


《计算机应用》唯一官方网站 ›› 2021, Vol. 41 ›› Issue (11): 3242-3250.DOI: 10.11772/j.issn.1001-9081.2021020327
所属专题: 人工智能
高洁1, 朱元2( ), 陆科2
), 陆科2
收稿日期:2021-03-05
修回日期:2021-04-15
接受日期:2021-04-20
发布日期:2021-04-29
出版日期:2021-11-10
通讯作者:
朱元
作者简介:高洁(1996—),女,贵州六盘水人,硕士研究生,主要研究方向:多传感器融合、多目标跟踪、目标检测Received:2021-03-05
Revised:2021-04-15
Accepted:2021-04-20
Online:2021-04-29
Published:2021-11-10
Contact:
Yuan ZHU
About author:GAO Jie,born in 1996,M. S. candidate. Her research interests
include multi-sensor fusion,multi-object tracking,object detection摘要:
在自动驾驶感知系统中,为了提高感知结果的可靠度,通常采用多传感器融合的方法。针对融合感知系统中的目标检测任务,提出了基于雷达和相机融合的目标检测方法——PRRPN,旨在使用雷达测量和前一帧目标检测结果来改进图像检测网络中的候选区域生成,并提高目标检测性能。首先,将前一帧检测到的目标与当前帧中的雷达点进行关联,以实现雷达预分类。然后,将预分类后的雷达点投影到图像中,并根据雷达的距离和雷达散射截面积(RCS)信息获得相应的先验候选区域和雷达候选区域。最后,根据候选区域进行目标边界框的回归和分类。此外,还将PRRPN与区域生成网络(RPN)融合到一起来进行目标检测。使用新发布的nuScenes数据集来对三种检测方法进行测试评估。实验结果表明,与RPN相比,PRRPN不仅可以更快速地实现目标检测,而且还使得小目标的平均检测精度提升了2.09个百分点;而将所提PRRPN与RPN进行融合的方法,与单独使用PRRPN和RPN相比,平均检测精度分别提升了2.54个百分点和0.34个百分点。
中图分类号:
高洁, 朱元, 陆科. 基于雷达和相机融合的目标检测方法[J]. 计算机应用, 2021, 41(11): 3242-3250.
Jie GAO, Yuan ZHU, Ke LU. Object detection method based on radar and camera fusion[J]. Journal of Computer Applications, 2021, 41(11): 3242-3250.
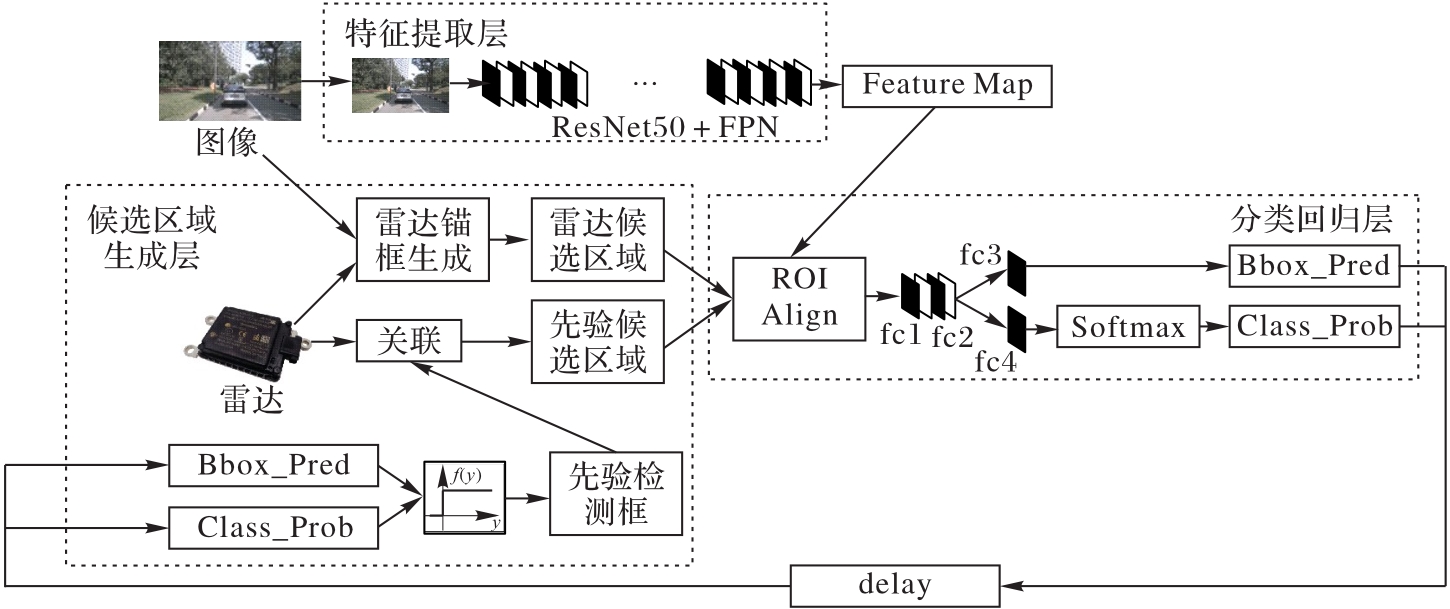
图1 PRRPN的检测网络结构
Fig. 1 Detection network structure of PRRPN
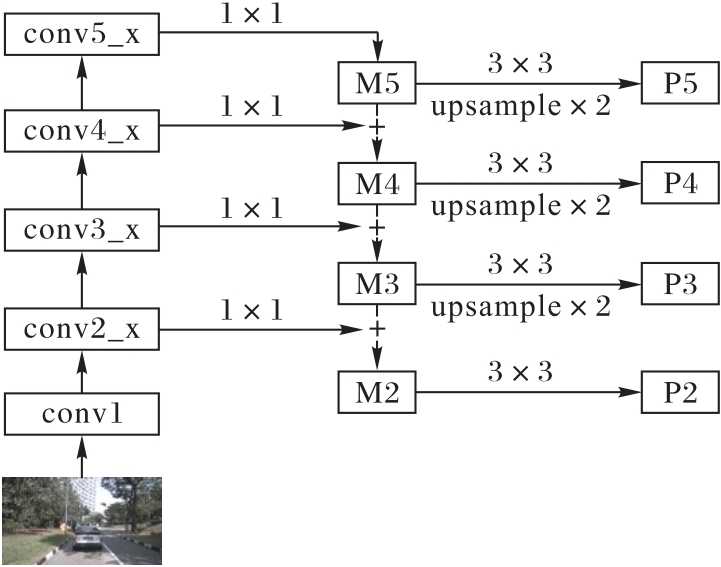
图2 特征提取层网络结构
Fig. 2 Network structure of feature extraction layer
| 层级名称 | 层级结构 | Stride |
|---|---|---|
| conv1 | 7×7, 64 | 2 |
| conv2_x | 3×3 max pool, | 2 |
| 1 | ||
| conv3_x | 1 | |
| conv4_x | 1 | |
| conv5_x | 1 |
表1 ResNet50结构参数
Tab. 1 Structural parameters of ResNet50
| 层级名称 | 层级结构 | Stride |
|---|---|---|
| conv1 | 7×7, 64 | 2 |
| conv2_x | 3×3 max pool, | 2 |
| 1 | ||
| conv3_x | 1 | |
| conv4_x | 1 | |
| conv5_x | 1 |
| 层级名称 | 输入尺寸 | 输出尺寸 |
|---|---|---|
| fc1 | 12 544 | 1 024 |
| fc2 | 1 024 | 1 024 |
| fc3(Bbox_Pred) | 1 024 | 24 |
| fc4(Class_Prob) | 1 024 | 7 |
表2 全连接层参数
Tab. 2 Parameters of fully connected layer
| 层级名称 | 输入尺寸 | 输出尺寸 |
|---|---|---|
| fc1 | 12 544 | 1 024 |
| fc2 | 1 024 | 1 024 |
| fc3(Bbox_Pred) | 1 024 | 24 |
| fc4(Class_Prob) | 1 024 | 7 |
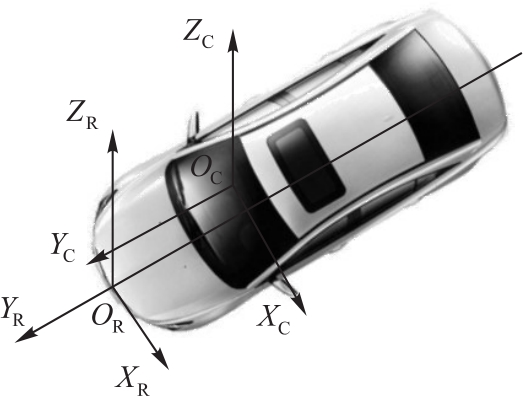
图3 雷达坐标系和相机坐标系示意图
Fig. 3 Schematic diagram of radar coordinate system and camera coordinate system
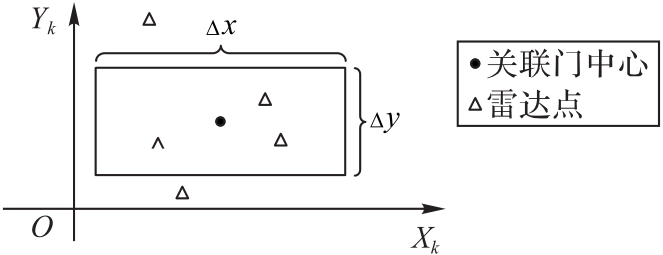
图4 关联门
Fig. 4 Association gate
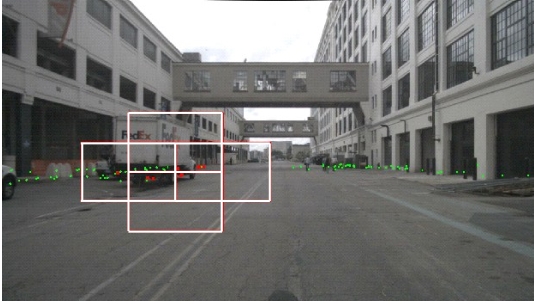
图5 先验候选区域生成
Fig. 5 Generation of prior region proposals
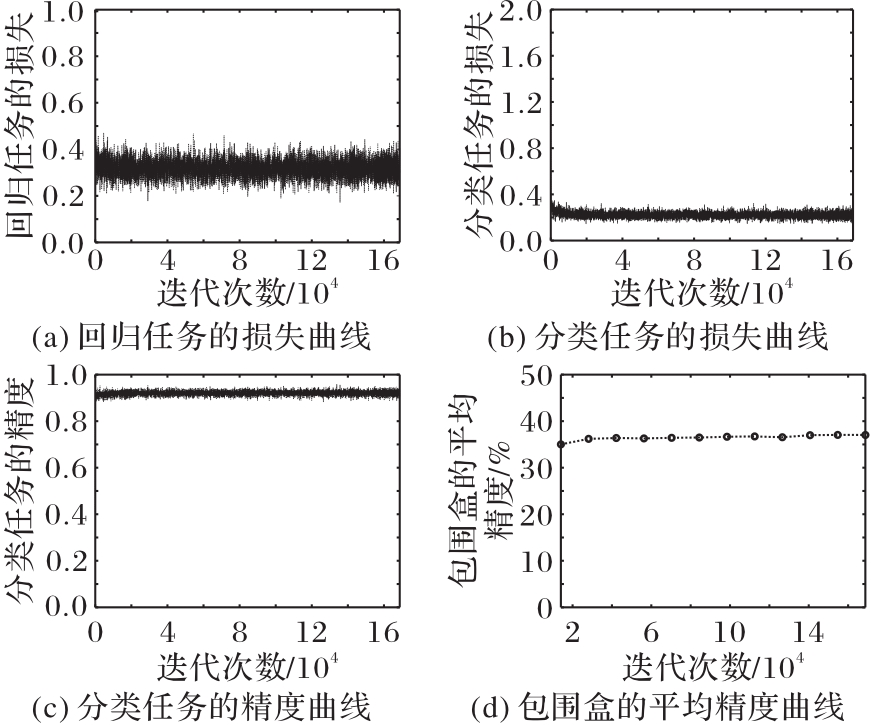
图6 训练过程收敛曲线
Fig. 6 Convergence curves of training process
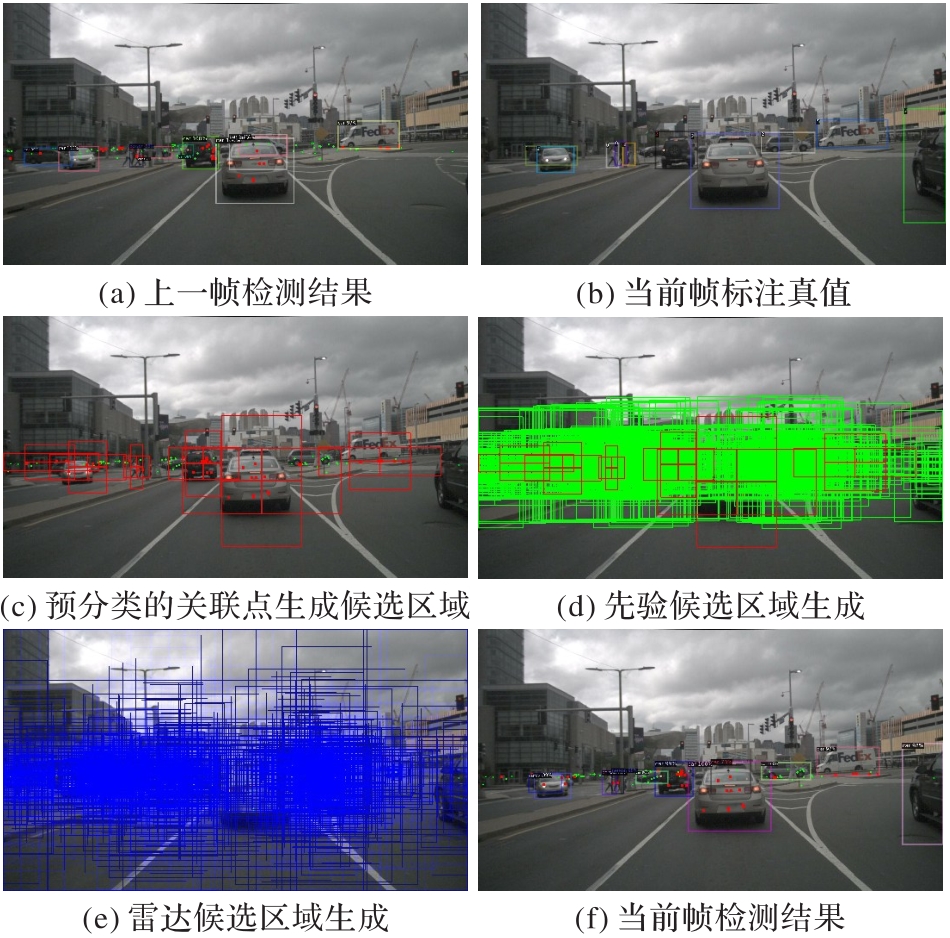
图7 PRRPN检测示意图
Fig. 7 Schematic diagram of PRRPN detection
| 指标 | 含义 |
|---|---|
| AP | 平均准确度,检测结果中正确结果所占比例 |
| AP50 | IoU = 0.50的检测结果的AP |
| AP75 | IoU = 0.75的检测结果的AP |
| APS | 面积 |
| APM | 322 < 面积 < 962的中等目标的AP |
| APL | 面积 |
| AR | 平均召回率,测试集中所有正样本样例中被正确检测的比例 |
| AR10 | 测试集每张图像中每10个目标中的最大召回的平均值 |
| AR100 | 测试集每张图像中每100个目标中的最大召回的平均值 |
| ARS | 面积 |
| ARM | 322 < 面积 < 962的中等目标的AR |
| ARL | 面积 |
表1 实验用评价指标及其含义
Tab. 1 Evaluation indexes for experiment and their meanings
| 指标 | 含义 |
|---|---|
| AP | 平均准确度,检测结果中正确结果所占比例 |
| AP50 | IoU = 0.50的检测结果的AP |
| AP75 | IoU = 0.75的检测结果的AP |
| APS | 面积 |
| APM | 322 < 面积 < 962的中等目标的AP |
| APL | 面积 |
| AR | 平均召回率,测试集中所有正样本样例中被正确检测的比例 |
| AR10 | 测试集每张图像中每10个目标中的最大召回的平均值 |
| AR100 | 测试集每张图像中每100个目标中的最大召回的平均值 |
| ARS | 面积 |
| ARM | 322 < 面积 < 962的中等目标的AR |
| ARL | 面积 |
| 候选框生成方法 | AP | AP50 | AP75 | APS | APM | APL |
|---|---|---|---|---|---|---|
| PRRPN | 34.49 | 60.95 | 35.05 | 7.75 | 24.03 | 46.28 |
| RPN | 36.69 | 66.99 | 36.72 | 5.66 | 28.76 | 47.74 |
| PRRPN+RPN | 37.03 | 64.90 | 38.54 | 5.90 | 29.17 | 47.68 |
表2 不同检测方法的AP (%)
Tab. 2 APs of different detection methods
| 候选框生成方法 | AP | AP50 | AP75 | APS | APM | APL |
|---|---|---|---|---|---|---|
| PRRPN | 34.49 | 60.95 | 35.05 | 7.75 | 24.03 | 46.28 |
| RPN | 36.69 | 66.99 | 36.72 | 5.66 | 28.76 | 47.74 |
| PRRPN+RPN | 37.03 | 64.90 | 38.54 | 5.90 | 29.17 | 47.68 |
| 候选框生成方法 | AR | AR10 | AR100 | ARS | ARM | ARL |
|---|---|---|---|---|---|---|
| PRRPN | 0.268 | 0.428 | 0.433 | 0.101 | 0.335 | 0.543 |
| RPN | 0.290 | 0.476 | 0.488 | 0.242 | 0.433 | 0.569 |
| PRRPN+RPN | 0.292 | 0.478 | 0.490 | 0.249 | 0.435 | 0.568 |
表3 不同检测方法的AR
Tab. 3 ARs of different detection methods
| 候选框生成方法 | AR | AR10 | AR100 | ARS | ARM | ARL |
|---|---|---|---|---|---|---|
| PRRPN | 0.268 | 0.428 | 0.433 | 0.101 | 0.335 | 0.543 |
| RPN | 0.290 | 0.476 | 0.488 | 0.242 | 0.433 | 0.569 |
| PRRPN+RPN | 0.292 | 0.478 | 0.490 | 0.249 | 0.435 | 0.568 |
候选框 生成方法 | 人 | 自行车 | 小汽车 | 摩托车 | 公共汽车 | 卡车 |
|---|---|---|---|---|---|---|
| PRRPN | 13.51 | 24.38 | 45.85 | 24.19 | 60.94 | 38.08 |
| RPN | 19.33 | 25.65 | 50.05 | 18.07 | 66.16 | 40.89 |
| PRRPN + RPN | 18.88 | 26.10 | 50.19 | 19.36 | 66.59 | 41.08 |
表4 不同检测方法检测到的各种类的AP (%)
Tab. 4 APs of different detection methods for different classes
候选框 生成方法 | 人 | 自行车 | 小汽车 | 摩托车 | 公共汽车 | 卡车 |
|---|---|---|---|---|---|---|
| PRRPN | 13.51 | 24.38 | 45.85 | 24.19 | 60.94 | 38.08 |
| RPN | 19.33 | 25.65 | 50.05 | 18.07 | 66.16 | 40.89 |
| PRRPN + RPN | 18.88 | 26.10 | 50.19 | 19.36 | 66.59 | 41.08 |
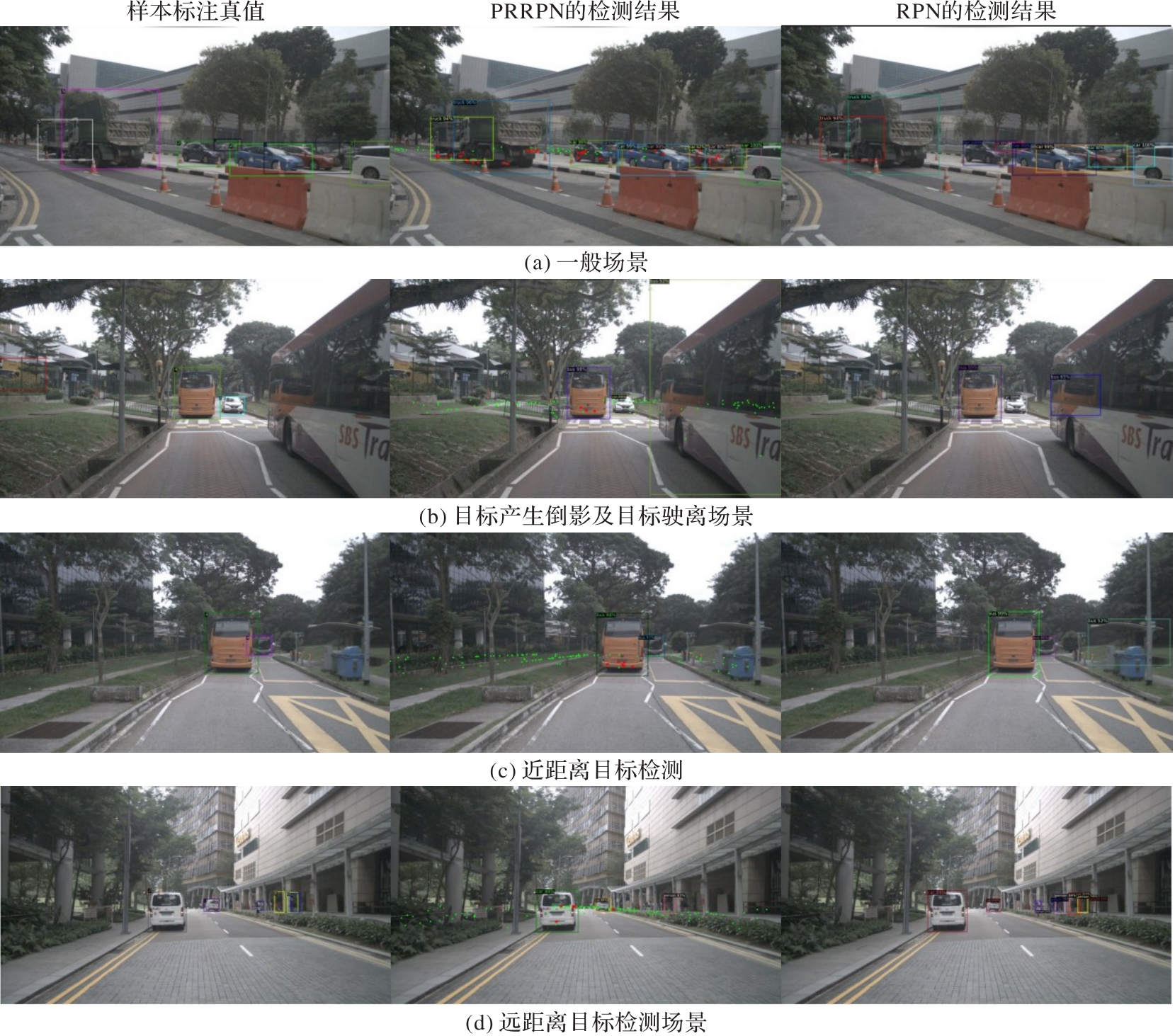
图8 PRRPN和RPN检测结果对比
Fig. 8 Comparison of PRRPN and RPN detection results

图9 PRRPN+RPN和RPN的检测结果对比
Fig. 9 Detection result comparison of PRRPN+RPN and RPN
| 1 | SOVIANY P, IONESCU R T. Optimizing the trade-off between single-stage and two-stage deep object detectors using image difficulty prediction [C]// Proceedings of the 2018 20th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing. Piscataway: IEEE, 2018: 209-214. 10.1109/synasc.2018.00041 |
| 2 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 3 | WEI L, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS9905. Cham: Springer, 2016: 21-37. |
| 4 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6517-6525. 10.1109/cvpr.2017.690 |
| 5 | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. (2018-04-08) [2020-12-04].. 10.1109/cvpr.2018.00430 |
| 6 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. 10.1109/cvpr.2014.81 |
| 7 | GIRSHICK R. Fast R-CNN [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1440-1448. 10.1109/iccv.2015.169 |
| 8 | REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [C]// Proceedings of the 2015 28th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2015:91-99. |
| 9 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. 10.1109/iccv.2017.322 |
| 10 | CAESAR H, BANKITI V, LANG A H, et al. nuScenes: a multimodal dataset for autonomous driving [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11618-11628. 10.1109/cvpr42600.2020.01164 |
| 11 | ZHANG R Y, CAO S Y. Extending reliability of mmwave radar tracking and detection via fusion with camera [J]. IEEE Access, 2019, 7: 137065-137079. 10.1109/access.2019.2942382 |
| 12 | KIM T L, LEE J S, PARK T H, et al. Fusing lidar, radar, and camera using extended Kalman filter for estimating the forward position of vehicles [C]// Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems/ IEEE Conference on Robotics, Automation and Mechatronics. Piscataway: IEEE, 2019: 374-379. 10.1109/cis-ram47153.2019.9095859 |
| 13 | KIM K E, LEE C J, PAE D S, et al. Sensor fusion for vehicle tracking with camera and radar sensor [C]// Proceedings of the 2017 17th International Conference on Control, Automation and Systems. Piscataway: IEEE, 2017: 1075-1077. 10.23919/iccas.2017.8204375 |
| 14 | JANG Y S, PARK S K, LIM M T. Sensor fusion and compensation algorithm for vehicle tracking with front camera and corner radar sensors [C]// Proceedings of the 2019 19th International Conference on Control, Automation and Systems. Piscataway: IEEE, 2019: 575-578. 10.23919/iccas47443.2019.8971685 |
| 15 | JIANG Q Y, ZHANG L J, MENG D J. Target detection algorithm based on MMW radar and camera fusion [C]// Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference. Piscataway: IEEE, 2019: 1-6. 10.1109/itsc.2019.8917504 |
| 16 | REN J X, WANG Y, HAN Y B, et al. Information fusion of digital camera and radar [C]// Proceedings of the 2019 IEEE MTT-S International Microwave Biomedical Conference. Piscataway: IEEE, 2019: 1-4. 10.1109/imbioc.2019.8777799 |
| 17 | JHA H, LODHI V, CHAKRAVARTY D. Object detection and identification using vision and radar data fusion system for ground-based navigation [C]// Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks. Piscataway: IEEE, 2019: 590-593. 10.1109/spin.2019.8711717 |
| 18 | LEKIC V, BABIC Z. Automotive radar and camera fusion using generative adversarial networks [J]. Computer Vision and Image Understanding, 2019, 184: 1-8. 10.1016/j.cviu.2019.04.002 |
| 19 | NOBIS F, GEISSLINGER M, WEBER M, et al. A deep learning-based radar and camera sensor fusion architecture for object detection [C]// Proceedings of the 2019 Sensor Data Fusion: Trends, Solutions, Applications. Piscataway: IEEE, 2019: 39-45. 10.1109/sdf.2019.8916629 |
| 20 | CHADWICK S, MADDERN W, NEWMAN P. Distant vehicle detection using radar and vision [C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 8311-8317. 10.1109/icra.2019.8794312 |
| 21 | MEYER M, KUSCHK G. Deep learning based 3D object detection for automotive radar and camera [C]// Proceedings of the 2019 16th European Radar Conference. Piscataway: IEEE, 2019:133-136. |
| 22 | JI Z P, PROKHOROV D. Radar-vision fusion for object classification [C]// Proceedings of the 2008 11th International Conference on Information Fusion. Piscataway: IEEE, 2008: 1-7. |
| 23 | KOCIĆ J, JOVIČIĆ N, DRNDAREVIĆ V. Sensors and sensor fusion in autonomous vehicles [C]// Proceedings of the 2018 26th Telecommunications Forum. Piscataway: IEEE, 2018: 420-425. 10.1109/telfor.2018.8612054 |
| 24 | HAN S Y, WANG X, XU L H, et al. Frontal object perception for intelligent vehicles based on radar and camera fusion [C]// Proceedings of the 2016 35th Chinese Control Conference. Piscataway: IEEE, 2016: 4003-4008. 10.1109/chicc.2016.7553978 |
| 25 | ZHANG X Y, ZHOU M, QIU P, et al. Radar and vision fusion for the real-time obstacle detection and identification [J]. Industrial Robot, 2019, 46(3): 391-395. 10.1108/ir-06-2018-0113 |
| 26 | CHAVEZ-GARCIA R O, AYCARD O. Multiple sensor fusion and classification for moving object detection and tracking [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 525-534. 10.1109/tits.2015.2479925 |
| 27 | BAIG Q, AYCARD O, VU T D, et al. Fusion between laser and stereo vision data for moving objects tracking in intersection like scenario [C]// Proceedings of the 2011 IEEE Intelligent Vehicles Symposium. Piscataway: IEEE, 2011: 362-367. 10.1109/ivs.2011.5940576 |
| 28 | BAR-SHALOM Y, TSE E. Tracking in a cluttered environment with probabilistic data association [J]. Automatica, 1975, 11(5): 451-460. 10.1016/0005-1098(75)90021-7 |
| 29 | BAR-SHALOM Y, DAUM F, HUANG J. The probabilistic data association filter [J]. IEEE Control Systems Magazine, 2009, 29(6): 82-100. 10.1109/mcs.2009.934469 |
| 30 | NABATI R, QI H R. RRPN: radar region proposal network for object detection in autonomous vehicles [C]// Proceedings of the 2019 IEEE International Conference on Image Processing. Piscataway: IEEE, 2019: 3093-3097. 10.1109/icip.2019.8803392 |
| 31 | WU Y X, KIRILLOV A, MASSA F, et al. Detectron2 [EB/OL]. [2019-11-09]. . |
| 32 | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context [C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS8693. Cham: Springer, 2014: 740-755. |
| 33 | 罗俊海,王章静.多源数据融合和传感器管理[M].北京:清华大学出版社,2015:6-11. 10.1002/ecs2.2015.6.issue-11 |
| LUO J H, WANG Z J. Multi-source Data Fusion and Sensor Management [M]. Beijing: Tsinghua University Press, 2015: 6-11. 10.1002/ecs2.2015.6.issue-11 | |
| 34 | 何友,修建娟,关欣.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013:87-90. |
| HE Y, XIU J J, GUAN X. Radar Data Processing with Applications [M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 87-90. |
| [1] | 杨兴耀, 陈羽, 于炯, 张祖莲, 陈嘉颖, 王东晓. 结合自我特征和对比学习的推荐模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2704-2710. |
| [2] | 秦璟, 秦志光, 李发礼, 彭悦恒. 基于概率稀疏自注意力神经网络的重性抑郁疾患诊断[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2970-2974. |
| [3] | 方介泼, 陶重犇. 应对零日攻击的混合车联网入侵检测系统[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2763-2769. |
| [4] | 杨航, 李汪根, 张根生, 王志格, 开新. 基于图神经网络的多层信息交互融合算法用于会话推荐[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2719-2725. |
| [5] | 姚光磊, 熊菊霞, 杨国武. 基于神经网络优化的花朵授粉算法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2829-2837. |
| [6] | 黄颖, 杨佳宇, 金家昊, 万邦睿. 用于RGBT跟踪的孪生混合信息融合算法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2878-2885. |
| [7] | 杜郁, 朱焱. 构建预训练动态图神经网络预测学术合作行为消失[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2726-2731. |
| [8] | 王娜, 蒋林, 李远成, 朱筠. 基于图形重写和融合探索的张量虚拟机算符融合优化[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2802-2809. |
| [9] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [10] | 李云, 王富铕, 井佩光, 王粟, 肖澳. 基于不确定度感知的帧关联短视频事件检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2903-2910. |
| [11] | 唐廷杰, 黄佳进, 秦进. 基于图辅助学习的会话推荐[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2711-2718. |
| [12] | 张睿, 张鹏云, 高美蓉. 自优化双模态多通路非深度前庭神经鞘瘤识别模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2975-2982. |
| [13] | 张春雪, 仇丽青, 孙承爱, 荆彩霞. 基于两阶段动态兴趣识别的购买行为预测模型[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2365-2371. |
| [14] | 陈彤, 杨丰玉, 熊宇, 严荭, 邱福星. 基于多尺度频率通道注意力融合的声纹库构建方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2407-2413. |
| [15] | 石锐, 李勇, 朱延晗. 基于特征梯度均值化的调制信号对抗样本攻击算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2521-2527. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||