


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (10): 3202-3208.DOI: 10.11772/j.issn.1001-9081.2023020119
所属专题: 多媒体计算与计算机仿真
郝雯( ), 汪洋, 魏海南
), 汪洋, 魏海南
收稿日期:2023-02-15
修回日期:2023-04-03
接受日期:2023-04-07
发布日期:2023-08-14
出版日期:2023-10-10
通讯作者:
郝雯
作者简介:汪洋(1998—),男,安徽合肥人,硕士研究生,主要研究方向:点云场景分割基金资助:
Wen HAO(), Yang WANG, Hainan WEI
Received:2023-02-15
Revised:2023-04-03
Accepted:2023-04-07
Online:2023-08-14
Published:2023-10-10
Contact:
Wen HAO
About author:WANG Yang,born in 1998, M. S. candidate. His research interests include point cloud scene segmentation.Supported by:摘要:
为挖掘特征间的语义关系以及空间分布信息,并通过多特征增强进一步改善点云语义分割的效果,提出一种基于多特征融合的点云场景语义分割网络(MFF-Net)。所提网络以点的三维坐标和改进后的边特征作为输入,首先,利用K-近邻(KNN)算法搜寻点的近邻点,并在三维坐标和近邻点间坐标差值的基础上计算几何偏移量,从而增强点的局部几何特征表示;其次,将中心点与近邻点间的距离作为权重信息更新边特征,并引入空间注意力机制,获取特征间的语义信息;再次,通过计算近邻特征间的差值,利用均值池化操作进一步提取特征间的空间分布信息;最后,利用注意力池化操作融合三边特征。实验结果表明,所提网络在S3DIS(Stanford 3D large-scale Indoor Spaces)数据集上的平均交并比(mIoU)达到了67.5%,总体准确率(OA)达到了87.2%,相较于PointNet++分别提高10.2和3.4个百分点,可见MFF-Net在大型室内/室外场景均能获得良好的分割效果。
中图分类号:
郝雯, 汪洋, 魏海南. 基于多特征融合的点云场景语义分割[J]. 计算机应用, 2023, 43(10): 3202-3208.
Wen HAO, Yang WANG, Hainan WEI. Semantic segmentation of point cloud scenes based on multi-feature fusion[J]. Journal of Computer Applications, 2023, 43(10): 3202-3208.

图1 MFF-Net的框架
Fig. 1 Framework of MFF-Net
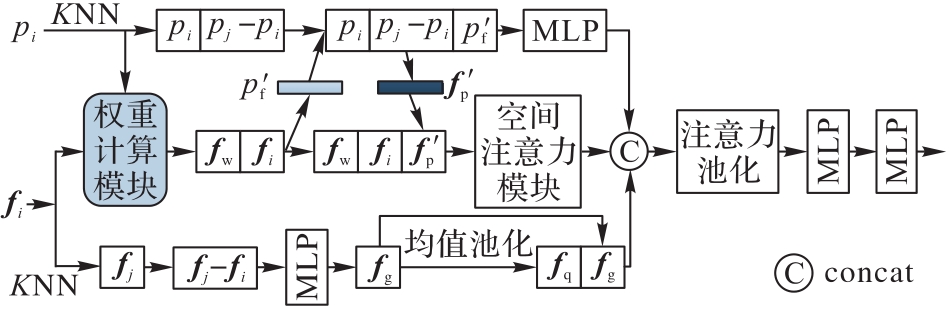
图2 多特征融合模块
Fig. 2 Multi-feature fusion module
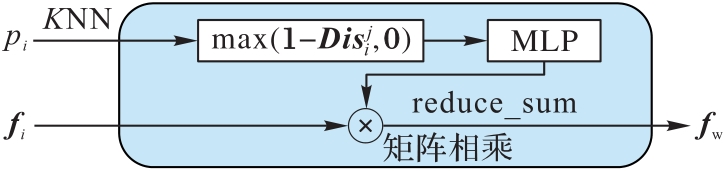
图3 权重计算模块
Fig. 3 Weight computation module
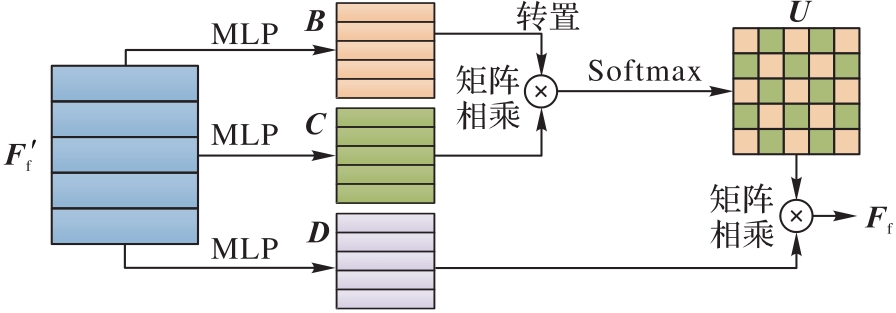
图4 空间注意力模块示意图
Fig. 4 Schematic diagram of spatial attention module
| 网络模型 | mAcc | OA | mIoU | 不同类别物体的分割准确率 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 天花板 | 地板 | 墙 | 梁 | 柱 | 窗户 | 门 | 椅子 | 桌子 | 书柜 | 沙发 | 黑板 | 杂物 | ||||
| PointNet[ | 66.2 | 78.6 | 47.6 | 88.0 | 88.7 | 69.3 | 42.4 | 23.1 | 47.5 | 51.6 | 42.0 | 54.1 | 38.2 | 9.6 | 29.4 | 35.2 |
| PointNet++[ | — | 83.8 | 57.3 | 91.5 | 92.8 | 74.6 | 41.3 | 28.1 | 54.5 | 59.6 | 64.6 | 58.9 | 27.1 | 52.0 | 52.3 | 48.0 |
| RSNet[ | 66.5 | — | 56.5 | 92.5 | 92.8 | 78.6 | 32.8 | 34.4 | 51.6 | 68.1 | 59.7 | 60.1 | 16.4 | 50.2 | 44.9 | 52.0 |
| SPG[ | 73.0 | 86.4 | 62.1 | 89.9 | 95.1 | 76.4 | 62.8 | 47.1 | 55.3 | 68.4 | 73.5 | 69.2 | 63.2 | 45.9 | 8.7 | 52.9 |
| DGCNN[ | — | 84.3 | 56.9 | 92.8 | 93.7 | 76.4 | 53.1 | 35.6 | 56.5 | 61.2 | 64.2 | 51.4 | 15.9 | 48.3 | 43.1 | 47.0 |
| PointWeb[ | 76.2 | 87.3 | 66.7 | 93.5 | 94.2 | 80.8 | 52.4 | 41.3 | 64.9 | 68.1 | 71.4 | 67.1 | 50.3 | 62.7 | 62.2 | 58.5 |
| MPNet[ | — | 86.8 | 61.3 | 94.0 | 94.1 | 76.6 | 53.4 | 33.6 | 54.2 | 62.7 | 70.2 | 60.2 | 36.6 | 53.4 | 54.3 | 53.5 |
| Octant-CNN[ | — | 84.6 | 58.3 | 92.1 | 94.5 | 76.3 | 48.9 | 30.8 | 56.9 | 62.9 | 65.8 | 55.5 | 28 | 48.1 | 50.3 | 48.4 |
| GFSOP-Net[ | 71.0 | 84.1 | 58.5 | — | — | — | — | — | — | — | — | — | — | — | — | — |
| AMFF-DGCNN[ | — | 85.6 | 59.9 | 92.9 | 94.7 | 78.2 | 54.0 | 43.3 | 59.1 | 62.6 | 67.4 | 59.1 | 18.3 | 51.3 | 47.4 | 50.5 |
| BAAFNet[ | 79.4 | 87.1 | 66.6 | 93.7 | 96.9 | 78.7 | 41.0 | 40.2 | 61.1 | 69.0 | 66.0 | 78.3 | 63.4 | 59.9 | 59.1 | 59.2 |
| MFF-Net | 80.0 | 87.2 | 67.5 | 93.5 | 96.9 | 78.3 | 37.0 | 48.0 | 61.8 | 67.8 | 67.4 | 79.2 | 65.5 | 60.2 | 62.2 | 60.1 |
表1 在S3DIS数据集上的6折交叉验证语义分割结果 (%)
Tab. 1 Semantic segmentation results of 6-fold cross-validation on S3DIS dataset
| 网络模型 | mAcc | OA | mIoU | 不同类别物体的分割准确率 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 天花板 | 地板 | 墙 | 梁 | 柱 | 窗户 | 门 | 椅子 | 桌子 | 书柜 | 沙发 | 黑板 | 杂物 | ||||
| PointNet[ | 66.2 | 78.6 | 47.6 | 88.0 | 88.7 | 69.3 | 42.4 | 23.1 | 47.5 | 51.6 | 42.0 | 54.1 | 38.2 | 9.6 | 29.4 | 35.2 |
| PointNet++[ | — | 83.8 | 57.3 | 91.5 | 92.8 | 74.6 | 41.3 | 28.1 | 54.5 | 59.6 | 64.6 | 58.9 | 27.1 | 52.0 | 52.3 | 48.0 |
| RSNet[ | 66.5 | — | 56.5 | 92.5 | 92.8 | 78.6 | 32.8 | 34.4 | 51.6 | 68.1 | 59.7 | 60.1 | 16.4 | 50.2 | 44.9 | 52.0 |
| SPG[ | 73.0 | 86.4 | 62.1 | 89.9 | 95.1 | 76.4 | 62.8 | 47.1 | 55.3 | 68.4 | 73.5 | 69.2 | 63.2 | 45.9 | 8.7 | 52.9 |
| DGCNN[ | — | 84.3 | 56.9 | 92.8 | 93.7 | 76.4 | 53.1 | 35.6 | 56.5 | 61.2 | 64.2 | 51.4 | 15.9 | 48.3 | 43.1 | 47.0 |
| PointWeb[ | 76.2 | 87.3 | 66.7 | 93.5 | 94.2 | 80.8 | 52.4 | 41.3 | 64.9 | 68.1 | 71.4 | 67.1 | 50.3 | 62.7 | 62.2 | 58.5 |
| MPNet[ | — | 86.8 | 61.3 | 94.0 | 94.1 | 76.6 | 53.4 | 33.6 | 54.2 | 62.7 | 70.2 | 60.2 | 36.6 | 53.4 | 54.3 | 53.5 |
| Octant-CNN[ | — | 84.6 | 58.3 | 92.1 | 94.5 | 76.3 | 48.9 | 30.8 | 56.9 | 62.9 | 65.8 | 55.5 | 28 | 48.1 | 50.3 | 48.4 |
| GFSOP-Net[ | 71.0 | 84.1 | 58.5 | — | — | — | — | — | — | — | — | — | — | — | — | — |
| AMFF-DGCNN[ | — | 85.6 | 59.9 | 92.9 | 94.7 | 78.2 | 54.0 | 43.3 | 59.1 | 62.6 | 67.4 | 59.1 | 18.3 | 51.3 | 47.4 | 50.5 |
| BAAFNet[ | 79.4 | 87.1 | 66.6 | 93.7 | 96.9 | 78.7 | 41.0 | 40.2 | 61.1 | 69.0 | 66.0 | 78.3 | 63.4 | 59.9 | 59.1 | 59.2 |
| MFF-Net | 80.0 | 87.2 | 67.5 | 93.5 | 96.9 | 78.3 | 37.0 | 48.0 | 61.8 | 67.8 | 67.4 | 79.2 | 65.5 | 60.2 | 62.2 | 60.1 |
| 网络模型 | mAcc | OA | mIoU | 不同类别物体的分割准确率 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 天花板 | 地板 | 墙 | 梁 | 柱 | 窗户 | 门 | 椅子 | 桌子 | 书柜 | 沙发 | 黑板 | 杂物 | ||||
| PointNet[ | — | — | 41.09 | 88.8 | 97.3 | 69.8 | 0.05 | 3.9 | 46.3 | 10.8 | 52.6 | 58.9 | 40.3 | 5.9 | 26.4 | 33.2 |
| PointNet++[ | — | — | 50.00 | 90.8 | 96.5 | 74.1 | 0.00 | 5.8 | 43.6 | 25.4 | 69.2 | 76.9 | 21.5 | 55.6 | 49.3 | 41.9 |
| SegCloud[ | — | — | 48.90 | 90.1 | 96.1 | 69.9 | 0.00 | 18.4 | 38.4 | 23.1 | 75.9 | 70.4 | 58.4 | 40.9 | 13.0 | 41.6 |
| DGCNN[ | — | 83.3 | 47.60 | 92.8 | 97.5 | 74.9 | 0.00 | 11.8 | 50.7 | 23.7 | 66.4 | 69.6 | 8.6 | 48.7 | 31.6 | 42.1 |
| PointWeb[ | 66.6 | 87.0 | 60.30 | 92.0 | 98.5 | 79.4 | 0.00 | 21.1 | 60.0 | 34.8 | 76.3 | 88.3 | 46.9 | 69.3 | 64.9 | 52.5 |
| AMFF-DGCNN[ | — | 84.6 | 51.60 | 92.8 | 97.8 | 78.1 | 0.00 | 24.9 | 51.9 | 31.1 | 69.1 | 73.9 | 16.2 | 52.7 | 39.5 | 42.2 |
| BAAFNet[ | 71.2 | 87.0 | 62.30 | 92.0 | 97.9 | 80.9 | 0.00 | 30.9 | 58.2 | 47.6 | 78.1 | 87.2 | 52.4 | 67.0 | 67.3 | 51.0 |
| MFF-Net | 72.4 | 87.1 | 63.00 | 93.0 | 98.0 | 81.4 | 0.00 | 26.4 | 59.9 | 46.2 | 78.9 | 87.1 | 65.8 | 65.8 | 64.9 | 51.1 |
表2 S3DIS数据集上的Area5语义分割结果 (%)
Tab. 2 Semantic segmentation results of Area5 on S3DIS dataset
| 网络模型 | mAcc | OA | mIoU | 不同类别物体的分割准确率 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 天花板 | 地板 | 墙 | 梁 | 柱 | 窗户 | 门 | 椅子 | 桌子 | 书柜 | 沙发 | 黑板 | 杂物 | ||||
| PointNet[ | — | — | 41.09 | 88.8 | 97.3 | 69.8 | 0.05 | 3.9 | 46.3 | 10.8 | 52.6 | 58.9 | 40.3 | 5.9 | 26.4 | 33.2 |
| PointNet++[ | — | — | 50.00 | 90.8 | 96.5 | 74.1 | 0.00 | 5.8 | 43.6 | 25.4 | 69.2 | 76.9 | 21.5 | 55.6 | 49.3 | 41.9 |
| SegCloud[ | — | — | 48.90 | 90.1 | 96.1 | 69.9 | 0.00 | 18.4 | 38.4 | 23.1 | 75.9 | 70.4 | 58.4 | 40.9 | 13.0 | 41.6 |
| DGCNN[ | — | 83.3 | 47.60 | 92.8 | 97.5 | 74.9 | 0.00 | 11.8 | 50.7 | 23.7 | 66.4 | 69.6 | 8.6 | 48.7 | 31.6 | 42.1 |
| PointWeb[ | 66.6 | 87.0 | 60.30 | 92.0 | 98.5 | 79.4 | 0.00 | 21.1 | 60.0 | 34.8 | 76.3 | 88.3 | 46.9 | 69.3 | 64.9 | 52.5 |
| AMFF-DGCNN[ | — | 84.6 | 51.60 | 92.8 | 97.8 | 78.1 | 0.00 | 24.9 | 51.9 | 31.1 | 69.1 | 73.9 | 16.2 | 52.7 | 39.5 | 42.2 |
| BAAFNet[ | 71.2 | 87.0 | 62.30 | 92.0 | 97.9 | 80.9 | 0.00 | 30.9 | 58.2 | 47.6 | 78.1 | 87.2 | 52.4 | 67.0 | 67.3 | 51.0 |
| MFF-Net | 72.4 | 87.1 | 63.00 | 93.0 | 98.0 | 81.4 | 0.00 | 26.4 | 59.9 | 46.2 | 78.9 | 87.1 | 65.8 | 65.8 | 64.9 | 51.1 |

图5 S3DIS数据集上BAAFNet和MFF-Net的语义分割结果
Fig. 5 Semantic segmentation results of BAAFNet and MFF-Net on S3DIS dataset
| 模型 | OA | mIoU | 不同类别物体的分割准确率 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 人造地形 | 自然地形 | 高植被 | 低植被 | 建筑物 | 人造景观 | 扫描伪影 | 汽车 | |||
| BAAFNet | 64.6 | 43.8 | 72.6 | 21.0 | 34.5 | 37.2 | 52.0 | 30.3 | 38.4 | 63.9 |
| MFF-Net | 73.9 | 57.0 | 74.4 | 29.9 | 56.1 | 42.9 | 64.9 | 53.5 | 72.9 | 61.2 |
表 3 Semantic3D(semantic-8)数据集上的语义分割结果 (%)
Tab. 3 Semantic segmentation results on Semantic3D(semantic-8) dataset
| 模型 | OA | mIoU | 不同类别物体的分割准确率 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 人造地形 | 自然地形 | 高植被 | 低植被 | 建筑物 | 人造景观 | 扫描伪影 | 汽车 | |||
| BAAFNet | 64.6 | 43.8 | 72.6 | 21.0 | 34.5 | 37.2 | 52.0 | 30.3 | 38.4 | 63.9 |
| MFF-Net | 73.9 | 57.0 | 74.4 | 29.9 | 56.1 | 42.9 | 64.9 | 53.5 | 72.9 | 61.2 |
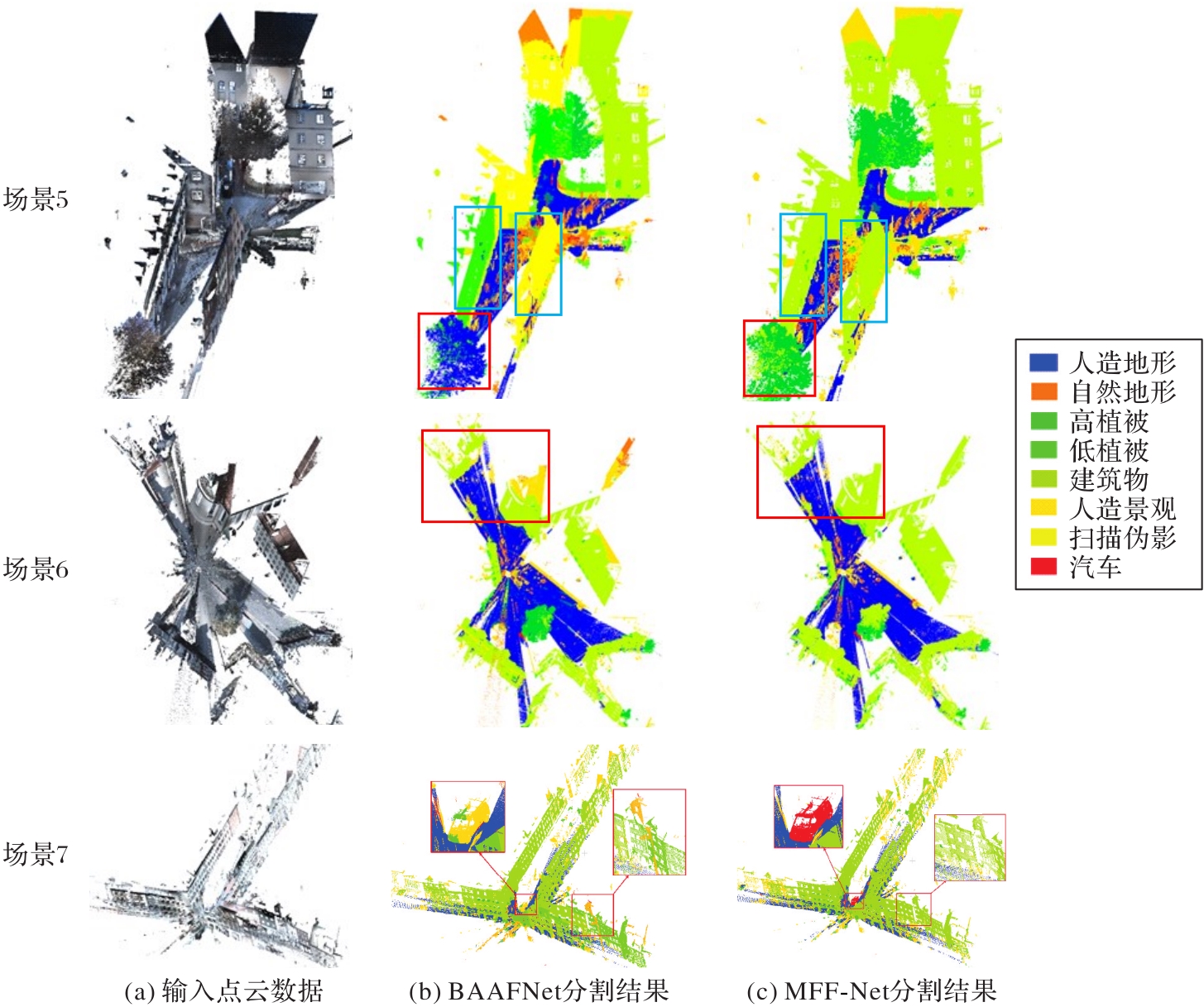
图6 Semantic3D数据集上BAAFNet和MFF-Net的语义分割效果
Fig. 6 Semantic segmentation results of BAAFNet and MFF-Net on Semantic3D dataset
| 改进后的边特征 | 权重计算 | 空间注意力 | 空间语义分布特征 | mAcc/% |
|---|---|---|---|---|
| 71.2 | ||||
| √ | 71.3 | |||
| √ | √ | 71.6 | ||
| √ | √ | √ | 72.2 | |
| √ | √ | √ | √ | 72.4 |
表4 消融实验结果
Tab. 4 Results of ablation experiment
| 改进后的边特征 | 权重计算 | 空间注意力 | 空间语义分布特征 | mAcc/% |
|---|---|---|---|---|
| 71.2 | ||||
| √ | 71.3 | |||
| √ | √ | 71.6 | ||
| √ | √ | √ | 72.2 | |
| √ | √ | √ | √ | 72.4 |
| 1 | GUO Y, WANG H, HU Q, et al. Deep learning for 3D point clouds: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(12): 4338-4364. 10.1109/tpami.2020.3005434 |
| 2 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. 10.1109/cvpr.2017.16 |
| 3 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 5105-5114. |
| 4 | HU Q, YANG B, XIE L, et al. RandLA-Net: efficient semantic segmentation of large-scale point clouds[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11105-11114. 10.1109/cvpr42600.2020.01112 |
| 5 | XU M, DING R, ZHAO H, et al. PAConv: position adaptive convolution with dynamic kernel assembling on point clouds[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 3172-3181. 10.1109/cvpr46437.2021.00319 |
| 6 | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. 10.1145/3326362 |
| 7 | ZHANG K, HAO M, WANG J, et al. Linked dynamic graph CNN: learning on point cloud via linking hierarchical features[EB/OL]. (2019-08-06)[2022-11-12].. 10.1109/m2vip49856.2021.9665104 |
| 8 | CHEN L, ZHANG Q. DDGCN: graph convolution network based on direction and distance for point cloud learning[J]. The Visual Computer, 2023, 39(3): 863-873. 10.1007/s00371-021-02351-8 |
| 9 | DU Z, YE H, CAO F. A novel local-global graph convolutional method for point cloud semantic segmentation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2022(Early Access): 1-15. 10.1109/tnnls.2022.3155282 |
| 10 | CHEN C, FRAGONARA L Z, TSOURDOS A. GAPNet: graph attention based point neural network for exploiting local feature of point cloud[EB/OL]. (2019-05-21) [2022-11-12].. 10.1016/j.neucom.2021.01.095 |
| 11 | CHEN L, CHEN W, XU Z, et al. DAPnet: a double self-attention convolutional network for point cloud semantic labeling[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 9680-9691. 10.1109/jstars.2021.3113047 |
| 12 | DENG S, DONG Q. GA-NET: global attention network for point cloud semantic segmentation[J]. IEEE Signal Processing Letters, 2021, 28: 1300-1304. 10.1109/lsp.2021.3082851 |
| 13 | CHEN Q, ZHANG Z, CHEN S, et al. A self-attention based global feature enhancing network for semantic segmentation of large-scale urban street-level point clouds[J]. International Journal of Applied Earth Observation and Geoinformation, 2022, 113: No.102974. 10.1016/j.jag.2022.102974 |
| 14 | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1534-1543. 10.1109/cvpr.2016.170 |
| 15 | HACKEL T, SAVINOV N, LADICKY L, et al. Semantic3D.net: a new large-scale point cloud classification benchmark[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-1/W1: 91-98. 10.5194/isprs-annals-iv-1-w1-91-2017 |
| 16 | HUANG Q, WANG W, NEUMANN U. Recurrent slice networks for 3D segmentation of point clouds[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 2626-2635. 10.1109/cvpr.2018.00278 |
| 17 | LANDRIEU L, SIMONOVSKY M. Large-scale point cloud semantic segmentation with superpoint graphs[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4558-4567. 10.1109/cvpr.2018.00479 |
| 18 | ZHAO H, JIANG L, FU C W, et al. PointWeb: enhancing local neighborhood features for point cloud processing[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 5560-5568. 10.1109/cvpr.2019.00571 |
| 19 | HE T, GONG D, TIAN Z, et al. Learning and memorizing representative prototypes for 3D point cloud semantic and instance segmentation[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12363. Cham: Springer, 2020: 564-580. |
| 20 | 许翔,帅惠,刘青山. 基于卦限卷积神经网络的3D点云分析[J]. 自动化学报, 2021, 47(12):2791-2800. 10.16383/j.aas.c200080 |
| XU X, SHUAI H, LIU Q S. Octant convolutional neural network for 3D point cloud analysis[J]. Acta Automatica Sinica, 2021, 47(12):2791-2800. 10.16383/j.aas.c200080 | |
| 21 | 鲁斌,柳杰林. 基于特征增强的三维点云语义分割[J]. 计算机应用, 2023, 43(6):1818-1825. 10.11772/j.issn.1001-9081.2022050688 |
| LU B, LIU J L. Semantic segmentation for 3D point clouds based on feature enhancement[J]. Journal of Computer Applications, 2023, 43(6):1818-1825. 10.11772/j.issn.1001-9081.2022050688 | |
| 22 | 郝雯,王红霄,汪洋. 结合空间注意力与形状特征的三维点云语义分割[J]. 激光与光电子学进展, 2022, 59(8): No.0828004. 10.3788/LOP202259.0828004 |
| HAO W, WANG H X, WANG Y. Semantic segmentation of three-dimensional point cloud based on spatial attention and shape feature[J]. Laser and Optoelectronics Progress, 2022, 59(8): No.0828004. 10.3788/LOP202259.0828004 | |
| 23 | QIU S, ANWAR S, BARNES N. Semantic segmentation for real point cloud scenes via bilateral augmentation and adaptive fusion[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 1757-1767. 10.1109/cvpr46437.2021.00180 |
| 24 | TCHAPMI L, CHOY C, ARMENI I, et al. SEGCloud: semantic segmentation of 3D point clouds[C]// Proceedings of the 2017 International Conference on 3D Vision. Piscataway: IEEE, 2017: 537-547. 10.1109/3dv.2017.00067 |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 李晨倩, 刘俊. 基于半监督和多尺度级联注意力的超声颈动脉斑块分割方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2604-2610. |
| [3] | 顾焰杰, 张英俊, 刘晓倩, 周围, 孙威. 基于时空多图融合的交通流量预测[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2618-2625. |
| [4] | 刘瑞华, 郝子赫, 邹洋杨. 基于多层级精细特征融合的步态识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2250-2257. |
| [5] | 唐媛, 陈艳平, 扈应, 黄瑞章, 秦永彬. 基于多尺度混合注意力卷积神经网络的关系抽取模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2011-2017. |
| [6] | 黄梦源, 常侃, 凌铭阳, 韦新杰, 覃团发. 基于层间引导的低光照图像渐进增强算法[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1911-1919. |
| [7] | 刘越, 刘芳, 武奥运, 柴秋月, 王天笑. 基于自注意力机制与图卷积的3D目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1972-1977. |
| [8] | 李鑫, 孟乔, 皇甫俊逸, 孟令辰. 基于分离式标签协同学习的YOLOv5多属性分类[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1619-1628. |
| [9] | 韩贵金, 张馨渊, 张文涛, 黄娅. 基于多特征融合的自监督图像配准算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1597-1604. |
| [10] | 高文烁, 陈晓云. 基于节点结构的点云分类网络[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1471-1478. |
| [11] | 李鸿天, 史鑫昊, 潘卫国, 徐成, 徐冰心, 袁家政. 融合多尺度和注意力机制的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1437-1444. |
| [12] | 张鹏飞, 韩李涛, 冯恒健, 李洪梅. 基于注意力机制和全局特征优化的点云语义分割[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1086-1092. |
| [13] | 李威, 陈玲, 徐修远, 朱敏, 郭际香, 周凯, 牛颢, 张煜宸, 易珊烨, 章毅, 罗凤鸣. 基于多任务学习的间质性肺病分割算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1285-1293. |
| [14] | 肖斌, 甘昀, 汪敏, 张兴鹏, 王照星. 基于端口注意力与通道空间注意力的网络异常流量检测[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1027-1034. |
| [15] | 王铂越, 李英祥, 钟剑丹. 基于改进Res-UNet的昼夜地基云图分割网络[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1310-1316. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||