


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (12): 4021-4029.DOI: 10.11772/j.issn.1001-9081.2024121811
肖海林1( ), 田波1, 胡彬1, 孔祥婷1, 吴媛媛1, 马仁煜2, 张中山3
), 田波1, 胡彬1, 孔祥婷1, 吴媛媛1, 马仁煜2, 张中山3
收稿日期:2024-12-25
修回日期:2025-04-01
接受日期:2025-04-02
发布日期:2025-04-15
出版日期:2025-12-10
通讯作者:
肖海林
作者简介:田波(1999—),男(土家族),湖北恩施人,硕士研究生,主要研究方向:目标检测、图像处理基金资助:
Hailin XIAO1(), Bo TIAN1, Bin HU1, Xiangting KONG1, Yuanyuan WU1, Renyu MA2, Zhongshan ZHANG3
Received:2024-12-25
Revised:2025-04-01
Accepted:2025-04-02
Online:2025-04-15
Published:2025-12-10
Contact:
Hailin XIAO
About author:TIAN Bo, born in 1999, M. S. candidate. His research interests include target detection, image processing.Supported by:摘要:
针对当前无人机(UAV)视角下小目标检测存在的准确率低问题,提出一种基于信道先验多尺度跨轴注意YOLO (CPMS-YOLO)的UAV视角下多尺度小目标检测算法。首先,在骨干网络中融入能在复杂背景下更好地提取和强化有用特征的多尺度注意力模块CPMS(Channel-Prior-Multi-Scale cross-axis attention),该模块使算法能更容易地学习感兴趣区域的位置细节并提高对不同尺度小目标在复杂背景下的特征提取能力;其次,对骨干网络和特征融合网络进行重构,即增加一个具有丰富小目标语义信息的特征层,并通过融合模块MultiSEAM(Multi-scale Separated and Enhancement Attention Module)将上下文特征信息进行互补,从而更好地捕捉和识别小目标;再次,设计C2f-RFE(C2f-Receptive Field Enhancement)模块改进颈部网络中深层的C2f(Faster Implementation of CSP Bottleneck with 2 convolutions)模块,以增加特征图的感受野,从而更准确、更快速且多角度地定位目标特征,进而提升对小目标的检测能力;最后,引入损失函数WIoUv3 (Wise-IoU(Intersection over Union) v3)动态优化小目标的损失权值,以解决边界框回归任务中正负样本之间的差异问题,从而进一步提高对小目标的检测能力。在公共数据集VisDrone2019上的实验结果表明:与基准算法YOLOv8s相比,所提算法的精确率、召回率、mAP50(mean Average Precision at IoU threshold of 50%)和mAP50-95(mean Average Precision at IoU thresholds from 50% to 95%)分别提升了5.9、5.8、6.3和3.6个百分点。可见,基于CPMS-YOLO的UAV视角下多尺度小目标检测算法能更精确地捕捉和识别小目标。
中图分类号:
肖海林, 田波, 胡彬, 孔祥婷, 吴媛媛, 马仁煜, 张中山. 基于信道先验多尺度跨轴注意YOLO的无人机视角下多尺度小目标检测算法[J]. 计算机应用, 2025, 45(12): 4021-4029.
Hailin XIAO, Bo TIAN, Bin HU, Xiangting KONG, Yuanyuan WU, Renyu MA, Zhongshan ZHANG. Multi-scale small target detection algorithm for UAV perspective based on channel-prior multi-scale cross-axis attention-YOLO[J]. Journal of Computer Applications, 2025, 45(12): 4021-4029.
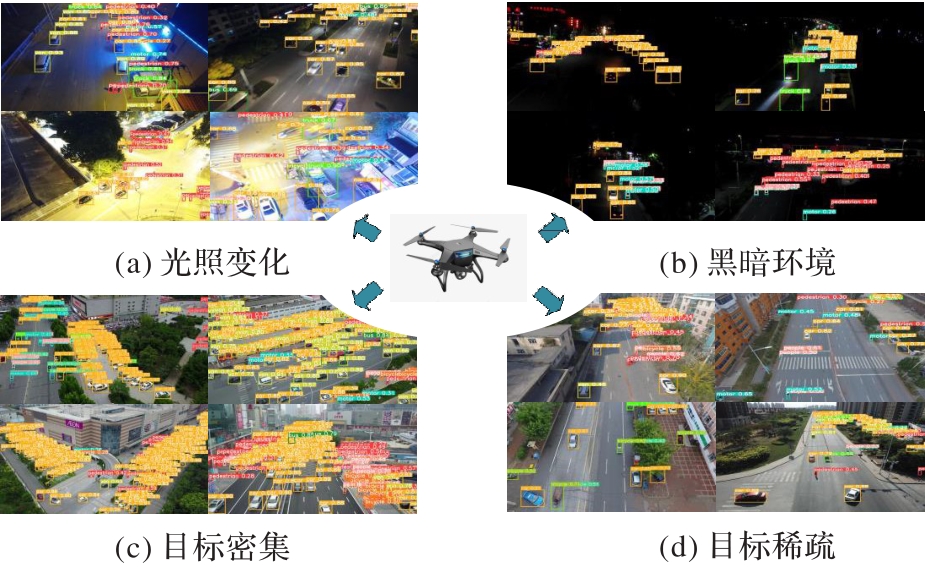
图1 UAV交通监控视角下的问题
Fig.1 Issues in traffic monitoring from UAV perspective
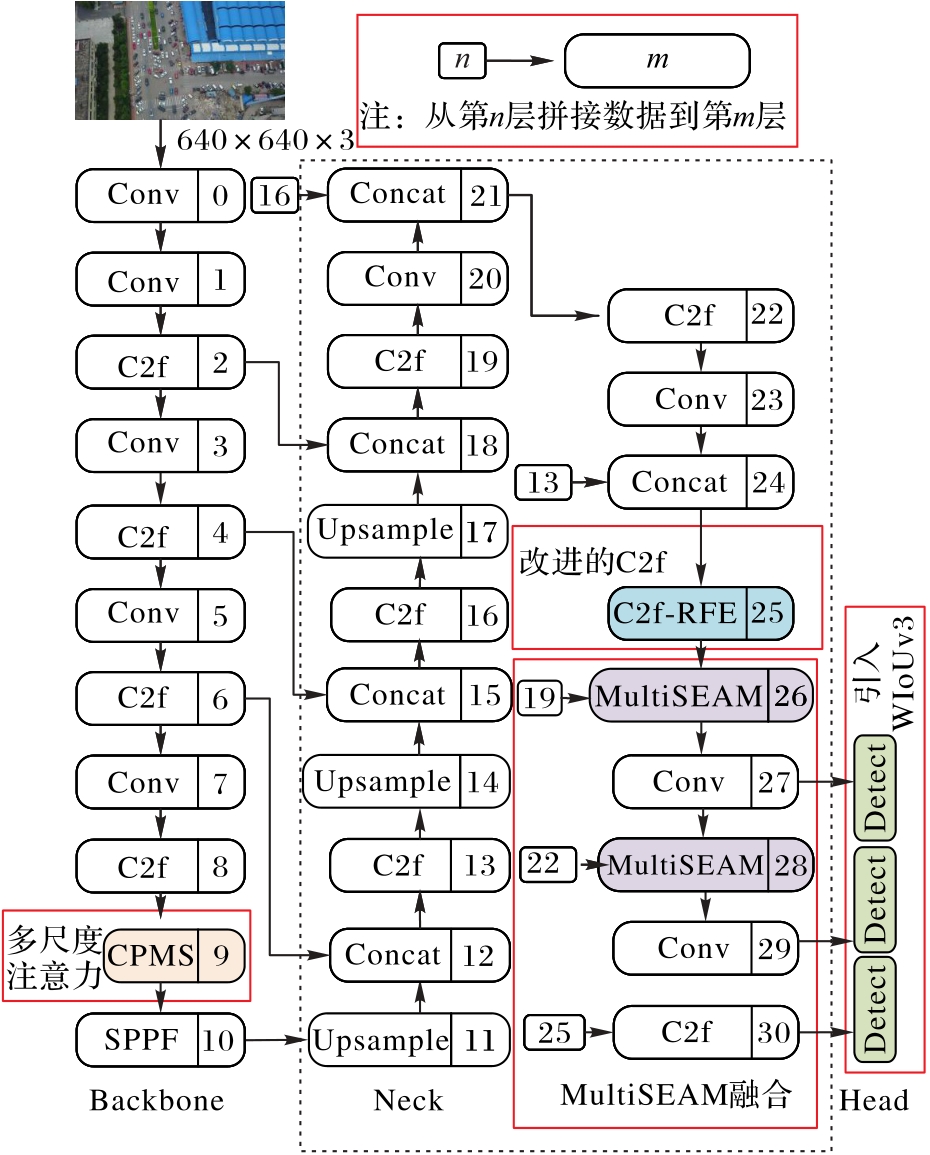
图2 本文算法的结构
Fig.2 Structure of proposed algorithm
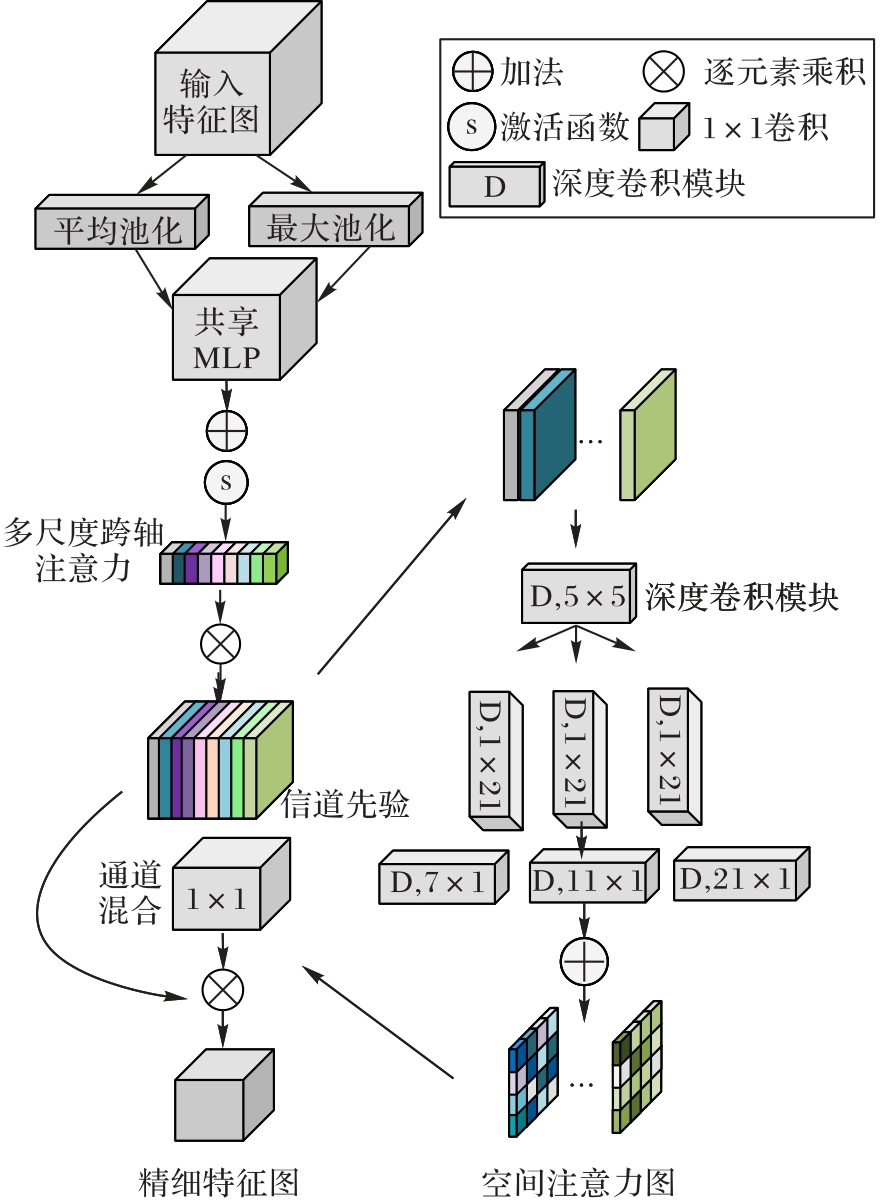
图3 CPMS的结构
Fig.3 Structure of CPMS
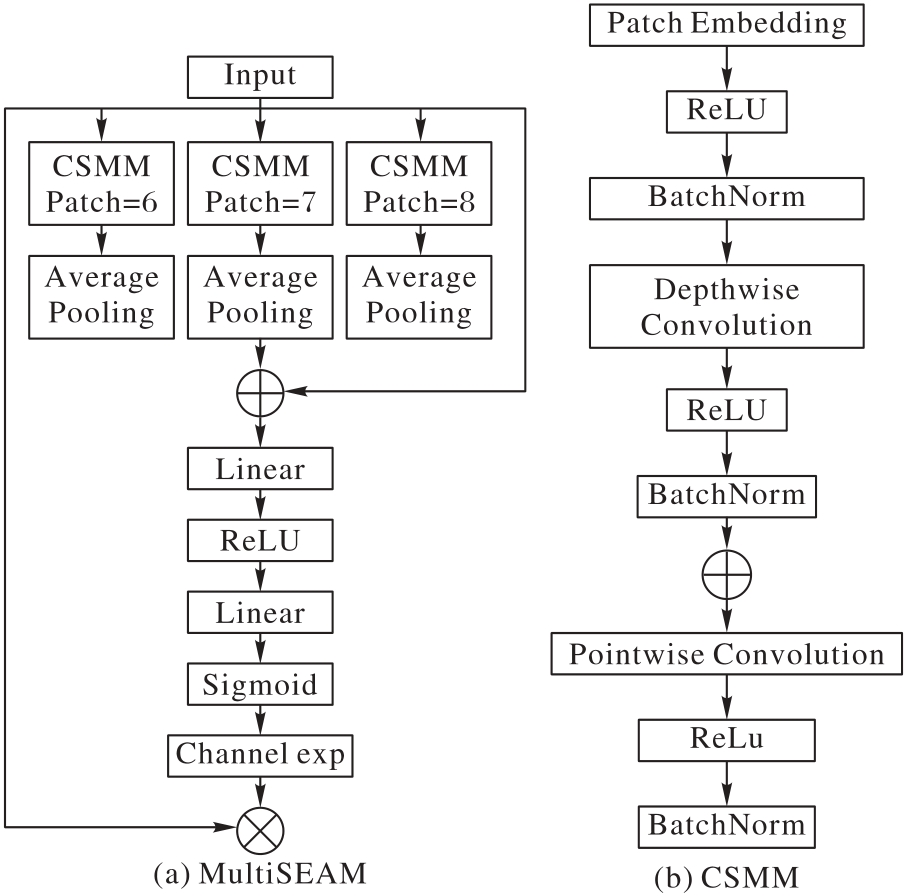
图4 MultiSEAM
Fig.4 MultiSEAM
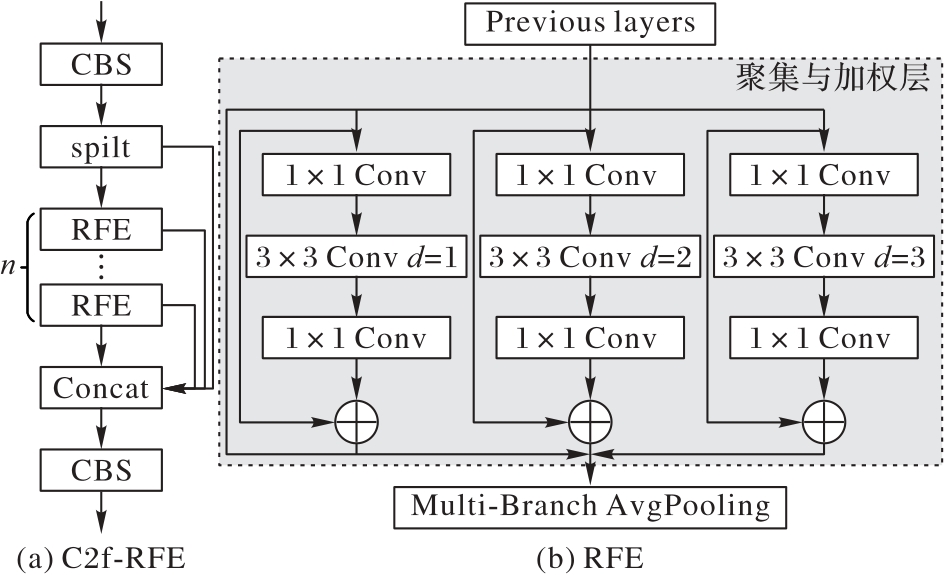
图5 C2f-RFE与RFE模块
Fig.5 C2f-RFE and RFE Module
| 参数名称 | 设置 | 参数名称 | 设置 |
|---|---|---|---|
| 轮数 | 300 | 预热周期 | 3.0 |
| 图片大小 | 640 | 初始学习率 | 0.01 |
| 批量大小 | 16 | 最终学习率 | 0.01 |
| 线程数 | 4 | 学习率动量 | 0.937 |
| 1.9 | 权重衰减 | 0.005 | |
| 3 | 优化器 | SGD |
表1 实验参数设置
Tab. 1 Experimental parameter setting
| 参数名称 | 设置 | 参数名称 | 设置 |
|---|---|---|---|
| 轮数 | 300 | 预热周期 | 3.0 |
| 图片大小 | 640 | 初始学习率 | 0.01 |
| 批量大小 | 16 | 最终学习率 | 0.01 |
| 线程数 | 4 | 学习率动量 | 0.937 |
| 1.9 | 权重衰减 | 0.005 | |
| 3 | 优化器 | SGD |
| 损失函数 | 精确率 | 召回率 | mAP50 | mAP50-95 |
|---|---|---|---|---|
| EIoU | 49.1 | 38.0 | 38.7 | 23.4 |
| CIoU | 50.9 | 38.2 | 39.3 | 23.5 |
| SIoU | 51.5 | 38.5 | 39.4 | 23.4 |
| WIoUv1 | 50.1 | 38.5 | 39.3 | 23.3 |
| WIoUv2 | 50.6 | 38.4 | 39.3 | 23.2 |
| WIoUv3 | 51.3 | 38.6 | 40.0 | 23.6 |
表2 不同损失函数的比较 (%)
Tab.2 Comparison of different loss functions
| 损失函数 | 精确率 | 召回率 | mAP50 | mAP50-95 |
|---|---|---|---|---|
| EIoU | 49.1 | 38.0 | 38.7 | 23.4 |
| CIoU | 50.9 | 38.2 | 39.3 | 23.5 |
| SIoU | 51.5 | 38.5 | 39.4 | 23.4 |
| WIoUv1 | 50.1 | 38.5 | 39.3 | 23.3 |
| WIoUv2 | 50.6 | 38.4 | 39.3 | 23.2 |
| WIoUv3 | 51.3 | 38.6 | 40.0 | 23.6 |
| 算法 | AP/% | mAP/ % | 帧率/ (frame·s-1) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | People | Bicycle | Car | Van | Truck | Tricycle | Awning-Tricycle | Bus | Motor | |||
| YOLOV8s | 42.7 | 32.0 | 12.4 | 79.1 | 44.0 | 36.5 | 28.1 | 15.9 | 57.0 | 44.9 | 39.3 | 100.3 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 42.3 | 34.2 | 17.0 | 62.1 | 53.4 | 45.6 | 108.5 |
表3 本文算法与基线算法YOLOv8s的检测精度和帧率比较(VisDrone2019)
Tab.3 Comparison of detection precision and FPS between proposed algorithm and baseline algorithm YOLOv8s (VisDrone2019)
| 算法 | AP/% | mAP/ % | 帧率/ (frame·s-1) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | People | Bicycle | Car | Van | Truck | Tricycle | Awning-Tricycle | Bus | Motor | |||
| YOLOV8s | 42.7 | 32.0 | 12.4 | 79.1 | 44.0 | 36.5 | 28.1 | 15.9 | 57.0 | 44.9 | 39.3 | 100.3 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 42.3 | 34.2 | 17.0 | 62.1 | 53.4 | 45.6 | 108.5 |
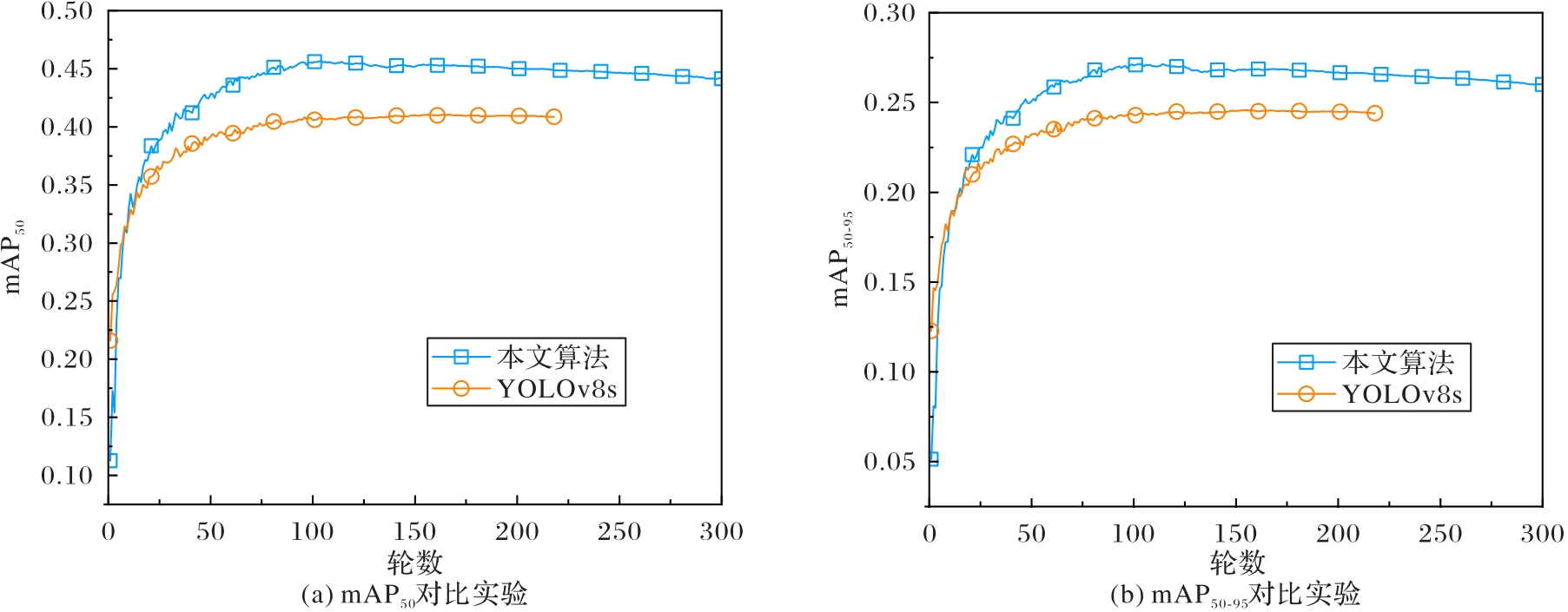
图6 本文算法与基线算法的对比实验结果(VisDrone2019)
Fig.6 Comparison experimental results of proposed algorithm and baseline algorithm (VisDrone2019)
| 算法 | AP/% | mAP50 /% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | Person | Bicycle | Car | Van | Truck | Tricycle | Awning-tricycle | Bus | Motor | ||
| Faster R-CNN[ | 20.9 | 14.8 | 7.3 | 51.0 | 29.7 | 19.5 | 14.0 | 8.8 | 30.5 | 21.2 | 21.8 |
| Cascade R-CNN[ | 22.2 | 14.8 | 7.6 | 54.6 | 31.5 | 21.6 | 14.8 | 8.6 | 34.9 | 21.4 | 23.2 |
| CenterNet[ | 22.6 | 20.6 | 14.6 | 59.7 | 24.0 | 21.3 | 20.1 | 17.4 | 37.9 | 23.7 | 26.2 |
| DMNet[ | 28.5 | 20.4 | 15.9 | 56.8 | 37.9 | 30.1 | 22.6 | 14.0 | 47.1 | 29.2 | 30.3 |
| CDNet[ | 35.6 | 19.2 | 13.8 | 55.8 | 42.1 | 38.2 | 33.0 | 25.4 | 49.5 | 29.3 | 34.2 |
| HR-Cascade[ | 32.6 | 17.3 | 11.1 | 54.7 | 42.4 | 35.3 | 32.7 | 24.1 | 46.5 | 28.2 | 32.5 |
| MSC-CenterNet[ | 33.7 | 15.2 | 12.1 | 55.2 | 40.5 | 34.1 | 29.2 | 21.6 | 42.2 | 27.5 | 31.1 |
| FPN[ | 33.0 | 25.8 | 13.9 | 69.4 | 40.0 | 34.3 | 27.4 | 13.4 | 49.1 | 37.6 | 35.6 |
| YOLOv3[ | 18.1 | 9.9 | 2.0 | 56.6 | 17.5 | 17.6 | 6.7 | 2.9 | 32.4 | 17.0 | 17.1 |
| SlimYOLOv3[ | 17.4 | 9.3 | 2.4 | 55.7 | 18.3 | 16.9 | 9.1 | 3.0 | 26.9 | 17.0 | 17.6 |
| YOLOv3-LITE[ | 34.5 | 23.4 | 7.9 | 70.8 | 31.3 | 21.9 | 15.3 | 6.2 | 40.9 | 32.7 | 28.5 |
| YOLOv4[ | 24.8 | 12.6 | 8.6 | 64.3 | 22.4 | 22.7 | 11.4 | 7.6 | 44.3 | 21.7 | 30.7 |
| Modifies YOLOv4[ | 28.2 | 15.9 | 5.8 | 65.7 | 25.2 | 26.1 | 13.8 | 8.1 | 40.2 | 26.1 | 32.5 |
| YOLOv5s[ | 40.8 | 32.6 | 13.6 | 74.6 | 37.6 | 32.8 | 21.9 | 12.5 | 44.9 | 40.0 | 35.1 |
| MSA-YOLO[ | 33.4 | 17.3 | 11.2 | 76.8 | 41.5 | 41.4 | 14.8 | 18.4 | 60.9 | 31.0 | 34.7 |
| YOLOv8[ | 50.2 | 39.7 | 21.3 | 74.8 | 50.5 | 46.2 | 33.3 | 22.1 | 67.4 | 45.3 | 45.1 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 41.0 | 34.2 | 17.0 | 62.1 | 53.4 | 45.7 |
表4 VisDrone2019数据集上不同目标检测算法的AP和mAP50比较
Tab.4 Comparison of AP and mAP50 of different target detection algorithms on VisDrone2019 dataset
| 算法 | AP/% | mAP50 /% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | Person | Bicycle | Car | Van | Truck | Tricycle | Awning-tricycle | Bus | Motor | ||
| Faster R-CNN[ | 20.9 | 14.8 | 7.3 | 51.0 | 29.7 | 19.5 | 14.0 | 8.8 | 30.5 | 21.2 | 21.8 |
| Cascade R-CNN[ | 22.2 | 14.8 | 7.6 | 54.6 | 31.5 | 21.6 | 14.8 | 8.6 | 34.9 | 21.4 | 23.2 |
| CenterNet[ | 22.6 | 20.6 | 14.6 | 59.7 | 24.0 | 21.3 | 20.1 | 17.4 | 37.9 | 23.7 | 26.2 |
| DMNet[ | 28.5 | 20.4 | 15.9 | 56.8 | 37.9 | 30.1 | 22.6 | 14.0 | 47.1 | 29.2 | 30.3 |
| CDNet[ | 35.6 | 19.2 | 13.8 | 55.8 | 42.1 | 38.2 | 33.0 | 25.4 | 49.5 | 29.3 | 34.2 |
| HR-Cascade[ | 32.6 | 17.3 | 11.1 | 54.7 | 42.4 | 35.3 | 32.7 | 24.1 | 46.5 | 28.2 | 32.5 |
| MSC-CenterNet[ | 33.7 | 15.2 | 12.1 | 55.2 | 40.5 | 34.1 | 29.2 | 21.6 | 42.2 | 27.5 | 31.1 |
| FPN[ | 33.0 | 25.8 | 13.9 | 69.4 | 40.0 | 34.3 | 27.4 | 13.4 | 49.1 | 37.6 | 35.6 |
| YOLOv3[ | 18.1 | 9.9 | 2.0 | 56.6 | 17.5 | 17.6 | 6.7 | 2.9 | 32.4 | 17.0 | 17.1 |
| SlimYOLOv3[ | 17.4 | 9.3 | 2.4 | 55.7 | 18.3 | 16.9 | 9.1 | 3.0 | 26.9 | 17.0 | 17.6 |
| YOLOv3-LITE[ | 34.5 | 23.4 | 7.9 | 70.8 | 31.3 | 21.9 | 15.3 | 6.2 | 40.9 | 32.7 | 28.5 |
| YOLOv4[ | 24.8 | 12.6 | 8.6 | 64.3 | 22.4 | 22.7 | 11.4 | 7.6 | 44.3 | 21.7 | 30.7 |
| Modifies YOLOv4[ | 28.2 | 15.9 | 5.8 | 65.7 | 25.2 | 26.1 | 13.8 | 8.1 | 40.2 | 26.1 | 32.5 |
| YOLOv5s[ | 40.8 | 32.6 | 13.6 | 74.6 | 37.6 | 32.8 | 21.9 | 12.5 | 44.9 | 40.0 | 35.1 |
| MSA-YOLO[ | 33.4 | 17.3 | 11.2 | 76.8 | 41.5 | 41.4 | 14.8 | 18.4 | 60.9 | 31.0 | 34.7 |
| YOLOv8[ | 50.2 | 39.7 | 21.3 | 74.8 | 50.5 | 46.2 | 33.3 | 22.1 | 67.4 | 45.3 | 45.1 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 41.0 | 34.2 | 17.0 | 62.1 | 53.4 | 45.7 |
| 算法 | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 参数量/106 | 模型大小/MB | GFLOPs |
|---|---|---|---|---|---|---|---|
| YOLOv3-tiny | 92.3 | 75.9 | 87.3 | 65.2 | 12.1 | 24.4 | 18.9 |
| YOLOv5s | 97.6 | 96.7 | 99.1 | 80.1 | 9.1 | 17.7 | 24.0 |
| YOLOv6s | 97.4 | 96.8 | 99.1 | 81.2 | 16.3 | 32.8 | 44.9 |
| YOLOv8s | 97.7 | 97.2 | 99.2 | 83.8 | 11.1 | 21.5 | 28.7 |
| 本文算法 | 98.8 | 98.5 | 99.4 | 85.7 | 14.1 | 28.6 | 42.6 |
表5 UAVDT-M数据集上不同目标检测算法的对比实验结果
Tab. 5 Comparison experimental results of different target detection algorithms on UAVDT-M dataset
| 算法 | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 参数量/106 | 模型大小/MB | GFLOPs |
|---|---|---|---|---|---|---|---|
| YOLOv3-tiny | 92.3 | 75.9 | 87.3 | 65.2 | 12.1 | 24.4 | 18.9 |
| YOLOv5s | 97.6 | 96.7 | 99.1 | 80.1 | 9.1 | 17.7 | 24.0 |
| YOLOv6s | 97.4 | 96.8 | 99.1 | 81.2 | 16.3 | 32.8 | 44.9 |
| YOLOv8s | 97.7 | 97.2 | 99.2 | 83.8 | 11.1 | 21.5 | 28.7 |
| 本文算法 | 98.8 | 98.5 | 99.4 | 85.7 | 14.1 | 28.6 | 42.6 |
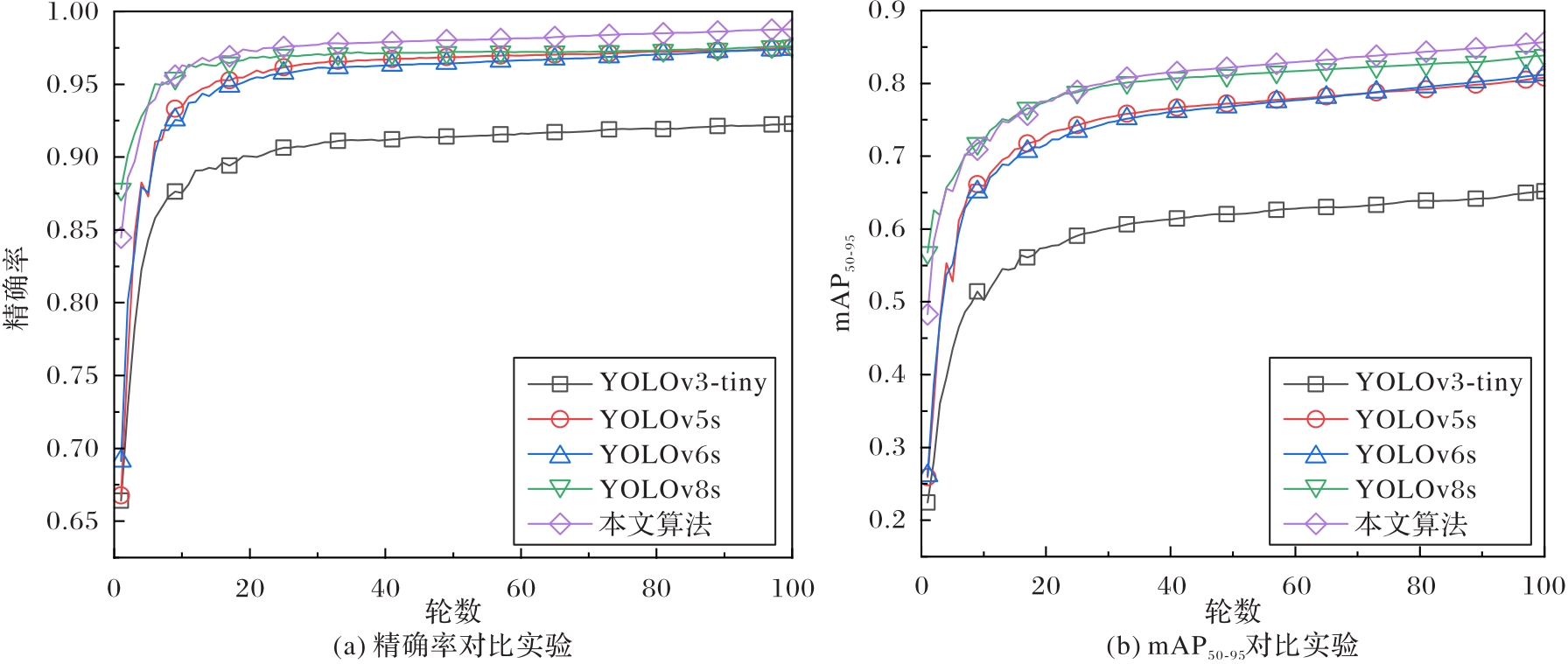
图7 不同算法的精确率和mAP对比实验结果(VAVDT-M)
Fig. 7 Comparison experimental results of different algorithms in precision and mAP (VAVDT-M)
| 算法 | WIoUv3 | CPMS | MultiSEAM | C2f-RFE | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 模型大小/MB | 参数量/106 | GFLOPs |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 50.9 | 38.2 | 39.3 | 23.5 | 22.5 | 11.1 | 28.5 | ||||
| B | √ | 51.3 | 38.6 | 40.0 | 23.6 | 22.5 | 11.1 | 28.7 | |||
| C | √ | √ | 53.2 | 39.7 | 40.2 | 23.4 | 23.8 | 11.7 | 29.6 | ||
| D | √ | √ | √ | 55.1 | 42.3 | 44.8 | 26.4 | 29.0 | 14.3 | 39.1 | |
| E | √ | √ | √ | √ | 56.8 | 44.0 | 45.6 | 27.1 | 28.4 | 14.1 | 39.9 |
表6 本文算法各模块的消融实验结果(VisDrone2019)
Tab.6 Ablation experimental results of different modules in proposed algorithm (VisDrone2019)
| 算法 | WIoUv3 | CPMS | MultiSEAM | C2f-RFE | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 模型大小/MB | 参数量/106 | GFLOPs |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 50.9 | 38.2 | 39.3 | 23.5 | 22.5 | 11.1 | 28.5 | ||||
| B | √ | 51.3 | 38.6 | 40.0 | 23.6 | 22.5 | 11.1 | 28.7 | |||
| C | √ | √ | 53.2 | 39.7 | 40.2 | 23.4 | 23.8 | 11.7 | 29.6 | ||
| D | √ | √ | √ | 55.1 | 42.3 | 44.8 | 26.4 | 29.0 | 14.3 | 39.1 | |
| E | √ | √ | √ | √ | 56.8 | 44.0 | 45.6 | 27.1 | 28.4 | 14.1 | 39.9 |
| 算法 | mAP50 /% | GFLOPs | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 33.5 | 7.2 | 41.3 |
| YOLOv8m | 43.7 | 78.7 | 82.7 |
| YOLOv8l | 44.5 | 165.4 | 63.3 |
| YOLOv8s | 39.3 | 28.5 | 100.3 |
| BGF-YOLOv10[ | 42.0 | — | 44.0 |
| YOLO-DroneMS[ | 31.2 | — | 83.3 |
| 本文算法 | 45.7 | 39.9 | 108.5 |
表7 不同小目标检测算法的性能比较
Tab.7 Performance comparison of different target detection algorithms
| 算法 | mAP50 /% | GFLOPs | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 33.5 | 7.2 | 41.3 |
| YOLOv8m | 43.7 | 78.7 | 82.7 |
| YOLOv8l | 44.5 | 165.4 | 63.3 |
| YOLOv8s | 39.3 | 28.5 | 100.3 |
| BGF-YOLOv10[ | 42.0 | — | 44.0 |
| YOLO-DroneMS[ | 31.2 | — | 83.3 |
| 本文算法 | 45.7 | 39.9 | 108.5 |

图8 低光照夜间环境
Fig.8 Low-light night-time environment

图9 复杂背景环境
Fig.9 Complex background environment
| [1] | GANESAN R, RAAJINI X M, NAYYAR A, et al. BOLD: bio-inspired optimized leader election for multiple drones[J]. Sensors, 2020, 20(11): No.3134. |
| [2] | BAI Y, ZHAO H, ZHANG X, et al. Towards autonomous multi-UAV wireless network: a survey of reinforcement learning-based approaches[J]. IEEE Communications Surveys and Tutorials, 2023, 25(4): 3038-3067. |
| [3] | GUPTA A, AFRIN T, SCULLY E, et al. Advances of UAVs toward future transportation: the state-of-the-art, challenges, and opportunities[J]. Future Transportation, 2021, 1(2): 326-350. |
| [4] | HILDMANN H, KOVACS E. Review: using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for disaster response, civil security and public safety[J]. Drones, 2019, 3(3): No.59. |
| [5] | TRAN T M, VU T N, NGUYEN T V, et al. UIT-ADrone: a novel drone dataset for traffic anomaly detection[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 5590-5601. |
| [6] | LU F, LI K, NIE Y, et al. Object detection of UAV images from orthographic perspective based on improved YOLOv5s[J]. Sustainability, 2023, 15(19): No.14564. |
| [7] | ZHANG H, SUN W, SUN C, et al. HSP-YOLOv8: UAV aerial photography small target detection algorithm[J]. Drones, 2024, 8(9): No.453. |
| [8] | NI J, ZHU S, TANG G, et al. A small-object detection model based on improved YOLOv8s for UAV image scenarios[J]. Remote Sensing, 2024, 16(13): No.2465. |
| [9] | LUO X, WU Y, ZHAO L. YOLOD: a target detection method for UAV aerial imagery[J]. Remote Sensing, 2022, 14(14): No.3240. |
| [10] | LI Y, FAN Q, HUANG H, et al. A modified YOLOv8 detection network for UAV aerial image recognition[J]. Drones, 2023, 7(5): No.304. |
| [11] | LOU H, DUAN X, GUO J, et al. DC-YOLOv8: small-size object detection algorithm based on camera sensor[J]. Electronics, 2023, 12(10): No.2323. |
| [12] | WANG G, CHEN Y, AN P, et al. UAV-YOLOv8: a small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23(16): No.7190. |
| [13] | WANG F, WANG H, QIN Z, et al. UAV target detection algorithm based on improved YOLOv8[J]. IEEE Access, 2023, 11: 116534-116544. |
| [14] | 刘涛,鞠事宏,高一萌. 基于改进YOLOv8n的无人机视角下小目标检测算法[J]. 计算机应用, 2024, 44(11): 3603-3609. |
| LIU T, JU S H, GAO Y M. Small object detection algorithm from drone perspective based on improved YOLOv8n[J]. Journal of Computer Applications, 2024, 44(11): 3603-3609. | |
| [15] | MA B, HUA Z, WEN Y, et al. Using an improved lightweight YOLOv8 model for real-time detection of multi-stage apple fruit in complex orchard environments[J]. Artificial Intelligence in Agriculture, 2024, 11: 70-82. |
| [16] | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| [17] | HUANG H, CHEN Z, ZOU Y, et al. Channel prior convolutional attention for medical image segmentation[J]. Computers in Biology and Medicine, 2024, 178: No.108784. |
| [18] | YU Z, HUANG H, CHEN W, et al. YOLO-FaceV2: a scale and occlusion aware face detector[J]. Pattern Recognition, 2024, 155: No.110714. |
| [19] | DENG L, BI L, LI H, et al. Lightweight aerial image object detection algorithm based on improved YOLOv5s[J]. Scientific Reports, 2023, 13: No.7817. |
| [20] | 张智,易华挥,郑锦. 聚焦小目标的航拍图像目标检测算法[J]. 电子学报, 2023, 51(4): 944-955. |
| ZHANG Z, YI H H, ZHENG J. Focusing on small objects detector in aerial images[J]. Acta Electronica Sinica, 2023, 51(4): 944-955. | |
| [21] | XU H, ZHENG W, LIU F, et al. Unmanned aerial vehicle perspective small target recognition algorithm based on improved YOLOv5[J]. Remote Sensing, 2023, 15(14): No.3583. |
| [22] | ALBABA B M, OZER S. SyNet: an ensemble network for object detection in UAV images[C]// Proceedings of the 25th International Conference on Pattern Recognition. Piscataway: IEEE, 2021: 10227-10234. |
| [23] | DU D, WEN L, ZHU P, et al. VisDrone-DET2020: the vision meets drone object detection in image challenge results[C]// Proceedings of the 2020 European Conference on Computer Vision Workshops, LNCS 12538. Cham: Springer, 2020: 692-712. |
| [24] | WAN Y, ZHONG Y, HUANG Y, et al. ARSD: an adaptive region selection object detection framework for UAV images[J]. Drones, 2022, 6(9): No.228. |
| [25] | ZHANG P, ZHONG Y, LI X. SlimYOLOv3: narrower, faster and better for real-time UAV applications[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshops. Piscataway: IEEE, 2019: 37-45. |
| [26] | ZHAO H, ZHOU Y, ZHANG L, et al. Mixed YOLOv3-LITE: a lightweight real-time object detection method[J]. Sensors, 2020, 20(7): No.1816. |
| [27] | ALI S, SIDDIQUE A, ATEŞ H F, et al. Improved YOLOv4 for aerial object detection[C]// Proceedings of the 29th Signal Processing and Communications Applications Conference. Piscataway: IEEE, 2021: 1-4. |
| [28] | MA C, FU Y, WANG D, et al. YOLO-UAV: object detection method of unmanned aerial vehicle imagery based on efficient multi-scale feature fusion[J]. IEEE Access, 2023, 11: 126857-126878. |
| [29] | 冒国韬,邓天民,于楠晶. 基于多尺度分割注意力的无人机航拍图像目标检测算法[J]. 航空学报, 2023, 44(5): 273-283. |
| MAO G T, DENG T M, YU N J. Object detection in UAV images based on multi-scale split attention[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 273-283. | |
| [30] | MEI J, ZHU W. BGF-YOLOv10: small object detection algorithm from unmanned aerial vehicle perspective based on improved YOLOv10[J]. Sensors, 2024, 24(21): No.6911. |
| [31] | ZHAO X, CHEN Y. YOLO-DroneMS: multi-scale object detection network for Unmanned Aerial Vehicle (UAV) images[J]. Drones, 2024, 8(11): No.609. |
| [1] | 郭伟, 王曼婷, 曲海成. 基于多尺度感知的多维空间融合水下图像增强算法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 224-232. |
| [2] | 王婷婷, 李廷顺, 谭文, 吕博, 陈翼轩. 基于多尺度Patch与卷积交互的电缆温度预测模型[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 314-321. |
| [3] | 马英杰, 覃晶滢, 赵耿, 肖靖. 面向物联网图像的深度压缩感知网络及其混沌加密保护方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 144-151. |
| [4] | 麦超云, 张洪燚, 秦传波, 曾军英, 王栋. 基于多尺度与空间频率特征的嗜铬细胞瘤图像分割网络[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 280-288. |
| [5] | 边小勇, 袁培洋, 胡其仁. 双编码空频混合的红外小目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 252-259. |
| [6] | 梁一鸣, 范菁, 柴汶泽. 基于双向交叉注意力的多尺度特征融合情感分类[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2773-2782. |
| [7] | 颜承志, 陈颖, 钟凯, 高寒. 基于多尺度网络与轴向注意力的3D目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2537-2545. |
| [8] | 汤恒先, 姚远, 康浩翔. 基于容器的规模化无人机集群仿真引擎研究与实现[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2704-2711. |
| [9] | 陈亮, 王璇, 雷坤. 复杂场景下跨层多尺度特征融合的安全帽佩戴检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2333-2341. |
| [10] | 陈丹阳, 张长伦. 多尺度去相关的图卷积网络模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2180-2187. |
| [11] | 范博淦, 王淑青, 陈开元. 基于改进YOLOv8的航拍无人机小目标检测模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2342-2350. |
| [12] | 李姝, 刘国庆, 李思远, 秦耀昌. 大范围复杂环境下多无人机的快速全自主探索方法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2317-2324. |
| [13] | 王向, 崔倩倩, 张晓明, 王建超, 王震洲, 宋佳霖. 改进ConvNeXt的无线胶囊内镜图像分类模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 2016-2024. |
| [14] | 陈盈涛, 方康康, 张金敖, 梁浩然, 郭焕斌, 邱兆文. 基于多尺度空间特征的冠状动脉CT血管造影图像分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 2007-2015. |
| [15] | 周天彤, 郑妍琪, 魏韬, 戴亚康, 邹凌. 融合变分图自编码器与局部-全局图网络的认知负荷脑电识别模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1849-1857. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||