


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (6): 1980-1986.DOI: 10.11772/j.issn.1001-9081.2024060878
• 多媒体计算与计算机仿真 • 上一篇
李维刚1,2, 李歆怡1( ), 王永强1, 赵云涛1
), 王永强1, 赵云涛1
收稿日期:2024-06-27
修回日期:2024-08-30
接受日期:2024-09-06
发布日期:2024-10-29
出版日期:2025-06-10
通讯作者:
李歆怡
作者简介:李维刚(1977—),男,湖北咸宁人,教授,博士,主要研究方向:工业过程控制、人工智能、机器学习算法基金资助:
Weigang LI1,2, Xinyi LI1(), Yongqiang WANG1, Yuntao ZHAO1
Received:2024-06-27
Revised:2024-08-30
Accepted:2024-09-06
Online:2024-10-29
Published:2025-06-10
Contact:
Xinyi LI
About author:LI Weigang, born in 1977, Ph. D., professor. His research interests include industrial process control, artificial intelligence, machine learning algorithms.Supported by:摘要:
针对传统卷积在处理点云时难以精确提取邻域特征信息和有效融合上下文信息的问题,提出一种基于自适应动态图卷积和无参注意力的点云分类分割方法。首先,通过自适应动态图卷积模块(ADGC)学习不同邻域的特征信息,生成自适应卷积核,并更新边缘特征,从而精确提取点云的局部邻域特征;其次,设计残差结构学习点云的空间位置信息,以精确捕获点对之间的几何结构,更好地保留和提取细节特征;最后,为了更好地关注和提取局部几何特征,结合无参注意力模块(PFA)与卷积操作,增强邻域之间的联系和模型的上下文感知能力。实验结果表明,与PointNet相比,所提方法在多种任务上具有显著优势,具体地,所提方法的分类任务的总体精度(OA)提升了4.6个百分点,部件分割任务实例的平均交并比(mIoU)提升了2.3个百分点,语义分割任务的mIoU提升了24.6个百分点。可见,所提方法进一步增强了对复杂几何结构的理解和表征能力,在各种任务中实现了更精确的特征提取和实验性能。
中图分类号:
李维刚, 李歆怡, 王永强, 赵云涛. 基于自适应动态图卷积和无参注意力的点云分类分割方法[J]. 计算机应用, 2025, 45(6): 1980-1986.
Weigang LI, Xinyi LI, Yongqiang WANG, Yuntao ZHAO. Point cloud classification and segmentation method based on adaptive dynamic graph convolution and parameter-free attention[J]. Journal of Computer Applications, 2025, 45(6): 1980-1986.
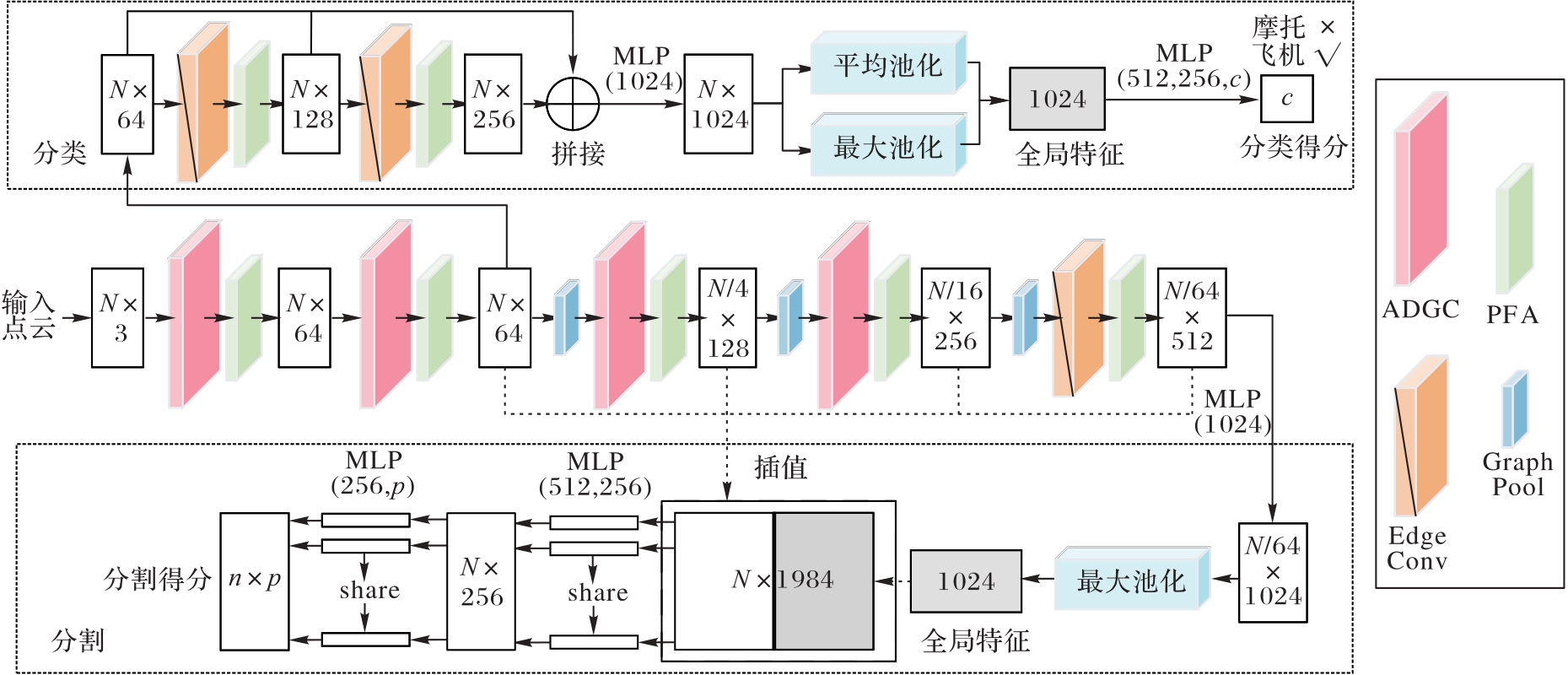
图1 本文方法框架
Fig. 1 Framework of proposed method
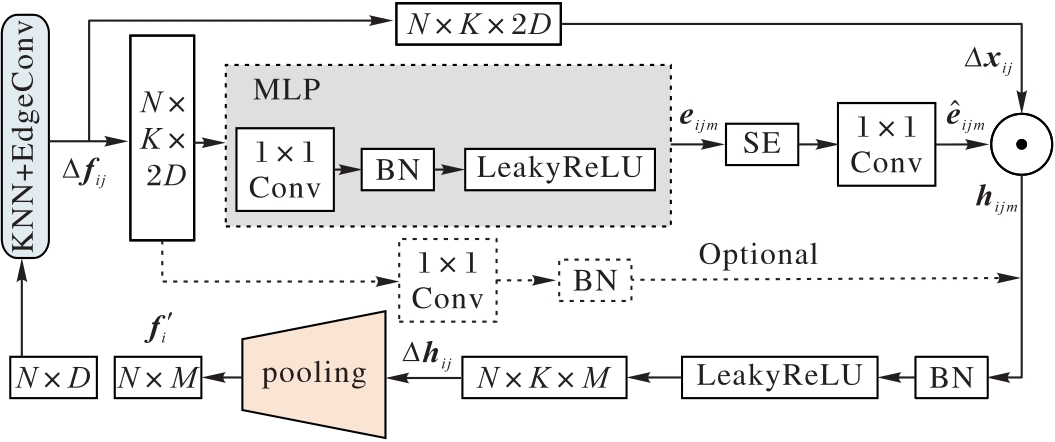
图2 ADGC的结构
Fig. 2 Architecture of ADGC
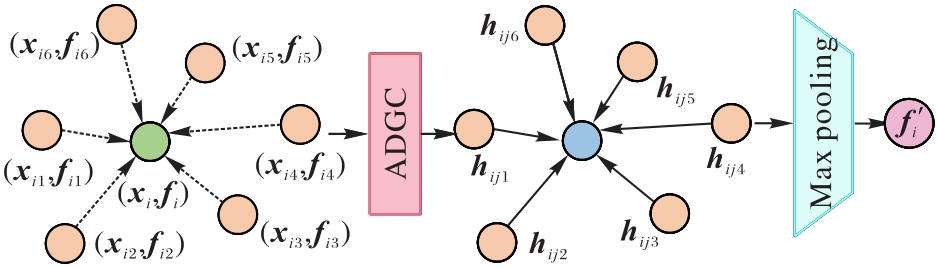
图3 ADGC在xi上的特征提取过程
Fig. 3 Feature extraction process of ADGC on xi
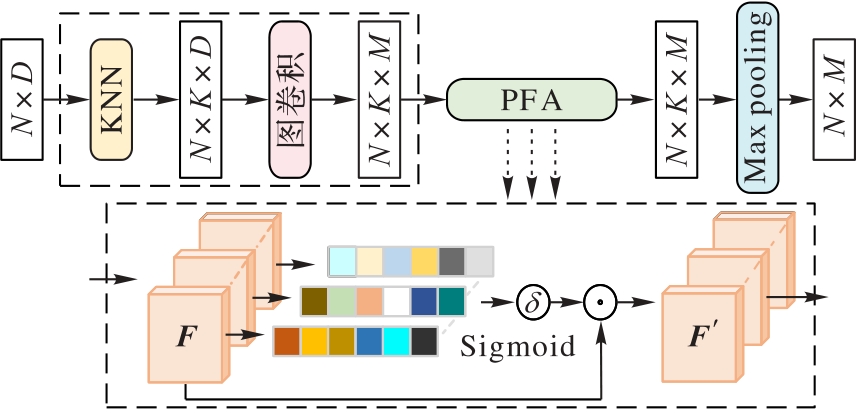
图4 注意力图卷积模块
Fig. 4 Attention graph convolution module
| 方法 | 输入 | mAcc | OA |
|---|---|---|---|
| MVCNN | View | — | 90.1 |
| 3D ShapeNets | Voxels | 77.5 | 84.5 |
| PointNet | xyz | 86.2 | 89.2 |
| PointNet++ | xyz+normal | — | 91.9 |
| PointCNN | xyz | — | 92.2 |
| DGCNN | xyz | 89.8 | 92.6 |
| 3D-GCN | xyz | — | 92.1 |
| PointASNL | xyz+normal | — | 93.2 |
| PCT | xyz | — | 93.2 |
| APES(local-based) | xyz | — | 93.5 |
| APES(global-based) | xyz | — | 93.8 |
| DHGCN | xyz | — | 93.0 |
| 本文方法 | xyz | 91.2 | 93.8 |
表1 在ModelNet40数据集上的分类结果 (%)
Tab. 1 Classification results on ModelNet40 dataset
| 方法 | 输入 | mAcc | OA |
|---|---|---|---|
| MVCNN | View | — | 90.1 |
| 3D ShapeNets | Voxels | 77.5 | 84.5 |
| PointNet | xyz | 86.2 | 89.2 |
| PointNet++ | xyz+normal | — | 91.9 |
| PointCNN | xyz | — | 92.2 |
| DGCNN | xyz | 89.8 | 92.6 |
| 3D-GCN | xyz | — | 92.1 |
| PointASNL | xyz+normal | — | 93.2 |
| PCT | xyz | — | 93.2 |
| APES(local-based) | xyz | — | 93.5 |
| APES(global-based) | xyz | — | 93.8 |
| DHGCN | xyz | — | 93.0 |
| 本文方法 | xyz | 91.2 | 93.8 |
| 方法 | mean | mIoU/% | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 包 | 帽子 | 汽车 | 椅子 | 耳机 | 吉他 | 刀 | 灯 | 电脑 | 摩托 | 水杯 | 手枪 | 火箭 | 滑板 | 桌子 | ||
| PointNet | 83.7 | 83.4 | 78.7 | 82.5 | 74.9 | 89.6 | 73.0 | 91.5 | 85.9 | 80.8 | 95.3 | 65.2 | 93.0 | 81.2 | 57.9 | 72.8 | 80.6 |
| PointNet++ | 85.1 | 82.4 | 79.0 | 87.7 | 77.3 | 90.8 | 71.8 | 91.0 | 85.9 | 83.7 | 95.3 | 71.6 | 94.1 | 91.3 | 58.7 | 76.4 | 82.6 |
| DGCNN | 85.2 | 84.0 | 83.4 | 86.7 | 77.8 | 90.6 | 73.5 | 90.7 | 83.9 | 82.8 | 95.7 | 66.3 | 94.9 | 81.1 | 63.5 | 74.5 | 82.6 |
| LDAGCC | 85.1 | 84.0 | 83.0 | 84.9 | 78.4 | 90.6 | 74.4 | 91.0 | 88.1 | 83.4 | 95.8 | 67.4 | 94.9 | 82.3 | 59.2 | 76.0 | 81.9 |
| 3D-GCN | 85.1 | 83.1 | 84.0 | 86.6 | 77.5 | 90.3 | 74.1 | 90.9 | 86.4 | 83.8 | 95.6 | 66.8 | 94.8 | 81.3 | 59.6 | 75.7 | 82.8 |
| SDANet | 85.3 | — | 82.9 | 84.8 | 79.0 | 90.7 | 68.6 | 91.0 | 87.1 | 82.8 | 95.6 | 73.0 | 95.6 | 82.5 | 61.2 | 76.2 | 83.1 |
| 本文方法 | 86.0 | 84.4 | 81.5 | 85.0 | 80.0 | 91.2 | 77.4 | 91.7 | 88.1 | 85.1 | 96.1 | 73.4 | 95.0 | 83.3 | 60.1 | 76.9 | 82.7 |
表2 在ShapeNetPart数据集上的部件分割结果 (%)
Tab. 2 Part segmentation results on ShapeNetPart dataset
| 方法 | mean | mIoU/% | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 飞机 | 包 | 帽子 | 汽车 | 椅子 | 耳机 | 吉他 | 刀 | 灯 | 电脑 | 摩托 | 水杯 | 手枪 | 火箭 | 滑板 | 桌子 | ||
| PointNet | 83.7 | 83.4 | 78.7 | 82.5 | 74.9 | 89.6 | 73.0 | 91.5 | 85.9 | 80.8 | 95.3 | 65.2 | 93.0 | 81.2 | 57.9 | 72.8 | 80.6 |
| PointNet++ | 85.1 | 82.4 | 79.0 | 87.7 | 77.3 | 90.8 | 71.8 | 91.0 | 85.9 | 83.7 | 95.3 | 71.6 | 94.1 | 91.3 | 58.7 | 76.4 | 82.6 |
| DGCNN | 85.2 | 84.0 | 83.4 | 86.7 | 77.8 | 90.6 | 73.5 | 90.7 | 83.9 | 82.8 | 95.7 | 66.3 | 94.9 | 81.1 | 63.5 | 74.5 | 82.6 |
| LDAGCC | 85.1 | 84.0 | 83.0 | 84.9 | 78.4 | 90.6 | 74.4 | 91.0 | 88.1 | 83.4 | 95.8 | 67.4 | 94.9 | 82.3 | 59.2 | 76.0 | 81.9 |
| 3D-GCN | 85.1 | 83.1 | 84.0 | 86.6 | 77.5 | 90.3 | 74.1 | 90.9 | 86.4 | 83.8 | 95.6 | 66.8 | 94.8 | 81.3 | 59.6 | 75.7 | 82.8 |
| SDANet | 85.3 | — | 82.9 | 84.8 | 79.0 | 90.7 | 68.6 | 91.0 | 87.1 | 82.8 | 95.6 | 73.0 | 95.6 | 82.5 | 61.2 | 76.2 | 83.1 |
| 本文方法 | 86.0 | 84.4 | 81.5 | 85.0 | 80.0 | 91.2 | 77.4 | 91.7 | 88.1 | 85.1 | 96.1 | 73.4 | 95.0 | 83.3 | 60.1 | 76.9 | 82.7 |
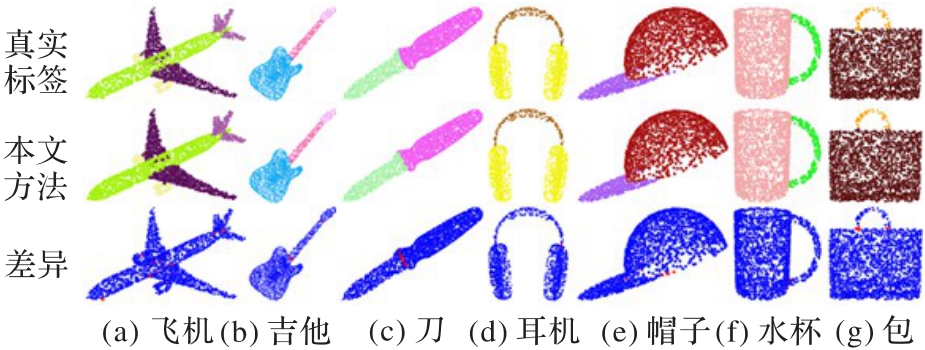
图5 ShapeNetPart数据集上部件分割结果的可视化
Fig. 5 Visualization of part segmentation results on ShapeNetPart dataset
| 方法 | OA | mAcc | mIoU |
|---|---|---|---|
| PointNet | — | 49.0 | 41.1 |
| 3D-GCN | — | — | 53.4 |
| PointCNN | 85.9 | 63.9 | 57.3 |
| GACNet | 87.8 | — | 62.9 |
| PointASNL | 87.7 | 68.5 | 62.6 |
| SDANet | — | — | 59.6 |
| 本文方法 | 89.3 | 71.1 | 65.7 |
表3 在S3DIS数据集上的语义分割结果 (%)
Tab. 3 Semantic segmentation results on S3DIS dataset
| 方法 | OA | mAcc | mIoU |
|---|---|---|---|
| PointNet | — | 49.0 | 41.1 |
| 3D-GCN | — | — | 53.4 |
| PointCNN | 85.9 | 63.9 | 57.3 |
| GACNet | 87.8 | — | 62.9 |
| PointASNL | 87.7 | 68.5 | 62.6 |
| SDANet | — | — | 59.6 |
| 本文方法 | 89.3 | 71.1 | 65.7 |
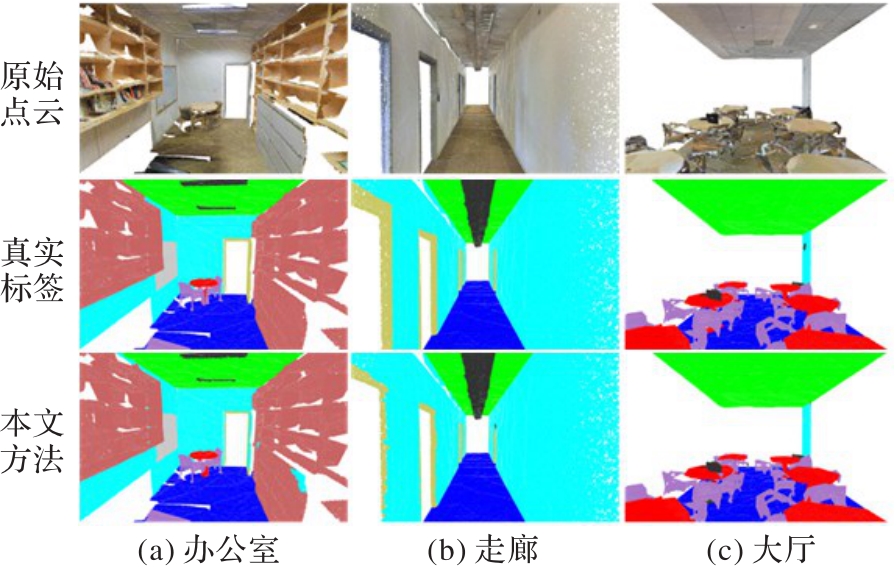
图6 S3DIS数据集上语义分割结果的可视化
Fig. 6 Visualization of semantic segmentation results on S3DIS dataset
| 分组 | EdgeConv | ADGC | PFA | mAcc | OA |
|---|---|---|---|---|---|
| A | √ | × | × | 90.0 | 92.7 |
| B | √ | × | √ | 90.4 | 93.4 |
| C | √ | √ | × | 90.3 | 93.2 |
| D | √ | √ | √ | 91.2 | 93.8 |
表4 在ModelNet40数据集上分类的消融实验结果 (%)
Tab. 4 Ablation experimental results for classification on ModelNet40 dataset
| 分组 | EdgeConv | ADGC | PFA | mAcc | OA |
|---|---|---|---|---|---|
| A | √ | × | × | 90.0 | 92.7 |
| B | √ | × | √ | 90.4 | 93.4 |
| C | √ | √ | × | 90.3 | 93.2 |
| D | √ | √ | √ | 91.2 | 93.8 |
| 分组 | EdgeConv | ADGC | PFA | mcIoU | mIoU |
|---|---|---|---|---|---|
| A | √ | × | × | 82.3 | 85.2 |
| B | √ | × | √ | 82.5 | 85.6 |
| C | √ | √ | × | 82.7 | 85.8 |
| D | √ | √ | √ | 83.2 | 86.0 |
表5 在ShapeNetPart数据集上分割的消融实验结果 (%)
Tab. 5 Ablation experimental results for segmentation on ShapeNetPart dataset
| 分组 | EdgeConv | ADGC | PFA | mcIoU | mIoU |
|---|---|---|---|---|---|
| A | √ | × | × | 82.3 | 85.2 |
| B | √ | × | √ | 82.5 | 85.6 |
| C | √ | √ | × | 82.7 | 85.8 |
| D | √ | √ | √ | 83.2 | 86.0 |
| K | mAcc/% | OA/% | K | mAcc/% | OA/% |
|---|---|---|---|---|---|
| 5 | 88.9 | 92.7 | 25 | 89.8 | 93.4 |
| 10 | 89.7 | 92.9 | 30 | 90.6 | 93.3 |
| 15 | 91.0 | 93.3 | 35 | 90.0 | 93.1 |
| 20 | 91.2 | 93.8 | 40 | 89.9 | 93.0 |
表6 不同K时的准确率
Tab. 6 Accuracy with different K
| K | mAcc/% | OA/% | K | mAcc/% | OA/% |
|---|---|---|---|---|---|
| 5 | 88.9 | 92.7 | 25 | 89.8 | 93.4 |
| 10 | 89.7 | 92.9 | 30 | 90.6 | 93.3 |
| 15 | 91.0 | 93.3 | 35 | 90.0 | 93.1 |
| 20 | 91.2 | 93.8 | 40 | 89.9 | 93.0 |
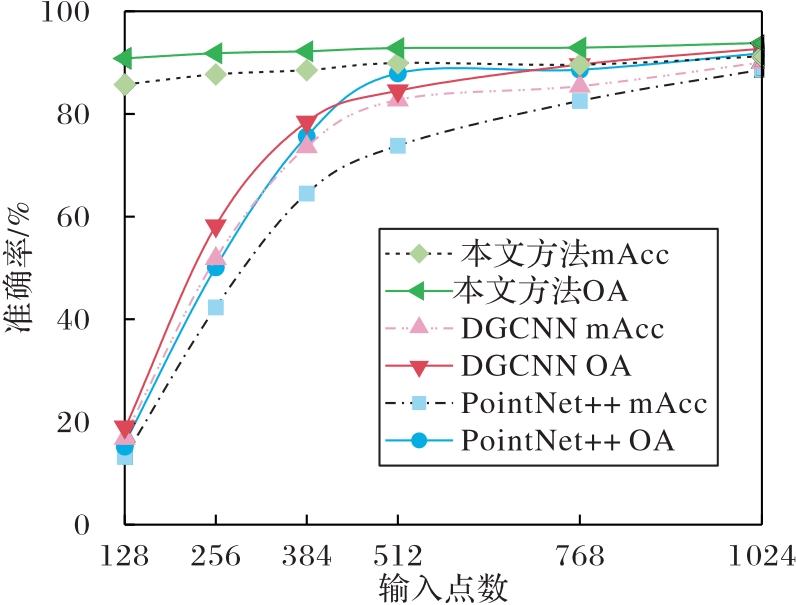
图7 在ModelNet40数据集上不同输入点的分类结果
Fig. 7 Classification results for different input points on ModelNet40 dataset
| 1 | FENG W, LI J, CAI H, et al. Neural points: point cloud representation with neural fields for arbitrary upsampling[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 18612-18621. |
| 2 | JIANG L, ZHANG J, DENG B. Robust RGB-D face recognition using attribute-aware loss[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(10): 2552-2566. |
| 3 | LI Y, IBANEZ-GUZMAN J. Lidar for autonomous driving: the principles, challenges, and trends for automotive lidar and perception systems[J]. IEEE Signal Processing Magazine, 2020, 37(4): 50-61. |
| 4 | XIONG J, HSIANG E L, HE Z, et al. Augmented reality and virtual reality displays: emerging technologies and future perspectives[J]. Light: Science and Applications, 2021, 10: No.216. |
| 5 | WANG J, CHEN J, SUN Y, et al. RobOT: robustness-oriented testing for deep learning systems[C]// Proceedings of the IEEE/ACM 43rd International Conference on Software Engineering. Piscataway: IEEE, 2021: 300-311. |
| 6 | MIRZAEI K, ARASHPOUR M, ASADI E, et al. 3D point cloud data processing with machine learning for construction and infrastructure applications: a comprehensive review[J]. Advanced Engineering Informatics, 2022, 51: No.101501. |
| 7 | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| 8 | SU H, MAJI S, KALOGERAKIS E, et al. Multi-view convolutional neural networks for 3D shape recognition[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 945-953. |
| 9 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| 10 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| 11 | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| 12 | ZHANG K, HAO M, WANG J, et al. Linked dynamic graph CNN: Learning on point cloud via linking hierarchical features[C]// Proceedings of the 27th International Conference on Mechatronics and Machine Vision in Practice. Piscataway: IEEE, 2021: 7-12. |
| 13 | WANG L, HUANG Y, HOU Y, et al. Graph attention convolution for point cloud semantic segmentation[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 10288-10297. |
| 14 | LIN Z H, HUANG S Y, WANG Y C F. Learning of 3D graph convolution networks for point cloud analysis[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(8): 4212-4224. |
| 15 | 李维刚,陈婷,田志强. 基于孪生自适应图卷积算法的点云分类与分割[J]. 计算机应用, 2023, 43(11): 3396-3402. |
| LI W G, CHEN T, TIAN Z Q. Point cloud classification and segmentation based on Siamese adaptive graph convolution algorithm [J]. Journal of Computer Applications, 2023, 43(11): 3396-3402. | |
| 16 | 刘斌,樊云超. 基于改进动态图卷积的点云分类模型[J]. 中国科技论文, 2022, 17(11): 1230-1235, 1266. |
| LIU B, FAN Y C. A point cloud classification model based on improved dynamic graph convolution [J]. China Sciencepaper, 2022, 17(11): 1230-1235, 1266. | |
| 17 | 任欢,王旭光. 注意力机制综述[J]. 计算机应用, 2021, 41(S1): 1-6. |
| REN H, WANG X G. Review of attention mechanism[J]. Journal of Computer Applications, 2021, 41(S1): 1-6. | |
| 18 | YAN X, ZHENG C, LI Z, et al. PointASNL: robust point clouds processing using nonlocal neural networks with adaptive sampling[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 5588-5597. |
| 19 | GUO M H, CAI J X, LIU Z N, et al. PCT: point cloud Transformer[J]. Computational Visual Media, 2021, 7(2): 187-199. |
| 20 | LU D, GAO K, XIE Q, et al. 3DPCT: 3D point cloud transformer with dual self-attention [EB/OL]. [2024-08-25].. |
| 21 | GAO J, LAN J, WANG B, et al. SDANet: spatial deep attention-based for point cloud classification and segmentation [J]. Machine Learning, 2022, 111(4): 1327-1348. |
| 22 | WU C, ZHENG J, PFROMMER J, et al. Attention-based point cloud edge sampling[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 5333-5343. |
| 23 | JIANG J, ZHAO L, LU X, et al. DHGCN: dynamic hop graph convolution network for self-supervised point cloud learning [C]// Proceedings of the 38th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2024: 12883-12891. |
| 24 | MA X, QIN C, YOU H, et al. Rethinking network design and local geometry in point cloud: a simple residual MLP framework[EB/OL]. [2024-08-25].. |
| 25 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. |
| 26 | YANG L, ZHANG R Y, LI L, et al. SimAM: a simple, parameter-free attention module for convolutional neural networks[C]// Proceedings of the 38th International Conference on Machine Learning. New York: JMLR.org, 2021: 11863-11874. |
| 27 | LI Y, BU R, SUN M, et al. PointCNN: convolution on X -transformed points[C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2018: 828-838. |
| 28 | YI L, KIM V G, CEYLAN D, et al. A scalable active framework for region annotation in 3D shape collections[J]. ACM Transaction on Graphics, 2016, 35(6): No.210. |
| 29 | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1534-1543. |
| [1] | 王海杰, 张广鑫, 史海, 陈树. 基于实体表示增强的文档级关系抽取[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1809-1816. |
| [2] | 李道全, 徐正, 陈思慧, 刘嘉宇. 融合变分自编码器与自适应增强卷积神经网络的网络流量分类模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1841-1848. |
| [3] | 颜文婧, 王瑞东, 左敏, 张青川. 基于风味嵌入异构图层次学习的食谱推荐模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1869-1878. |
| [4] | 翟社平, 黄妍, 杨晴, 杨锐. 融合三元组和文本属性的多视图实体对齐[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1793-1800. |
| [5] | 崔双双, 王宏志, 朱加昊, 吴昊. 面向低能耗高性能的分类器两阶段数据选择方法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1703-1711. |
| [6] | 王建华, 吴传宇, 许莉萍. 多因素柔性作业车间绿色调度的改进进化算法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1954-1962. |
| [7] | 王泉, 陆啟想, 施珮. 用于交通流量预测的多图扩散注意力网络[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1472-1479. |
| [8] | 李慧, 贾炳志, 王晨曦, 董子宇, 李纪龙, 仲兆满, 陈艳艳. 基于Swin Transformer的生成对抗网络水下图像增强模型[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1439-1446. |
| [9] | 陈路, 王怀瑶, 刘京阳, 闫涛, 陈斌. 融合空间-傅里叶域信息的机器人低光环境抓取检测[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1686-1693. |
| [10] | 王丹, 张文豪, 彭丽娟. 基于深度学习的智能反射面辅助通信系统信道估计[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1613-1618. |
| [11] | 陈凯, 叶海良, 曹飞龙. 基于局部-全局交互与结构Transformer的点云分类算法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1671-1676. |
| [12] | 陈满, 杨小军, 杨慧敏. 基于图卷积网络和终点诱导的行人轨迹预测[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1480-1487. |
| [13] | 胡婕, 武帅星, 曹芝兰, 张龑. 基于全域信息融合和多维关系感知的命名实体识别模型[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1511-1519. |
| [14] | 陈子和, 陈斌. 基于多表征融合的无监督点云异常检测[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1677-1685. |
| [15] | 张李伟, 梁泉, 胡禹涛, 朱乔乐. 基于分组卷积的通道重洗注意力机制[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1069-1076. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||