《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (5): 1613-1618.DOI: 10.11772/j.issn.1001-9081.2023050635
所属专题: 多媒体计算与计算机仿真
耿焕同1,2, 刘振宇1( ), 蒋骏1, 范子辰3, 李嘉兴1
), 蒋骏1, 范子辰3, 李嘉兴1
Huantong GENG1,2, Zhenyu LIU1(), Jun JIANG1, Zichen FAN3, Jiaxing LI1
摘要:
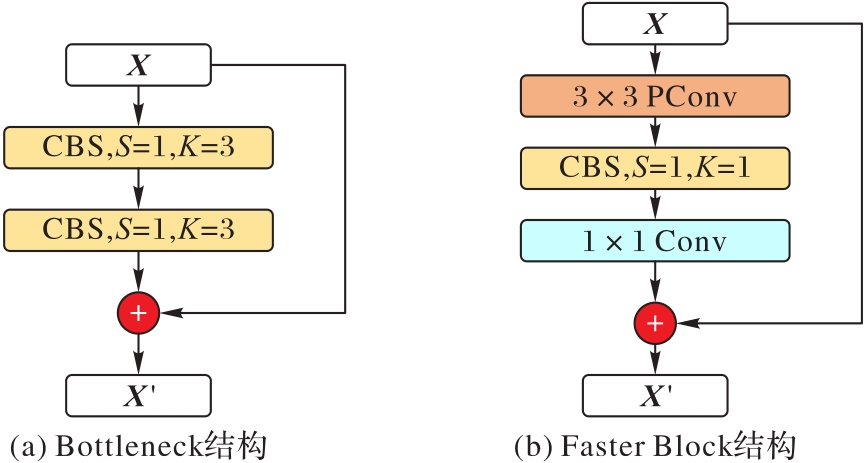
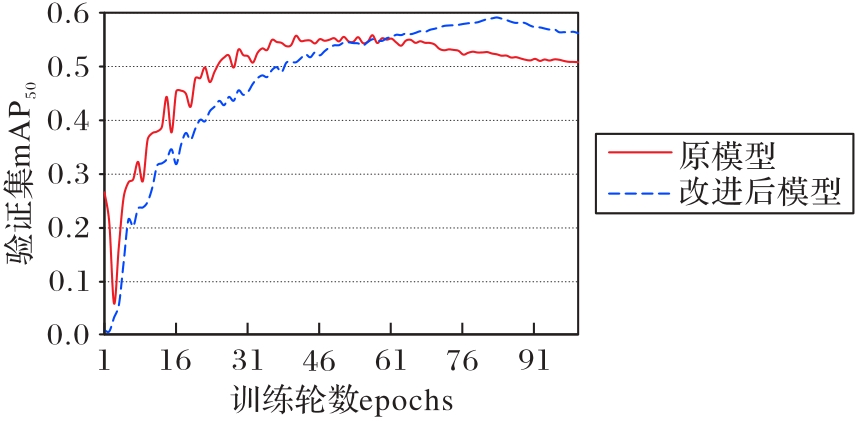
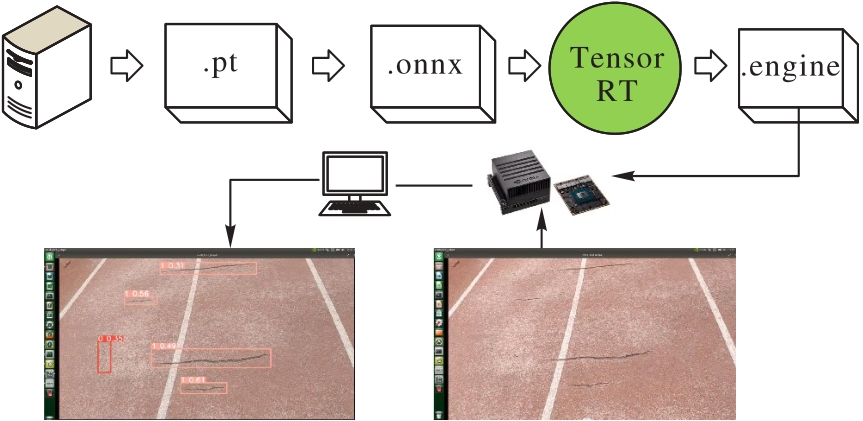
在边缘端设备部署YOLOv8L模型进行道路裂缝检测可以实现较高的精度,但难以保证实时检测。针对此问题,提出一种可部署到边缘计算设备Jetson AGX Xavier上的基于改进YOLOv8模型的目标检测算法。首先,利用部分卷积设计Faster Block结构以替换YOLOv8 C2f模块中的Bottleneck结构,并将改进后的C2f模块记为C2f-Faster;其次,在YOLOv8主干网络中的每个C2f-Faster模块之后接一个SE(Squeeze-and-Excitation)通道注意力层,进一步提高检测的精度。在开源道路损害数据集RDD20(Road Damage Detection 20)上的实验结果表明:所提方法的平均F1得分为0.573,每秒检测帧数(FPS)为47,模型大小为55.5 MB,相较于GRDDC2020 (Global Road Damage Detection Challenge 2020)的SOTA(State-Of-The-Art)模型,F1得分提高了0.8个百分点,FPS提高了291.7%,模型大小减小了41.8%,实现了在边缘设备上对道路裂缝实时且准确的检测。
中图分类号: