


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (6): 1998-2006.DOI: 10.11772/j.issn.1001-9081.2025060723
熊珍凯1,2( ), 徐梦军1,2, 孙胤胤3, 王鑫4
), 徐梦军1,2, 孙胤胤3, 王鑫4
收稿日期:2025-06-30
修回日期:2025-09-24
接受日期:2025-09-26
发布日期:2025-10-21
出版日期:2026-06-10
通讯作者:
熊珍凯
作者简介:徐梦军(2001—),男,安徽阜阳人,硕士研究生,主要研究方向:机器视觉、人工智能基金资助:
Zhenkai XIONG1,2(), Mengjun XU1,2, Yinyin SUN3, Xin WANG4
Received:2025-06-30
Revised:2025-09-24
Accepted:2025-09-26
Online:2025-10-21
Published:2026-06-10
Contact:
Zhenkai XIONG
About author:XU Mengjun, born in 2001, M. S. candidate. His research interests include machine vision, artificial intelligence.Supported by:摘要:
针对海面船舶检测任务在雨雾和低光照等复杂天气环境下存在的漏检与误检问题,提出一种基于改进YOLOv8的复杂天气环境海面船舶检测算法。首先,提出跨层次局部与全局注意力融合模块(CGLGAFB),通过构建精细化的局部和全局特征融合机制,并结合多路特征融合策略整合来自不同层次的多源特征信息,提升模型的特征融合能力,抑制噪声干扰与信息冗余;其次,改进原C2f (Faster Implementation of CSP Bottleneck with 2 convolutions)模块为自适应混合C2f模块(C2f-AMB),通过有自适应感受野调节能力的深度卷积分支,使模型能够更灵活、更高效地捕获不同尺度与复杂空间结构的目标特征,增强特征提取能力;最后,提出多尺度空间感知金字塔(MSPP)模块替换SPPF(Spatial Pyramid Pooling-Fast)模块,利用不同空洞率的空洞卷积构建多尺度感受野,获取全面的上下文信息,减少关键信息遗漏。在增强后的数据集SeaShips_aug上的实验结果表明,所提算法的mAP@50和召回率分别达到84.7%和79.3%,比基线模型YOLOv8分别高了2.6和3.9个百分点,验证了所提算法更适合复杂天气环境下的海面船舶检测任务。
中图分类号:
熊珍凯, 徐梦军, 孙胤胤, 王鑫. 基于改进YOLOv8的复杂天气环境下海面船舶检测算法[J]. 计算机应用, 2026, 46(6): 1998-2006.
Zhenkai XIONG, Mengjun XU, Yinyin SUN, Xin WANG. Maritime ship detection algorithm under complex weather environments based on enhanced YOLOv8[J]. Journal of Computer Applications, 2026, 46(6): 1998-2006.
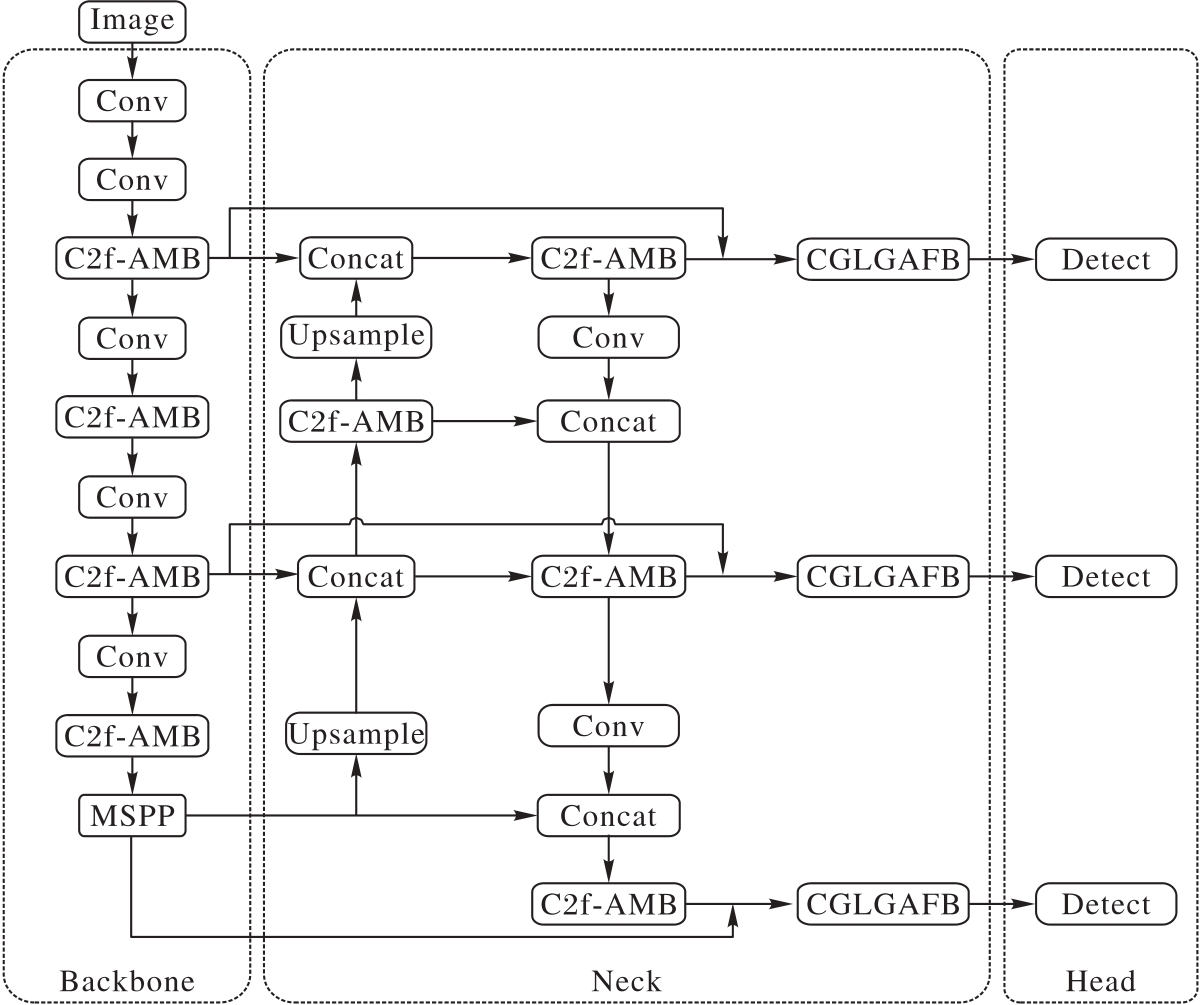
图1 改进模型的网络结构
Fig. 1 Network structure of improved model
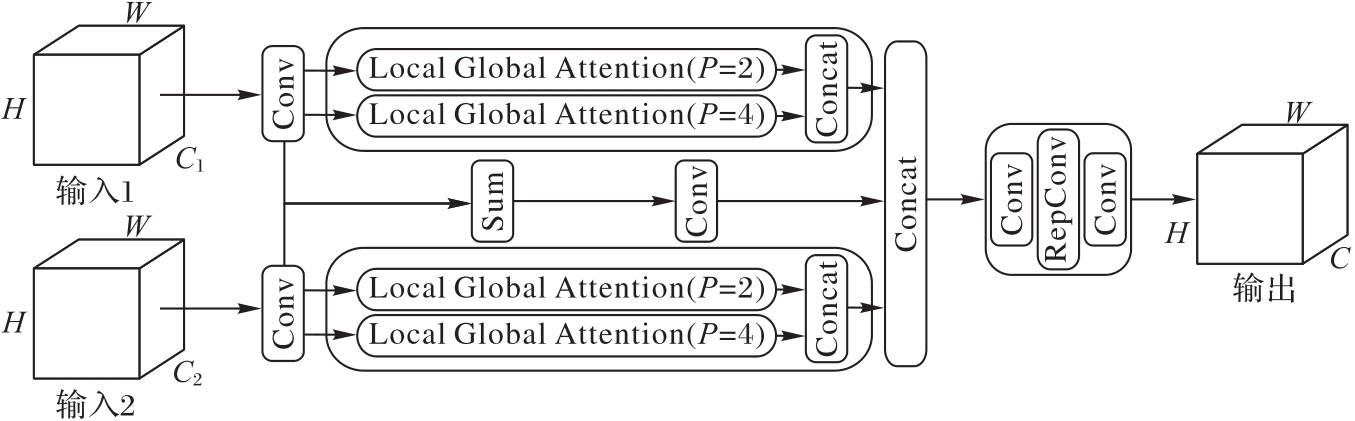
图2 CGLGAFB的结构
Fig. 2 Structure of CGLGAFB
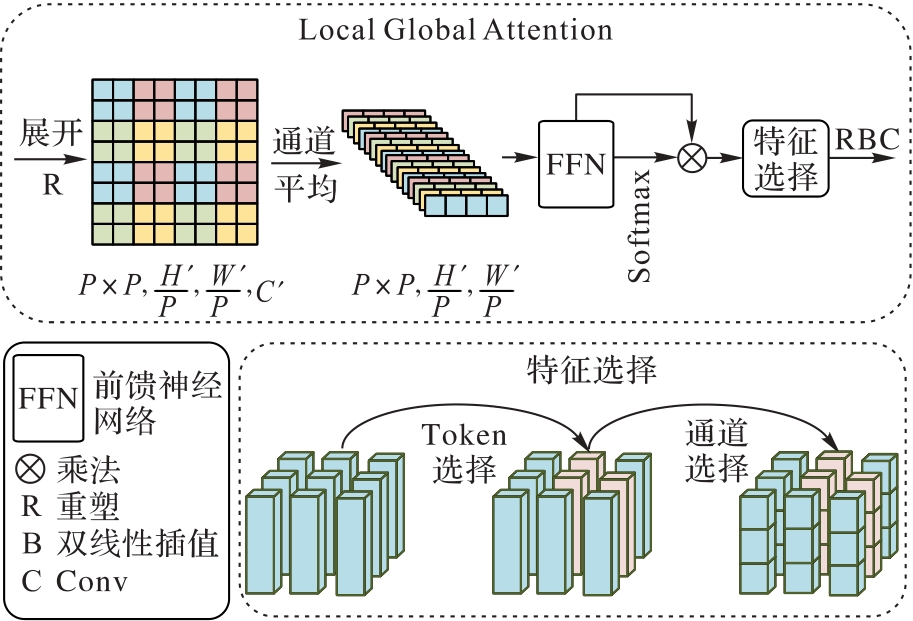
图3 Local Global Attention的结构
Fig. 3 Structure of Local Global Attention
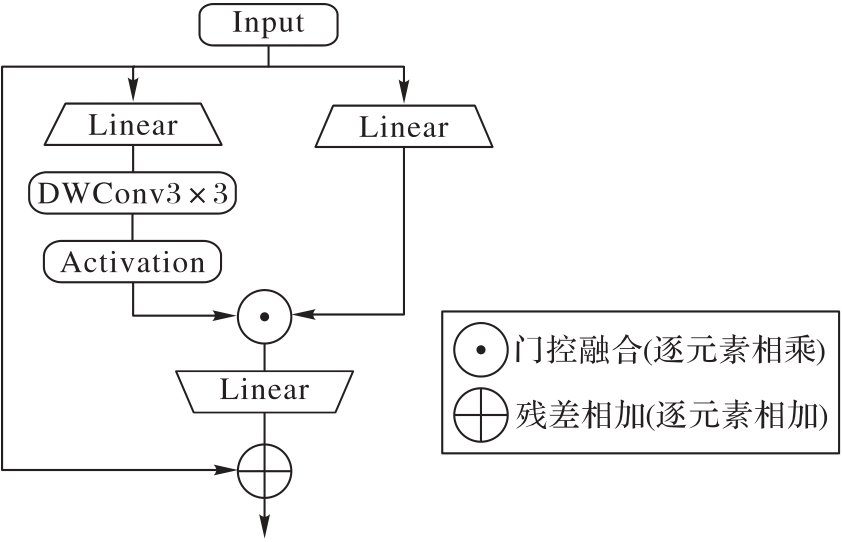
图4 CGLU的结构
Fig. 4 Structure of CGLU
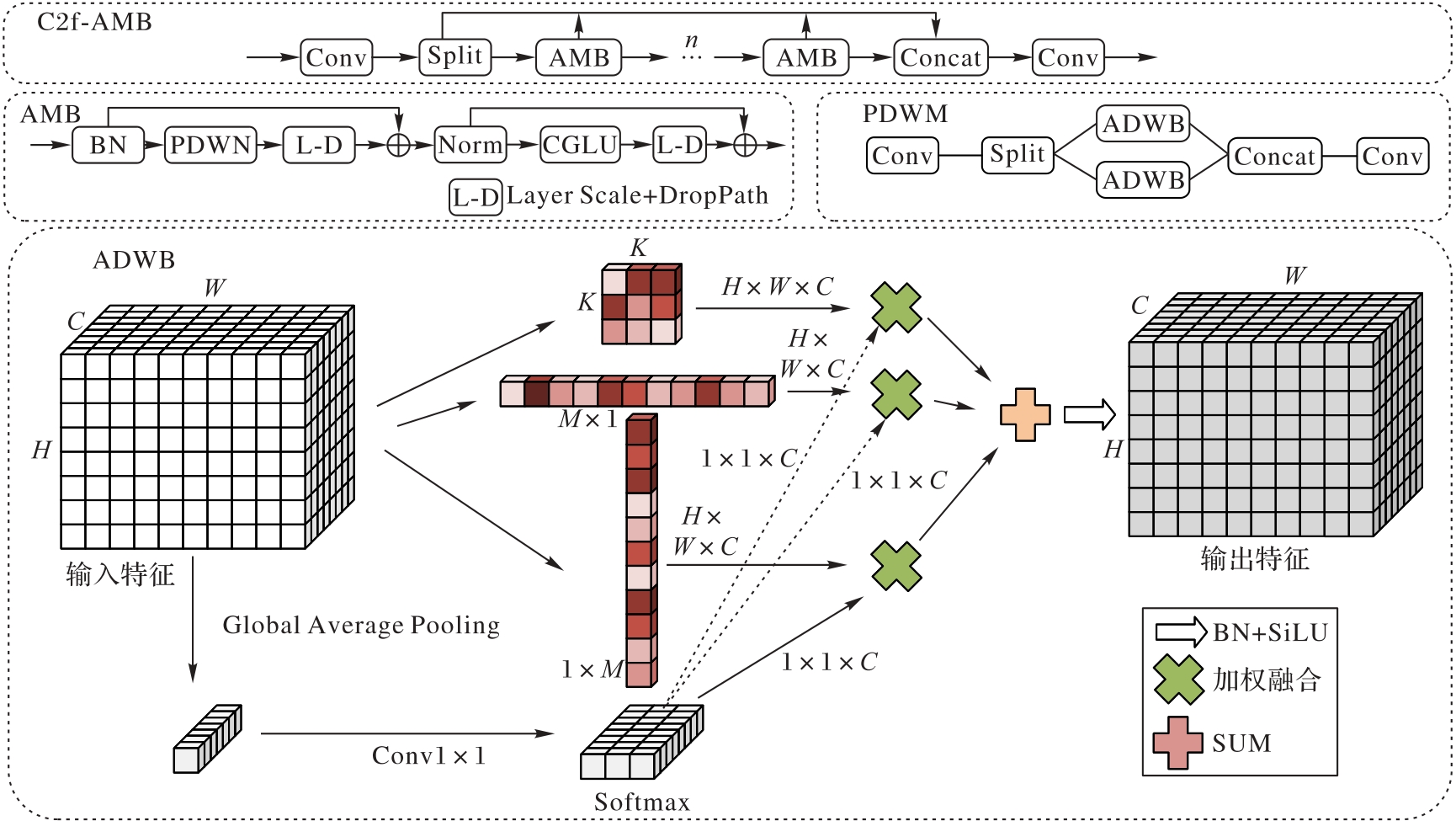
图5 C2f-AMB及其组成的结构
Fig. 5 Structure of C2f-AMB and its composition
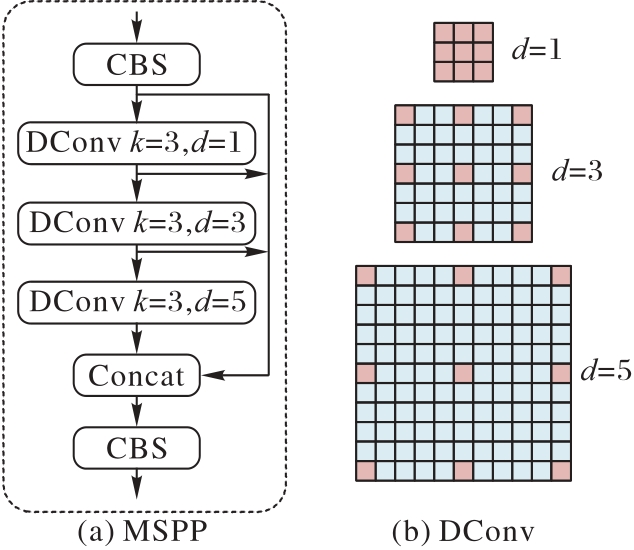
图6 MSPP模块和DConv的结构
Fig.6 Structures of MSPP module and DConv
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 输入尺寸 | 640×640 | 优化器 | SGD |
| 初始学习率 | 1×10-2 | 动量 | 0.937 |
| 迭代次数 | 150 | 线程数 | 4 |
| 批量大小 | 32 | 热身轮数 | 3 |
表1 训练参数设置
Tab. 1 Training parameter setting
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 输入尺寸 | 640×640 | 优化器 | SGD |
| 初始学习率 | 1×10-2 | 动量 | 0.937 |
| 迭代次数 | 150 | 线程数 | 4 |
| 批量大小 | 32 | 热身轮数 | 3 |
| Baseline | ① | ② | ③ | mAP@50/ % | mAP@50-95/ % | Params | FLOPs/ 109 | Size/MB |
|---|---|---|---|---|---|---|---|---|
| √ | × | × | × | 0.821 | 0.563 | 3 006 818 | 8.1 | 6.2 |
| √ | √ | × | × | 0.839 | 0.580 | 3 807 842 | 9.3 | 8.0 |
| √ | × | √ | × | 0.837 | 0.554 | 2 339 190 | 6.3 | 4.8 |
| √ | × | × | √ | 0.834 | 0.568 | 3 154 274 | 8.1 | 6.5 |
| √ | √ | √ | √ | 0.847 | 0.571 | 3 287 670 | 7.5 | 6.7 |
表2 消融实验结果
Tab. 2 Ablation experiment results
| Baseline | ① | ② | ③ | mAP@50/ % | mAP@50-95/ % | Params | FLOPs/ 109 | Size/MB |
|---|---|---|---|---|---|---|---|---|
| √ | × | × | × | 0.821 | 0.563 | 3 006 818 | 8.1 | 6.2 |
| √ | √ | × | × | 0.839 | 0.580 | 3 807 842 | 9.3 | 8.0 |
| √ | × | √ | × | 0.837 | 0.554 | 2 339 190 | 6.3 | 4.8 |
| √ | × | × | √ | 0.834 | 0.568 | 3 154 274 | 8.1 | 6.5 |
| √ | √ | √ | √ | 0.847 | 0.571 | 3 287 670 | 7.5 | 6.7 |
| 模型 | P/% | R/% | mAP@50/ % | FLOPs/ 109 | Params/ 106 | Size/ MB |
|---|---|---|---|---|---|---|
| SSD | 61.7 | 78.0 | 62.5 | 30.7 | 24.4 | 187.6 |
| Faster R-CNN | 61.8 | 77.1 | 62.6 | 208.0 | 41.4 | 317.5 |
| YOLOXs | 63.4 | 79.6 | 64.9 | 7.6 | 5.0 | 70.4 |
| RTMDET-tiny | 65.1 | 80.0 | 65.7 | 30.7 | 24.4 | 31.7 |
| Cascade RCNN | 69.3 | 75.3 | 69.7 | 236.0 | 69.2 | 533.0 |
| DINO R-50 | 65.9 | 75.2 | 68.9 | 274.0 | 47.6 | 602.9 |
| YOLOV5s | 77.3 | 76.1 | 79.8 | 4.2 | 1.8 | 3.8 |
| YOLOV7-tiny | 79.6 | 76.7 | 80.6 | 13.1 | 6.0 | 11.7 |
| YOLOV10n | 83.0 | 74.0 | 80.9 | 6.5 | 2.3 | 5.7 |
| YOLO11n | 80.8 | 77.3 | 81.8 | 6.3 | 2.6 | 5.5 |
| YOLOV12n | 82.3 | 78.0 | 83.2 | 5.8 | 2.5 | 5.2 |
| YOLOV13n | 82.6 | 73.0 | 80.9 | 6.2 | 2.5 | 5.2 |
| Hyper-YOLO | 82.8 | 76.1 | 82.3 | 11.0 | 3.9 | 7.8 |
| YOLOV8n | 81.3 | 75.4 | 82.1 | 8.1 | 3.0 | 6.2 |
| 本文模型 | 83.3 | 79.3 | 84.7 | 7.5 | 3.3 | 6.7 |
表3 不同模型的对比实验结果
Tab. 3 Comparison experiment results of different models
| 模型 | P/% | R/% | mAP@50/ % | FLOPs/ 109 | Params/ 106 | Size/ MB |
|---|---|---|---|---|---|---|
| SSD | 61.7 | 78.0 | 62.5 | 30.7 | 24.4 | 187.6 |
| Faster R-CNN | 61.8 | 77.1 | 62.6 | 208.0 | 41.4 | 317.5 |
| YOLOXs | 63.4 | 79.6 | 64.9 | 7.6 | 5.0 | 70.4 |
| RTMDET-tiny | 65.1 | 80.0 | 65.7 | 30.7 | 24.4 | 31.7 |
| Cascade RCNN | 69.3 | 75.3 | 69.7 | 236.0 | 69.2 | 533.0 |
| DINO R-50 | 65.9 | 75.2 | 68.9 | 274.0 | 47.6 | 602.9 |
| YOLOV5s | 77.3 | 76.1 | 79.8 | 4.2 | 1.8 | 3.8 |
| YOLOV7-tiny | 79.6 | 76.7 | 80.6 | 13.1 | 6.0 | 11.7 |
| YOLOV10n | 83.0 | 74.0 | 80.9 | 6.5 | 2.3 | 5.7 |
| YOLO11n | 80.8 | 77.3 | 81.8 | 6.3 | 2.6 | 5.5 |
| YOLOV12n | 82.3 | 78.0 | 83.2 | 5.8 | 2.5 | 5.2 |
| YOLOV13n | 82.6 | 73.0 | 80.9 | 6.2 | 2.5 | 5.2 |
| Hyper-YOLO | 82.8 | 76.1 | 82.3 | 11.0 | 3.9 | 7.8 |
| YOLOV8n | 81.3 | 75.4 | 82.1 | 8.1 | 3.0 | 6.2 |
| 本文模型 | 83.3 | 79.3 | 84.7 | 7.5 | 3.3 | 6.7 |
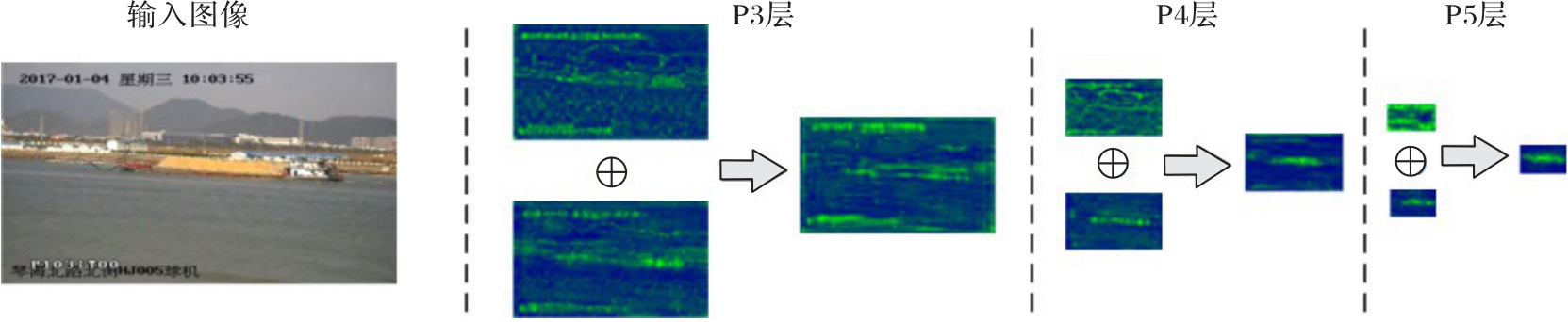
图7 CGLGAFB特征融合的可视化
Fig. 7 Visualization of CGLGAFB feature fusion
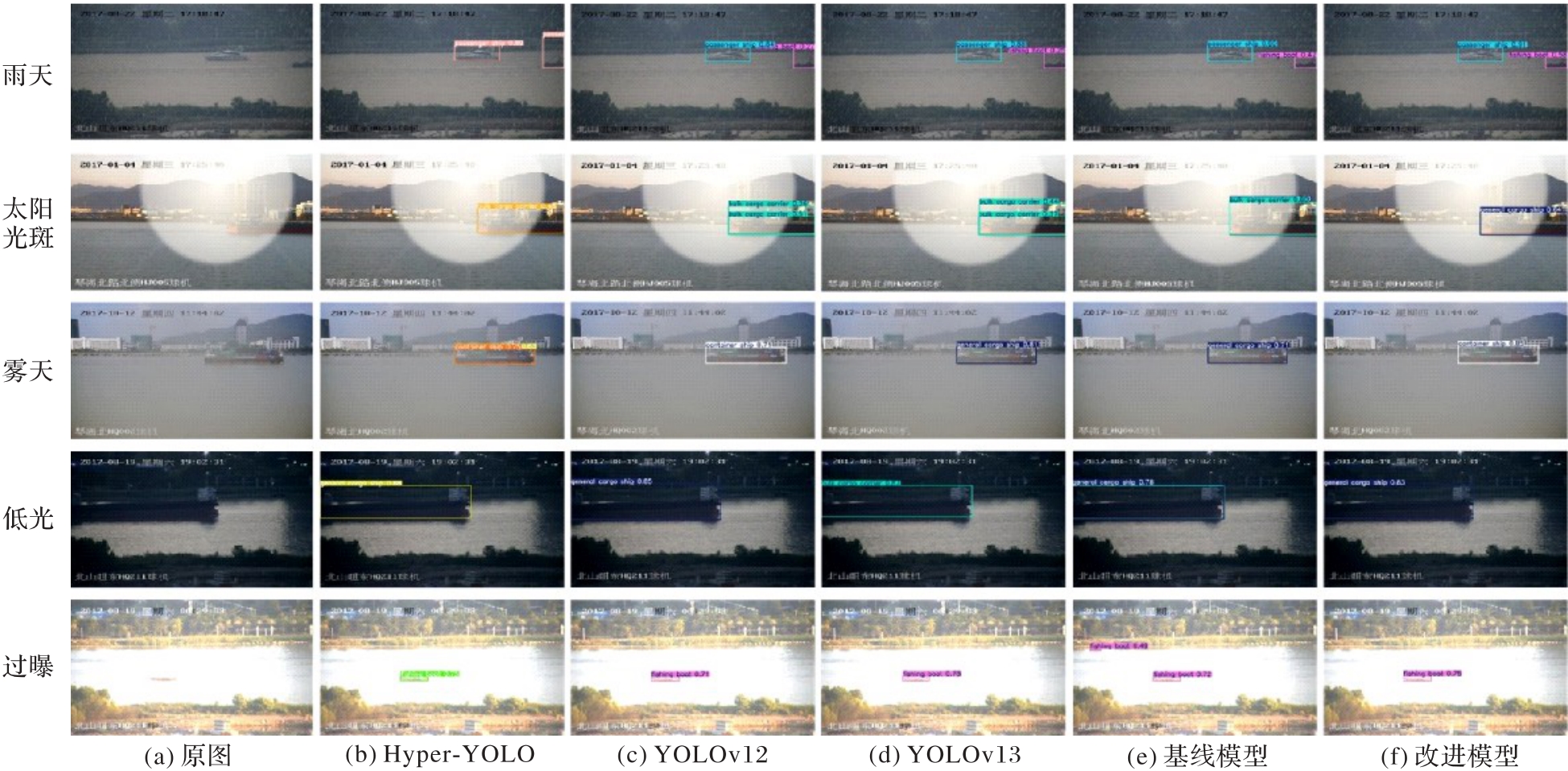
图8 不同模型检测结果的对比
Fig. 8 Comparison of detection results among different models
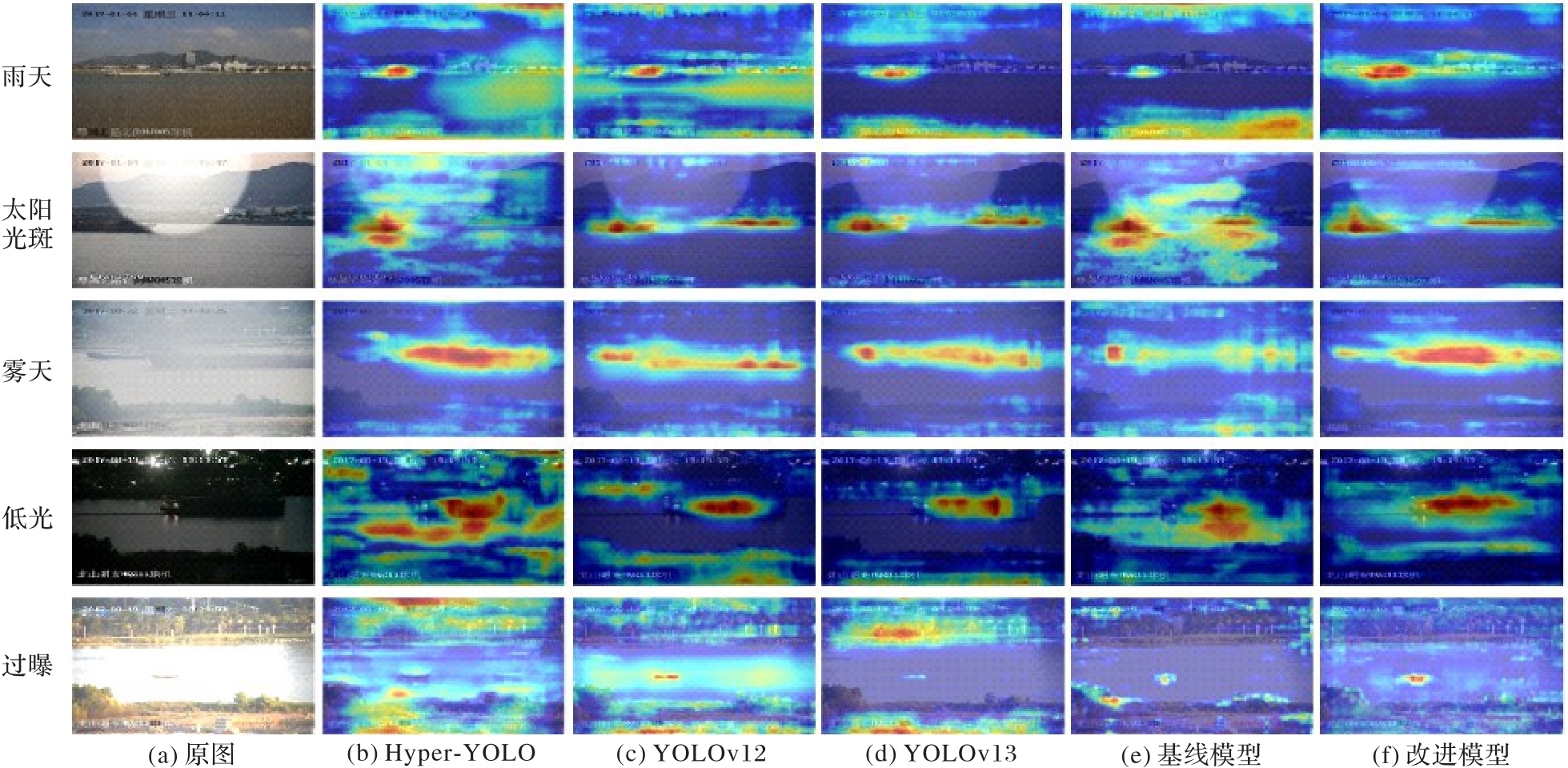
图9 不同模型的热力学结果对比
Fig. 9 Comparison of thermodynamic results among different models
| [1] | XU Q, LI Y, ZHANG M, et al. COCO-Net: a dual-supervised network with unified ROI-loss for low-resolution ship detection from optical satellite image sequences[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5629115. |
| [2] | LIU R W, YUAN W, CHEN X, et al. An enhanced CNN-enabled learning method for promoting ship detection in maritime surveillance system[J]. Ocean Engineering, 2021, 235: No.109435. |
| [3] | CHEN X, WEI C, XIN Z, et al. Ship detection under low-visibility weather interference via an ensemble generative adversarial network[J]. Journal of Marine Science and Engineering, 2023, 11(11): No.2065. |
| [4] | LIU T, ZHANG Z, LEI Z, et al. An approach to ship target detection based on combined optimization model of dehazing and detection[J]. Engineering Applications of Artificial Intelligence, 2024, 127(Pt B): No.107332. |
| [5] | GUO J, FENG H, XU H, et al. D3-Net: integrated multi-task convolutional neural network for water surface deblurring, dehazing and object detection[J]. Engineering Applications of Artificial Intelligence, 2023, 117(Pt A): No.105558. |
| [6] | YU M, HAN S, WANG T, et al. An approach to accurate ship image recognition in a complex maritime transportation environment[J]. Journal of Marine Science and Engineering, 2022, 10(12): No.1903. |
| [7] | 龙翔,陈华杰,吴浩宇,等. 基于特征增强的海面强干扰目标检测[J]. 激光与光电子学进展, 2025, 62(2): No.0212008. |
| LONG X, CHEN H J, WU H Y, et al. Strong interference target detection on the sea surface based on feature augmentation[J]. Laser and Optoelectronics Progress, 2025, 62(2): No.0212008. | |
| [8] | 李承烨,张震,梁哲恒,等. 目标检测模型综述[J]. 计算机研究与发展, 2025, 62(12): 2895-2928. |
| LI C Y, ZHANG Z, LIANG Z H, et al. A survey on object detection models[J]. Journal of Computer Research and Development, 2025, 62(12): 2895-2928. | |
| [9] | 武雨田,李擎,孙文蔚,等. 复杂天气下车载激光点云目标检测方法综述[J]. 工程科学学报, 2025, 47(5): 1081-1093. |
| WU Y T, LI Q, SUN W W, et al. Overview of object detection methods based on LiDAR point cloud under adverse weather conditions[J]. Chinese Journal of Engineering, 2025, 47(5): 1081-1093. | |
| [10] | 杜宏,顾宸瑜,张孝峥,等. 基于YOLOv10-vehicle算法的复杂天气情况下车辆目标检测方法[J]. 吉林大学学报(工学版), 2025, 55(10): 3309-3318. |
| DU H, GU C Y, ZHANG X Z, et al. Vehicle target detection method based on the YOLOv10-vehicle algorithm under complex weather conditions[J]. Journal of Jilin University (Engineering and Technology Edition), 2025, 55(10): 3309-3318. | |
| [11] | 王新蕾,王硕,翟嘉政,等. 多任务联合学习下的复杂天气航拍图像目标检测算法[J]. 计算机工程与应用, 2025, 61(2): 97-111. |
| WANG X L, WANG S, ZHAI J Z, et al. Object detection algorithm of aerial image in complex weather based on multi-task joint learning[J]. Computer Engineering and Applications, 2025, 61(2): 97-111. | |
| [12] | 吕中亮,夏可文,卢震宇,等. 密集特征加权融合网络用于复杂天气下的绝缘子表面缺陷检测[J]. 高电压技术, 2025, 51(3): 1114-1125. |
| LYU Z L, XIA K W, LU Z Y, et al. Weather-robust insulator surface defect detection with dense feature weighted fusion network[J]. High Voltage Engineering, 2025, 51(3): 1114-1125. | |
| [13] | FENG C J, ZHONG Y, GAO Y, et al. TOOD: task-aligned one-stage object detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3490-3499. |
| [14] | 董甲东,桑飞虎,郭庆虎,等. 基于深度学习的目标检测算法轻量化研究综述[J]. 计算机科学与探索, 2025, 19(8): 2057-2084. |
| DONG J D, SANG F H, GUO Q H, et al. Review of lightweight object detection algorithms based on deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2025, 19(8): 2057-2084. | |
| [15] | 王宁,智敏. 深度学习下的单阶段通用目标检测算法研究综述[J]. 计算机科学与探索, 2025, 19(5): 1115-1140. |
| WANG N, ZHI M. Review of one-stage universal object detection algorithms in deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2025, 19(5): 1115-1140. | |
| [16] | SUNKARA R, LUO T. No more strided convolutions or pooling: a new CNN building block for low-resolution images and small objects[C]// Proceedings of the 2023 Joint European Conference on Machine Learning and Knowledge Discovery in Databases, LNCS 13715. Cham: Springer, 2023: 443-459. |
| [17] | 熊珍凯,程晓强,吴幼冬,等. 基于激光雷达的无人驾驶3D多目标跟踪[J]. 自动化学报, 2023, 49(10): 2073-2083. |
| XIONG Z K, CHENG X Q, WU Y D, et al. LiDAR-based 3D multi-object tracking for unmanned vehicles[J]. Acta Automatica Sinica, 2023, 49(10): 2073-2083. | |
| [18] | 卓力,于婉婷,贾童瑶,等. 基于Transformer的遥感图像变化检测研究进展[J]. 北京工业大学学报, 2025, 51(7): 851-866. |
| ZHUO L, YU W T, JIA T Y, et al. Research progress of Transformer-based remote sensing image change detection[J]. Journal of Beijing University of Technology, 2025, 51(7): 851-866. | |
| [19] | 李沂杨,陆声链,王继杰,等. 基于Transformer的DETR目标检测算法研究综述[J]. 计算机工程, 2026, 52(4): 62-81. |
| LI Y Y, LU S L, WANG J J, et al. Review of DETR object detection algorithm based on Transformer[J]. Computer Engineering, 2026, 52(4): 62-81. | |
| [20] | CHENG S, ZHU Y, WU S. Deep learning based efficient ship detection from drone-captured images for maritime surveillance[J]. Ocean Engineering, 2023, 285(Pt 2): No.115440. |
| [21] | 王微,郁强,王五桂,等. YOLOv7-F:一种轻量级船舶实时检测算法[J].兵器装备工程学报, 2024, 45(11): 11-18. |
| WANG W, YU Q, WANG W G, et al. YOLOv7-F: alight weight real-time ship detection algorithm[J]. Journal of Ordnance Equipment Engineering, 2024, 45(11): 11-18. | |
| [22] | ZHANG Y, CHEN W, LI S, et al. YOLO-Ships: lightweight ship object detection based on feature enhancement[J]. Journal of Visual Communication and Image Representation, 2024, 101: No.104170. |
| [23] | 梁娟,王凯,李小霞. 海面船舶小目标检测的正交子空间投影算法[J]. 机械设计与制造, 2025(10): 83-89, 97. |
| LIANG J, WANG K, LI X X. Small target detection for ships on the sea surface based on orthogonal subspace projection algorithm[J]. Machinery Design and Manufacture, 2025(10): 83-89, 97. | |
| [24] | XU S, ZHENG S, XU W, et al. HCF-Net: hierarchical context fusion network for infrared small object detection [C]// Proceedings of the 2024 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2024: 1-6. |
| [25] | SHAO Y. Local-Global Attention: an adaptive mechanism for multi-scale feature integration[EB/OL]. [2025-08-31].. |
| [26] | WANG C Y, MARK LIAO H Y, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]// Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2020: 1571-1580. |
| [27] | YU W, SI C, ZHOU P, et al. MetaFormer baselines for vision[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(2): 896-912. |
| [28] | SHI D. TransNeXt: robust foveal visual perception for vision Transformers[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 17773-17783. |
| [29] | SHAO Z, WU W, WANG Z, et al. SeaShips: a large-scale precisely annotated dataset for ship detection[J]. IEEE Transactions on Multimedia, 2018, 20(10): 2593-2604. |
| [1] | 何丽丽, 曹勐, 张磊, 潘洪军, 刘义, 孙成心. 基于Kolmogorov-Arnold网络与扩散Transformer的手语生成模型[J]. 《计算机应用》唯一官方网站, 2026, 46(6): 1801-1810. |
| [2] | 杜艺, 续明进, 孔佳仪, 王力瑶, 赵晨. 基于YOLOv11的低秩自适应参数高效微调算法[J]. 《计算机应用》唯一官方网站, 2026, 46(6): 1738-1745. |
| [3] | 盛兴, 翁孙贤, 陈扩松, 王忠平, 任芮锋, 刘勇. 基于深度学习的电网企业专利价值评估[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1468-1474. |
| [4] | 郭慧洁, 窦天凤, 张振琳, 亓开元, 吴栋, 曲志坚, 李钊, 任崇广. 基于时间依赖建模的动态贝叶斯网络交通预测[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1507-1517. |
| [5] | 刘馨瑶, 梁军, 龙嘉濠, 颜仁梁. 基于特征融合和通道信息补偿的中草药细粒度图像分类[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1677-1683. |
| [6] | 陈浩轩, 叶培昌, 刘磊, 刘承明, 胡文华. 自动代码编辑推荐综述[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1227-1237. |
| [7] | 余松森, 何皇, 薛国鹏, 崔恒拓. 基于改进FENet的瓷砖色差量化分级方法[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 959-968. |
| [8] | 张健, 于剑波, 汤健. 基于多层预处理的城市固废焚烧状态识别方法[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 940-949. |
| [9] | 陈敏, 秦小林, 李绍涵, 杨昊, 李韬弘. 深度学习应用于强对流天气预测的综述[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 980-992. |
| [10] | 姜勇维, 陈晓清, 付麟杰. 基于频谱分解的高频保持医学图像弹性配准模型[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 924-932. |
| [11] | 姜皓骞, 张东, 李冠宇, 陈恒. 基于结构增强的层次化任务导向提示策略的对话推荐系统SetaCRS[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 368-377. |
| [12] | 韩锋, 卜永丰, 梁浩翔, 黄舒雯, 张朝阳, 孙士杰. 基于多层次时空交互依赖的车辆轨迹异常检测[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 604-612. |
| [13] | 陈晓雷, 郑芷薇, 黄雪, 曲振彬. 结合球面对齐与自适应几何校正的全景视频超分辨率网络[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 528-535. |
| [14] | 刘权捷, 顾兆一, 王春源. 复杂光照条件下的不安全驾驶行为检测[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 613-619. |
| [15] | 林金娇, 张灿舜, 陈淑娅, 王天鑫, 连剑, 徐庸辉. 基于改进图注意力网络的车险欺诈检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 437-444. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||