


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (5): 1534-1544.DOI: 10.11772/j.issn.1001-9081.2025050575
• 多媒体计算与计算机仿真 • 上一篇
樊耿鑫1,2,3, 韩慧妍1,2,3( ), 况立群1,2,3, 晋紫阳1,2,3, 赵华峰1,2,3
), 况立群1,2,3, 晋紫阳1,2,3, 赵华峰1,2,3
收稿日期:2025-05-27
修回日期:2025-09-26
接受日期:2025-10-10
发布日期:2025-10-17
出版日期:2026-05-10
通讯作者:
韩慧妍
作者简介:樊耿鑫(1999—),女,山西运城人,硕士研究生,CCF会员,主要研究方向:点云重建基金资助:
Gengxin FAN1,2,3, Huiyan HAN1,2,3(), Liqun KUANG1,2,3, Ziyang JIN1,2,3, Huafeng ZHAO1,2,3
Received:2025-05-27
Revised:2025-09-26
Accepted:2025-10-10
Online:2025-10-17
Published:2026-05-10
Contact:
Huiyan HAN
About author:FAN Gengxin, born in 1999, M. S. candidate. Her research interests include point cloud reconstruction.Supported by:摘要:
在机器人环境感知任务中,单视角点云因传感器视角受限导致几何信息严重缺失。基于计算机辅助设计(CAD)模型替换的点云重建方法通过检索相似模型并实施变形,可有效规避直接从点云中重建的结构失控风险。无监督三维形状检索与变形(U-RED)算法在保持重建结果可编辑性的同时可实现拓扑一致的CAD模型替换,但面对复杂拓扑结构物体时仍存在点云旋转平移不变性表征不足、同源部件间的几何相似性导致近邻部件区分困难、注意力权重分散以及梯度消失与爆炸引起的参数更新失效问题。针对上述挑战,在U-RED基础上提出基于向量神经元与特征仿射残差增强的无监督检索变形算法(VU-RED-F)。首先,构建向量神经元编码器(VNE),提升特征提取模块在点云旋转平移不变性表征的鲁棒性;其次,引入可学习的仿射变换残差以重构特征映射过程,自适应调整特征分布,增强网络对部件间局部几何结构的判别能力;最后,融合软阈值门控与残差校正,在约束注意力分布稀疏性的同时增强梯度传播稳定性,提升网络收敛效率,降低检索变形过程中的损失。在PartNet和ComplementMe合成数据集以及Scan2CAD真实数据集上的实验结果表明,VU-RED-F算法的平均倒角距离(cd)损失最小,提高了CAD模型的局部几何细节保真度。
中图分类号:
樊耿鑫, 韩慧妍, 况立群, 晋紫阳, 赵华峰. VU-RED-F:改进U-RED的单视角点云CAD模型替换[J]. 计算机应用, 2026, 46(5): 1534-1544.
Gengxin FAN, Huiyan HAN, Liqun KUANG, Ziyang JIN, Huafeng ZHAO. VU-RED-F: improved CAD model replacement for U-RED single-view point clouds[J]. Journal of Computer Applications, 2026, 46(5): 1534-1544.
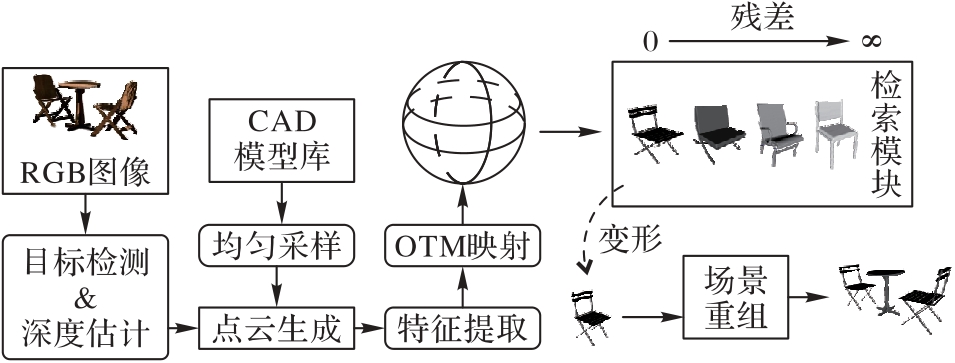
图1 U-RED算法的框架
Fig. 1 Framework of U-RED algorithm
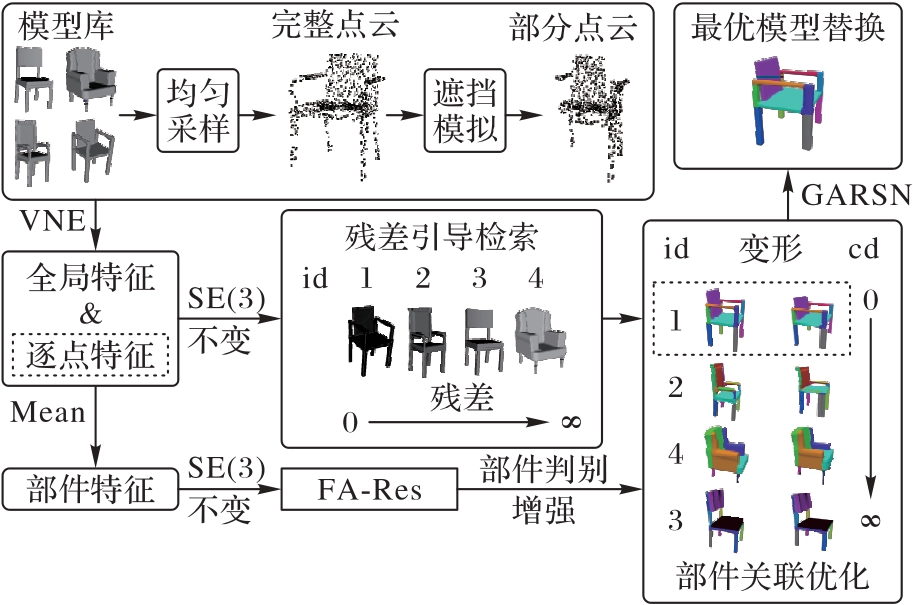
图2 VU-RED-F算法的框架
Fig. 2 Framework of VU-RED-F algorithm

图3 VNE的结构
Fig. 3 Structure of VNE
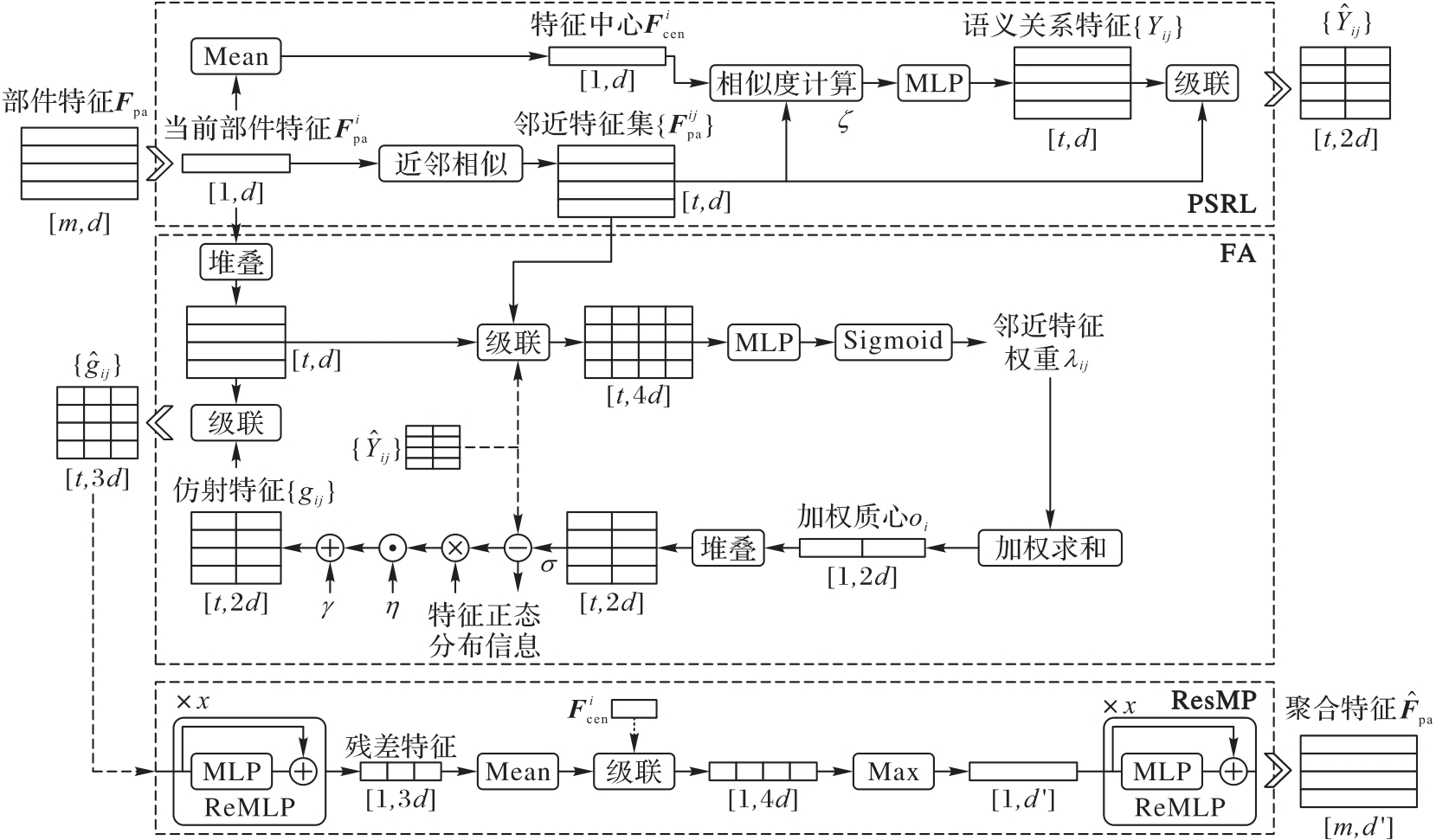
图4 FA-Res的结构
Fig. 4 Structure of FA-Res
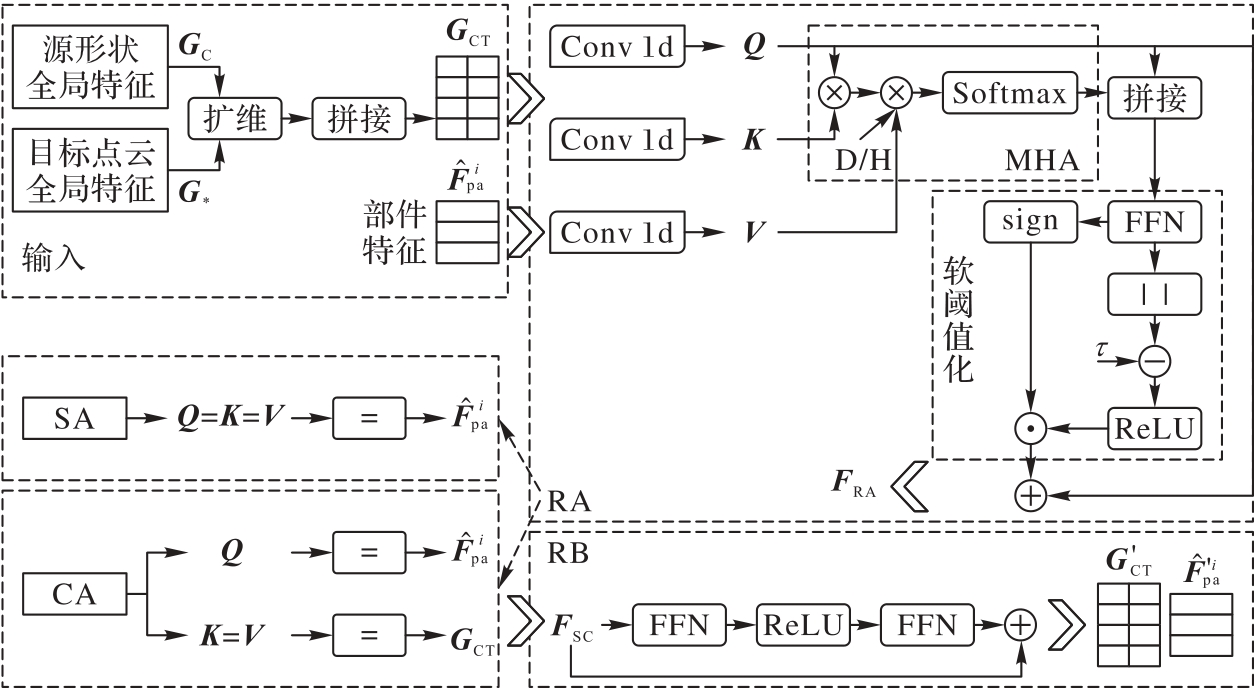
图5 GARSN的结构
Fig. 5 Structure of GARSN
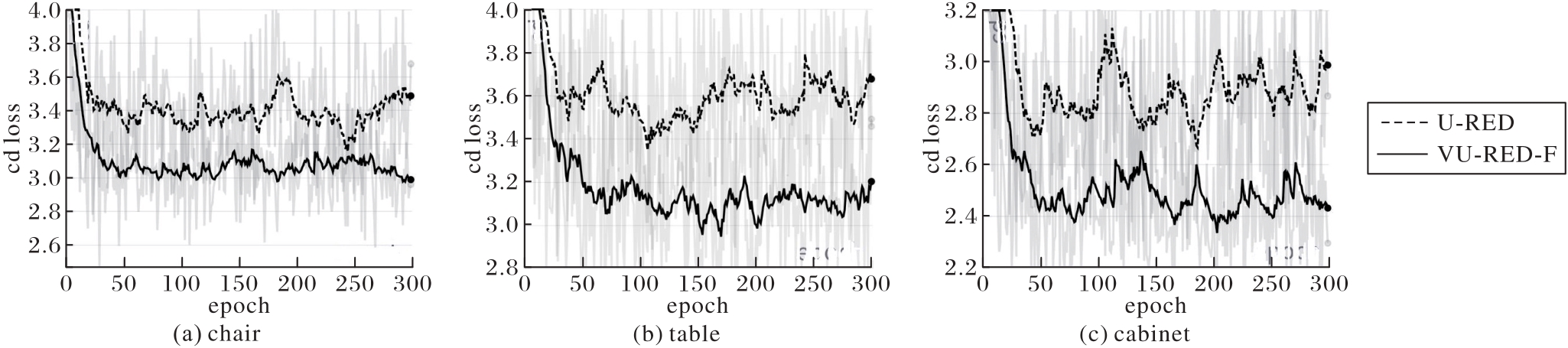
图6 PartNet数据集上的训练损失曲线
Fig. 6 Training loss curves on PartNet dataset
| 算法 | PartNet | Scan2CAD | ||||||
|---|---|---|---|---|---|---|---|---|
| chair | table | cabinet | 平均 | chair | table | cabinet | 平均 | |
| Uy[ | 2.02 | 2.32 | 2.63 | 2.22 | 3.36 | 6.65 | 7.26 | 4.90 |
| ROCA*[ | 2.50 | 2.72 | 3.86 | 2.72 | 4.24 | 14.97 | 15.92 | 9.15 |
| ROCA*[ | 3.80 | 3.87 | 2.82 | 3.76 | 6.99 | 8.10 | 13.08 | 8.10 |
| ROCA*[ | 2.53 | 3.28 | 2.49 | 2.90 | 5.15 | 7.33 | 9.72 | 6.42 |
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 | 2.89 | 3.16 | 5.95 | 3.35 |
| PT43D[ | 2.89 | 3.55 | 3.76 | 3.29 | 3.69 | 3.64 | 4.39 | 3.76 |
| DiffCAD[ | — | — | — | — | 6.40 | 7.20 | 6.90 | 6.71 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 | 2.43 | 2.62 | 4.96 | 2.80 |
表1 PartNet和Scan2CAD数据集上各算法的cd损失对比
Tab. 1 Comparison of cd loss for different algorithm on PartNet and Scan2CAD datasets
| 算法 | PartNet | Scan2CAD | ||||||
|---|---|---|---|---|---|---|---|---|
| chair | table | cabinet | 平均 | chair | table | cabinet | 平均 | |
| Uy[ | 2.02 | 2.32 | 2.63 | 2.22 | 3.36 | 6.65 | 7.26 | 4.90 |
| ROCA*[ | 2.50 | 2.72 | 3.86 | 2.72 | 4.24 | 14.97 | 15.92 | 9.15 |
| ROCA*[ | 3.80 | 3.87 | 2.82 | 3.76 | 6.99 | 8.10 | 13.08 | 8.10 |
| ROCA*[ | 2.53 | 3.28 | 2.49 | 2.90 | 5.15 | 7.33 | 9.72 | 6.42 |
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 | 2.89 | 3.16 | 5.95 | 3.35 |
| PT43D[ | 2.89 | 3.55 | 3.76 | 3.29 | 3.69 | 3.64 | 4.39 | 3.76 |
| DiffCAD[ | — | — | — | — | 6.40 | 7.20 | 6.90 | 6.71 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 | 2.43 | 2.62 | 4.96 | 2.80 |
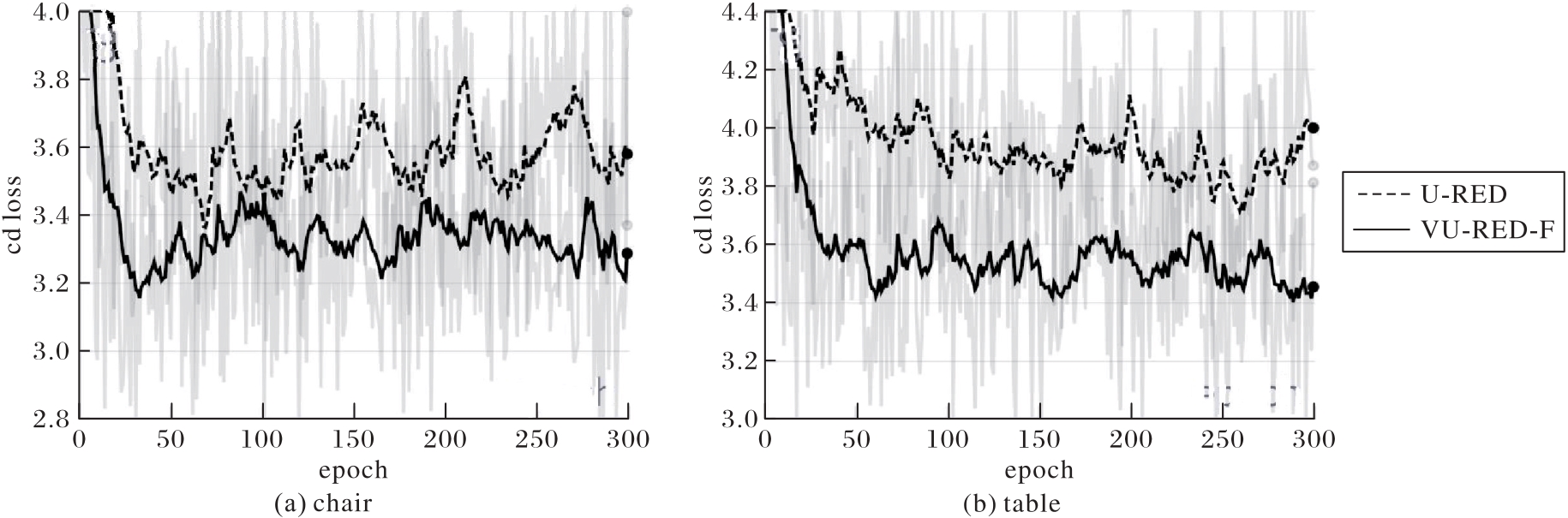
图7 ComplementMe数据集上的训练损失函数曲线
Fig. 7 Training loss curves on ComplementMe dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| Uy[ | 2.08 | 2.66 | — | 2.40 |
| U-RED[ | 1.68 | 2.26 | — | 2.00 |
| VU-RED-F | 1.37 | 1.91 | — | 1.67 |
表2 ComplementMe数据集上的cd损失对比
Tab. 2 Comparison of cd loss on ComplementMe dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| Uy[ | 2.08 | 2.66 | — | 2.40 |
| U-RED[ | 1.68 | 2.26 | — | 2.00 |
| VU-RED-F | 1.37 | 1.91 | — | 1.67 |
| 算法 | Params/106 | GFLOPs | Time/s |
|---|---|---|---|
| Uy[ | 12.71 | 1.55 | 1.5 |
| ROCA*[ | 50.37 | 40.96 | 3.1 |
| ROCA*[ | 57.41 | 40.96 | 3.5 |
| ROCA*[ | 57.93 | 40.96 | 3.5 |
| U-RED[ | 17.23 | 2.96 | 4.6 |
| PT43D[ | 75.97 | 9.7 | |
| DiffCAD[ | 94.34 | 12.1 | |
| VU-RED-F | 17.76 | 2.96 | 5.1 |
表3 不同算法的计算效率对比
Tab. 3 Computational efficiency comparison of different algorithms
| 算法 | Params/106 | GFLOPs | Time/s |
|---|---|---|---|
| Uy[ | 12.71 | 1.55 | 1.5 |
| ROCA*[ | 50.37 | 40.96 | 3.1 |
| ROCA*[ | 57.41 | 40.96 | 3.5 |
| ROCA*[ | 57.93 | 40.96 | 3.5 |
| U-RED[ | 17.23 | 2.96 | 4.6 |
| PT43D[ | 75.97 | 9.7 | |
| DiffCAD[ | 94.34 | 12.1 | |
| VU-RED-F | 17.76 | 2.96 | 5.1 |
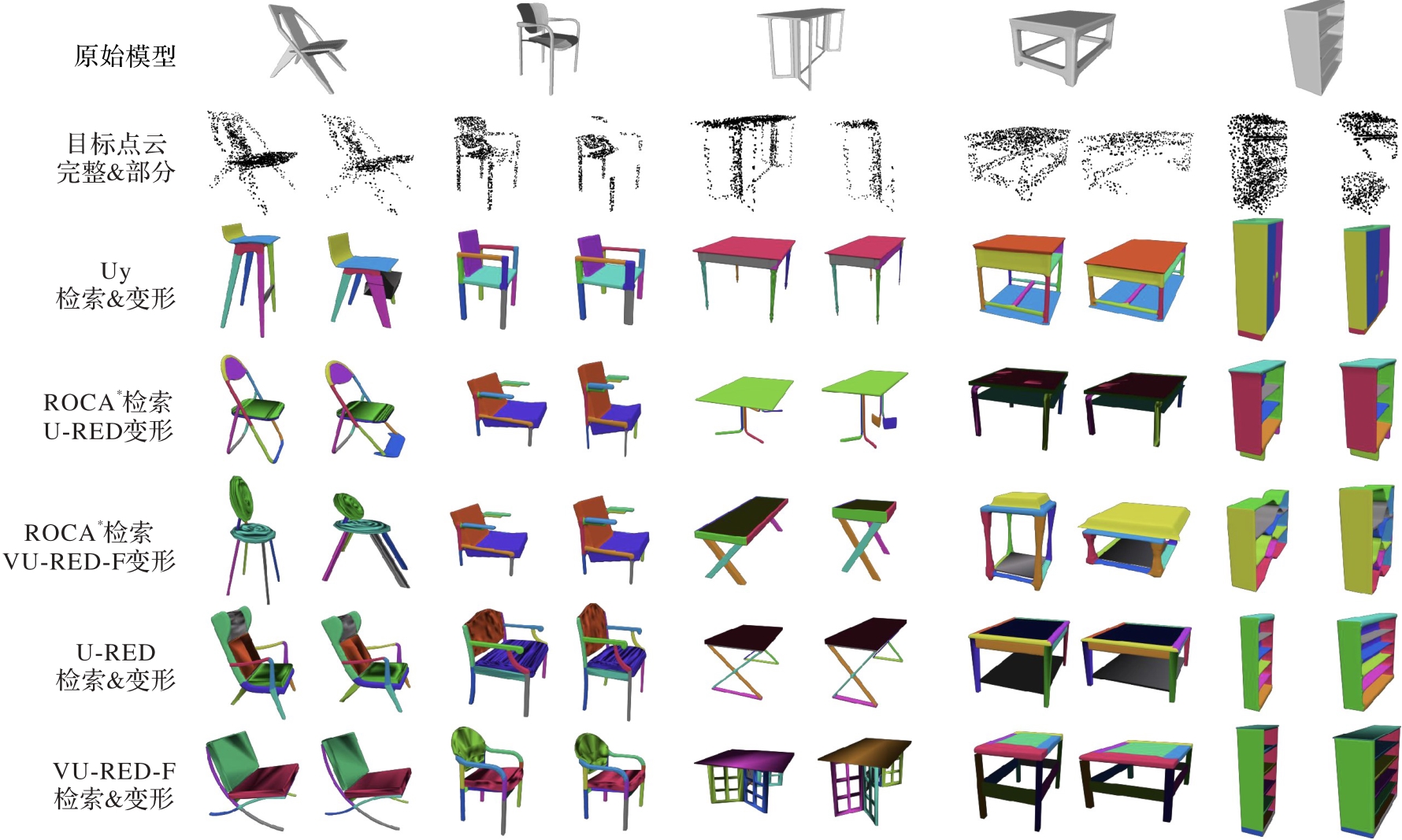
图8 PartNet数据集上的可视化对比
Fig. 8 Visual comparison on PartNet dataset
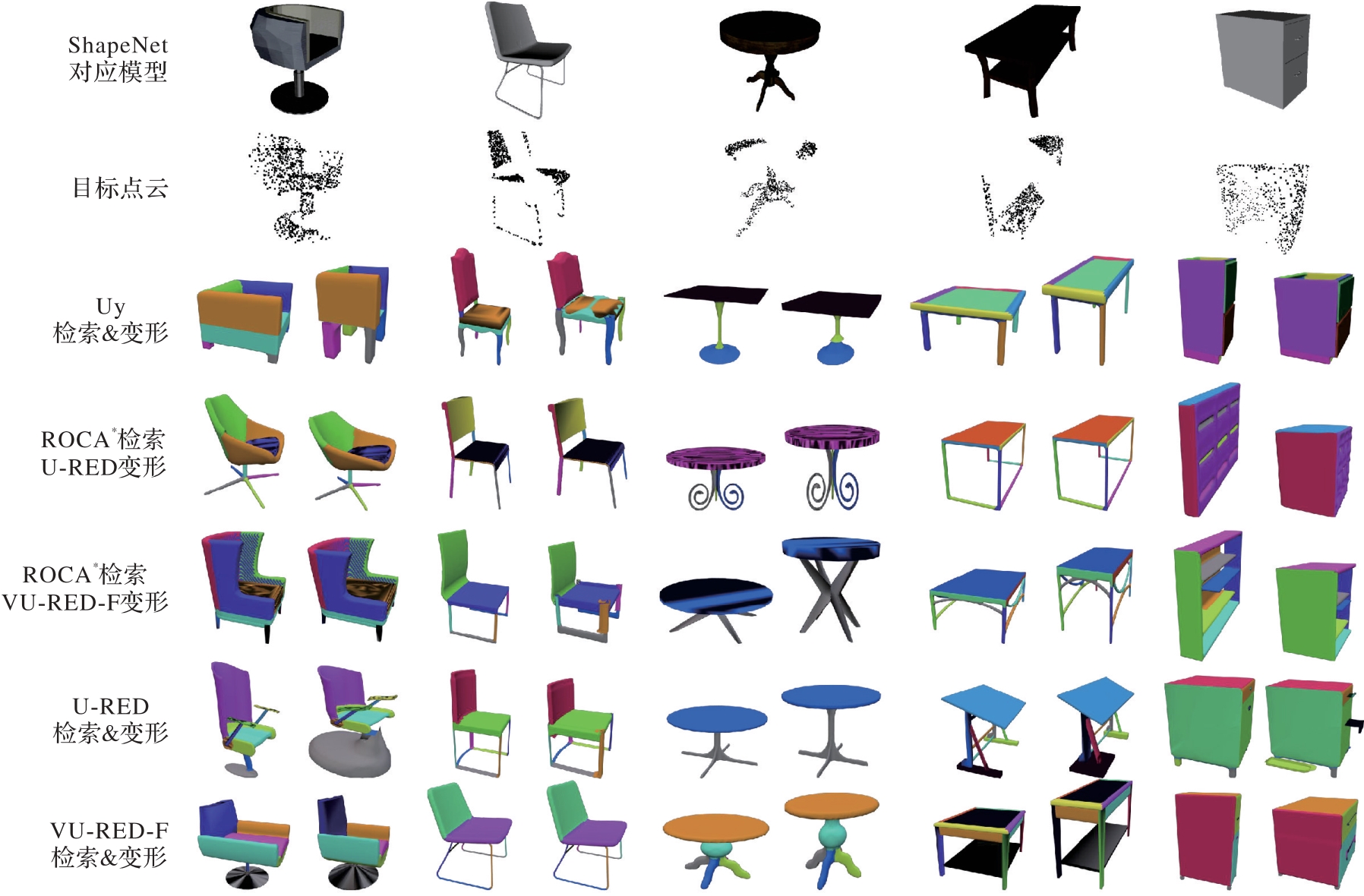
图9 Scan2CAD数据集上的可视化对比
Fig. 9 Visual comparison on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| VNE | 0.88 | 1.19 | 1.18 | 1.06 |
| FA-Res | 0.91 | 1.27 | 1.15 | 1.11 |
| GARSN | 0.96 | 1.20 | 1.25 | 1.10 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
表4 PartNet数据集上的单模块测试结果
Tab. 4 Single-module test results on PartNet dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| VNE | 0.88 | 1.19 | 1.18 | 1.06 |
| FA-Res | 0.91 | 1.27 | 1.15 | 1.11 |
| GARSN | 0.96 | 1.20 | 1.25 | 1.10 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| VNE | 2.66 | 2.87 | 5.70 | 3.10 |
| FA-Res | 2.65 | 2.85 | 5.39 | 3.05 |
| GARSN | 2.73 | 2.91 | 5.62 | 3.14 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
表5 Scan2CAD数据集上的单模块测试结果
Tab. 5 Single-module test results on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| VNE | 2.66 | 2.87 | 5.70 | 3.10 |
| FA-Res | 2.65 | 2.85 | 5.39 | 3.05 |
| GARSN | 2.73 | 2.91 | 5.62 | 3.14 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| no VNE | 0.85 | 1.13 | 1.09 | 1.01 |
| no FA-Res | 0.86 | 1.21 | 1.10 | 1.06 |
| no GARSN | 0.88 | 1.16 | 1.12 | 1.04 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
表6 PartNet数据集上的消融测试结果
Tab. 6 Ablation test results on PartNet dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| no VNE | 0.85 | 1.13 | 1.09 | 1.01 |
| no FA-Res | 0.86 | 1.21 | 1.10 | 1.06 |
| no GARSN | 0.88 | 1.16 | 1.12 | 1.04 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| no VNE | 2.55 | 2.79 | 5.24 | 2.96 |
| no FA-Res | 2.65 | 2.81 | 5.39 | 3.04 |
| no GARSN | 2.63 | 2.86 | 5.45 | 3.05 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
表7 Scan2CAD数据集上的消融测试结果
Tab. 7 Ablation test results on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| no VNE | 2.55 | 2.79 | 5.24 | 2.96 |
| no FA-Res | 2.65 | 2.81 | 5.39 | 3.04 |
| no GARSN | 2.63 | 2.86 | 5.45 | 3.05 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
| 遮挡比例/% | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| 0 | 0.75 | 1.07 | 0.99 | 0.93 |
| 25 | 0.78 | 1.08 | 1.02 | 0.95 |
| 50 | 0.81 | 1.10 | 1.03 | 0.97 |
| 75 | 0.93 | 1.54 | 1.20 | 1.26 |
表8 遮挡测试结果
Tab. 8 Obstruction test results
| 遮挡比例/% | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| 0 | 0.75 | 1.07 | 0.99 | 0.93 |
| 25 | 0.78 | 1.08 | 1.02 | 0.95 |
| 50 | 0.81 | 1.10 | 1.03 | 0.97 |
| 75 | 0.93 | 1.54 | 1.20 | 1.26 |
| [1] | 邱云飞,赵静,方立. MF-Net:结合残差网络的多尺度特征点云补全网络[J]. 计算机工程与应用, 2023, 59(22): 202-212. |
| QIU Y F, ZHAO J, FANG L. MF-Net: multi-scale feature point cloud completion network combined with residual network[J]. Computer Engineering and Applications, 2023, 59(22): 202-212. | |
| [2] | MO S, XIE E, CHU R, et al. DiT-3D: exploring plain diffusion Transformers for 3D shape generation[C]// Proceedings of the 37th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2023: 67960-67971. |
| [3] | XIONG Y, DAI A. PT43D: a probabilistic Transformer for generating 3D shapes from single highly-ambiguous RGB images[C]// Proceedings of the 2024 British Machine Vision Conference. Durham: BMVA Press, 2024: No.77. |
| [4] | WU Y, YAN Z, CHEN C, et al. SCoDA: domain adaptive shape completion for real scans[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 17630-17641. |
| [5] | 任世兴,韩燮,赵融,等. 一种由部件隐向量驱动的隐式三维重建方法[J]. 微电子学与计算机, 2025, 42(11): 9-1. |
| REN S X, HAN X, ZHAO R, et al. An implicit 3D reconstruction method driven by latent vectors of the components[J]. Microelectronics and Computer, 2025, 42(11): 9-1. | |
| [6] | RAHMAWATI D, SARNO R, FATICHAH C. Modification rules for improving marching cubes algorithm to represent 3D point cloud curve images[J]. International Journal of Intelligent Engineering and Systems, 2024, 17(1): 536-554. |
| [7] | WU R, XIAO C, ZHENG C. DeepCAD: a deep generative network for computer-aided design models[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 6752-6762. |
| [8] | IRSHAD M Z, KOLLAR T, LASKEY M, et al. CenterSnap: single-shot multi-object 3D shape reconstruction and categorical 6D pose and size estimation[C]// Proceedings of the 2022 International Conference on Robotics and Automation. Piscataway: IEEE, 2022: 10632-10640. |
| [9] | SHUAI Q, ZHANG C, YANG K, et al. DPF-Net: combining explicit shape priors in deformable primitive field for unsupervised structural reconstruction of 3D objects[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 14275-14283. |
| [10] | UY M A, HUANG J, SUNG M, et al. Deformation-aware 3D model embedding and retrieval[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12352. Cham: Springer, 2020: 397-413. |
| [11] | UY M A, KIM V G, SUNG M, et al. Joint learning of 3D shape retrieval and deformation[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11708-11717. |
| [12] | GÜMELI C, DAI A, NIEßNER M. ROCA: robust CAD model retrieval and alignment from a single image[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 4012-4021. |
| [13] | DI Y, ZHANG C, ZHANG R, et al. U-RED: unsupervised 3D shape retrieval and deformation for partial point clouds[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 8850-8861. |
| [14] | GAO D, ROZENBERSZKI D, LEUTENEGGER S, et al. DiffCAD: weakly-supervised probabilistic CAD model retrieval and alignment from an RGB image[J]. ACM Transactions on Graphics, 2024, 43(4): No.106. |
| [15] | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| [16] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [17] | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| [18] | GAO Y, LIU X, LI J, et al. LFT-Net: local feature Transformer network for point clouds analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 2158-2168. |
| [19] | DENG C, LITANY O, DUAN Y, et al. Vector Neurons: a general framework for SO(3)-equivariant networks[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 12180-12189. |
| [20] | ZHANG Z, ZHANG L, WANG Z, et al. Part-level scene reconstruction affords robot interaction[C]// Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2023: 11178-11185. |
| [21] | ZHAN L, LI W, MIN W. FA-ResNet: feature affine residual network for large-scale point cloud segmentation[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 118: No.103259. |
| [22] | HANOCKA R, HERTZ A, FISH N, et al. MeshCNN: a network with an edge[J]. ACM Transactions on Graphics, 2019, 38(4): No.90. |
| [23] | THEKUMPARAMPIL K K, WANG C, OH S, et al. Attention-based graph neural network for semi-supervised learning[EB/OL]. [2025-04-07].. |
| [24] | FAN H, SU H, GUIBAS L. A point set generation network for 3D object reconstruction from a single image[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2463-2471. |
| [25] | GOYAL A, BOCHKOVSKIY A, DENG J, et al. Non-deep networks[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 6789-6801. |
| [26] | BORAWAR L, KAUR R. ResNet: solving vanishing gradient in deep networks[C]// Proceedings of International Conference on Recent Trends in Computing: ICRTC 2022, LNNS 600. Singapore: Springer, 2023: 235-247. |
| [27] | YU S, PANG S, SONG L, et al. TSoft-Net: a novel transfer soft thresholding network based on self-attention for intelligent fault diagnosis of rotating machinery[J]. Measurement, 2024, 227: No.114237. |
| [28] | MO K, ZHU S, CHANG A X, et al. PartNet: a large-scale benchmark for fine-grained and hierarchical part-level 3D object understanding[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 909-918. |
| [29] | CHANG A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: an information-rich 3D model repository[EB/OL]. [2025-04-07].. |
| [30] | SUNG M, SU H, KIM V G, et al. ComplementMe: weakly-supervised component suggestions for 3D modeling[J]. ACM Transactions on Graphics, 2017, 36(6): No.226. |
| [31] | DAI A, CHANG A X, SAVVA M, et al. ScanNet: richly-annotated 3D reconstructions of indoor scenes[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2432-2443. |
| [32] | AVETISYAN A, DAHNERT M, DAI A, et al. Scan2CAD: learning CAD model alignment in RGB-D scans[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 2609-2618. |
| [1] | 张维, 龚中伟, 李志新, 罗佩华, 宋玲玲. 学习行为增强的知识追踪模型[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2747-2754. |
| [2] | 宫智宇, 王士同. 面向重尾噪声图像分类的残差网络学习方法[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3091-3100. |
| [3] | 刘源泂, 何茂征, 黄益斌, 钱程. 基于ResNet50和改进注意力机制的船舶识别模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1935-1941. |
| [4] | 郭琳, 刘坤虎, 马晨阳, 来佑雪, 徐映芬. 基于感受野扩展残差注意力网络的图像超分辨率重建[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1579-1587. |
| [5] | 付顺旺, 陈茜, 李智, 王国美, 卢妤. 用于篡改图像检测和定位的双通道渐进式特征过滤网络[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1303-1309. |
| [6] | 周景贤, 李希娜. 基于改进卷积神经网络和射频指纹的无人机检测与识别[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 876-882. |
| [7] | 黄学雨, 贺怀宇, 林慧敏, 陈金水. 基于特征聚合的铜合金金相图分类识别方法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2593-2601. |
| [8] | 张慧斌, 冯丽萍, 郝耀军, 王一宁. 基于注意力机制和迁移学习的古壁画朝代识别[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1826-1832. |
| [9] | 申利华, 李波. 基于特征金字塔网络和密集网络的肺部CT图像超分辨率重建[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1612-1619. |
| [10] | 宋其洪, 刘建勋, 扈海泽, 张祥平. 基于协同融合网络的代码搜索模型[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3896-3902. |
| [11] | 张志昂, 廖光忠. 基于U-Net的多尺度特征增强视网膜血管分割算法[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3275-3281. |
| [12] | 廖列法, 李志明, 张赛赛. 基于深度残差网络的迭代量化哈希图像检索方法[J]. 《计算机应用》唯一官方网站, 2022, 42(9): 2845-2852. |
| [13] | 贺怀清, 闫建青, 惠康华. 基于深度残差网络的轻量级人脸识别方法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2030-2036. |
| [14] | 张杨, 郝江波. 基于注意力机制和残差网络的恶意代码检测方法[J]. 《计算机应用》唯一官方网站, 2022, 42(6): 1708-1715. |
| [15] | 董明宇, 严迪群. 基于ResNet的音频场景声替换造假的检测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(6): 1724-1728. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||