


《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (3): 810-817.DOI: 10.11772/j.issn.1001-9081.2021040860
所属专题: 人工智能; 2021年中国计算机学会人工智能会议(CCFAI 2021)
• 2021年中国计算机学会人工智能会议(CCFAI 2021) • 上一篇 下一篇
李讷1, 徐光柱1,2( ), 雷帮军1,2, 马国亮3, 石勇涛1,2
), 雷帮军1,2, 马国亮3, 石勇涛1,2
收稿日期:2021-05-25
修回日期:2021-06-23
接受日期:2021-06-25
发布日期:2021-11-09
出版日期:2022-03-10
通讯作者:
徐光柱
作者简介:李讷(1996—),女,山西长治人,硕士研究生,CCF会员,主要研究方向:数字图像处理、目标检测基金资助:
Ne LI1, Guangzhu XU1,2(), Bangjun LEI1,2, Guoliang MA3, Yongtao SHI1,2
Received:2021-05-25
Revised:2021-06-23
Accepted:2021-06-25
Online:2021-11-09
Published:2022-03-10
Contact:
Guangzhu XU
About author:LI Ne, born in 1996, M. S. candidate. Her research interests include digital image processing, target detection.Supported by:摘要:
为解决交通道路行驶车辆车标识别中存在的目标小、噪声大、种类多的问题,提出了一种基于深度学习的目标检测算法与基于形态学模板匹配算法相结合的方法,并设计了一种高准确度且能应对新类型车标的识别系统。首先,采用通过K-Means++重新聚类锚框值,并引入残差网络的YOLOv4进行车标的一步定位;其次,通过对标准车标图像进行预处理及分割,构建二值车标模板库;接着,利用带色彩恢复的多尺度视网膜图像增强算法(MSRCR)、最大类间方差法(OTSU)等对定位到的车标进行预处理;最后,将处理好的车标与模板库中的标准车标进行汉明距离计算,求出最佳匹配。车标检测实验中,改进的YOLOv4检测精度均优于原始YOLOv4、基于车牌位置的车标两步定位法和基于散热器栅格背景的车标定位法,达到99.04%;速度略低于原始YOLOv4,高于另外两者,达到每秒50.62帧。车标识别实验中基于形态学模板匹配的识别精度均高于传统的方向梯度直方图(HOG)、局部二值模式(LBP)和卷积神经网络,达到92.68%。实验结果表明基于深度学习的车标检测算法有较高的精度和较快的速度,形态学模板匹配方法在光照变化和噪声污染的情况下仍能保持较高的识别精度。
中图分类号:
李讷, 徐光柱, 雷帮军, 马国亮, 石勇涛. 交通道路行驶车辆车标识别算法[J]. 计算机应用, 2022, 42(3): 810-817.
Ne LI, Guangzhu XU, Bangjun LEI, Guoliang MA, Yongtao SHI. Logo recognition algorithm for vehicles on traffic road[J]. Journal of Computer Applications, 2022, 42(3): 810-817.
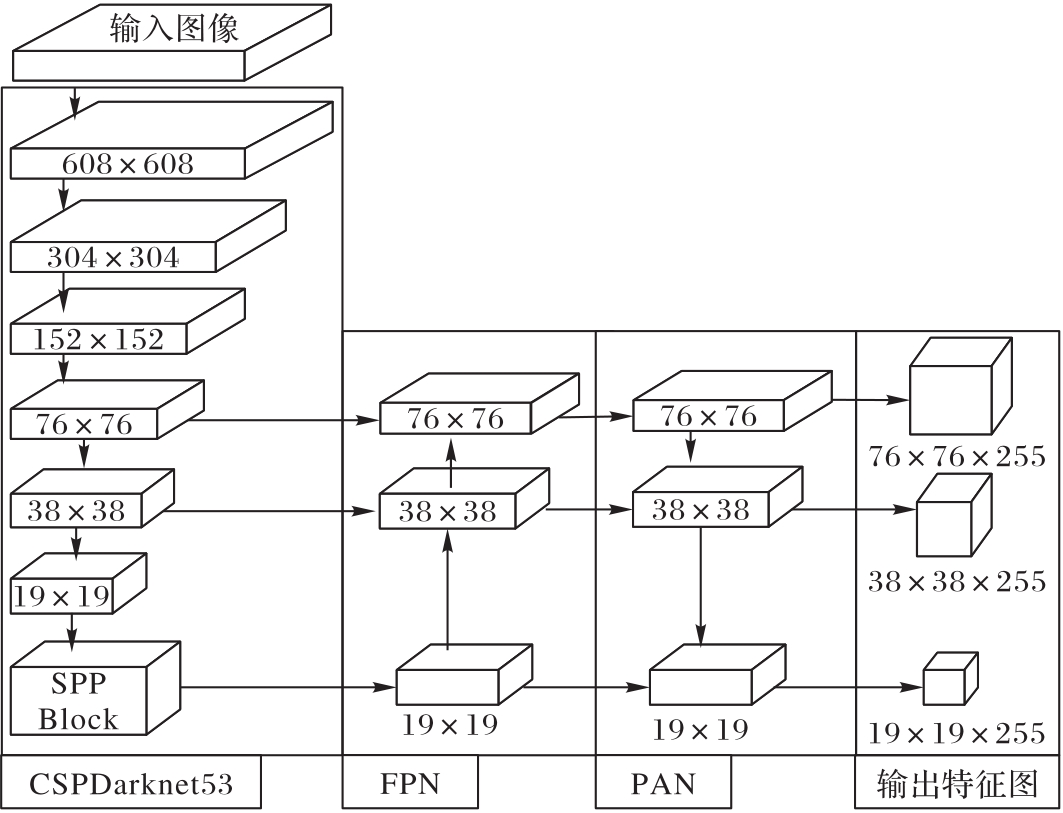
图1 YOLOv4网络结构
Fig. 1 Network structure of YOLOv4

图2 残差学习单元
Fig. 2 Residual learning unit

图3 密集连接块
Fig. 3 DenseNet block

图4 改进后的YOLOv4输出层
Fig. 4 Output layer of improved YOLOv4

图5 车标二值化
Fig. 5 Vehicle logo binarization

图6 车标模板库
Fig. 6 Vehicle logo template library
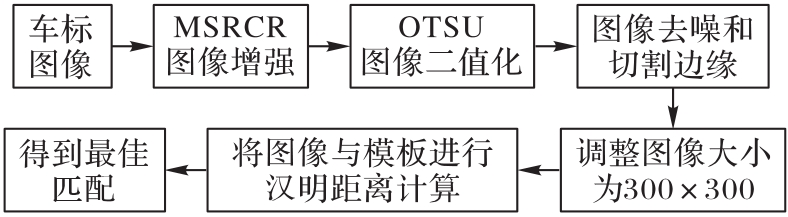
图7 模板匹配流程
Fig. 7 Flowchart of template matching

图8 原始图像和MSRCR增强图像后的OTSU二值化图像
Fig. 8 OTSU binarized images of original image and MSRCR enhanced image

图9 不同二值化算法处理后的效果对比
Fig. 9 Processing effect comparison of different binarization algorithms

图10 汉明距离计算原理
Fig. 10 Calculation principle of Hamming distance

图11 车标检测数据集
Fig. 11 Vehicle logo detection dataset
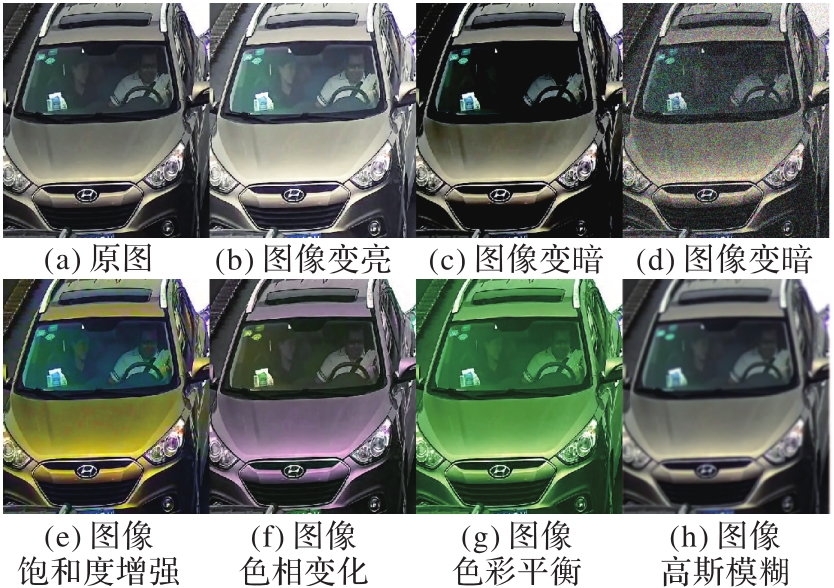
图12 数据扩增效果
Fig. 12 Data augmentation effect

图13 实验流程
Fig. 13 Experimental flowchart
| 数据集类型 | 训练集 | 测试集 |
|---|---|---|
| 车辆正面 | 18 000 | 6 500 |
| 车辆背面 | 8 000 | 2 500 |
| 车辆侧面 | 4 000 | 1 000 |
表1 实验数据集类型分布
Tab. 1 Distribution of experimental dataset types
| 数据集类型 | 训练集 | 测试集 |
|---|---|---|
| 车辆正面 | 18 000 | 6 500 |
| 车辆背面 | 8 000 | 2 500 |
| 车辆侧面 | 4 000 | 1 000 |
| 算法 | 准确率/% | 召回率/% | 速度/fps |
|---|---|---|---|
| YOLOv4 | 97.38 | 97.43 | 50.64 |
| K-Means++_YOLOv4 | 98.04 | 98.00 | 50.64 |
| ResNet_YOLOv4 | 98.37 | 98.40 | 50.62 |
| 本文算法 | 99.04 | 98.27 | 50.62 |
表2 原始YOLOv4和改进的YOLOv4车标检测结果
Tab. 2 Vehicle logo detection results of original YOLOv4 and improved YOLOv4
| 算法 | 准确率/% | 召回率/% | 速度/fps |
|---|---|---|---|
| YOLOv4 | 97.38 | 97.43 | 50.64 |
| K-Means++_YOLOv4 | 98.04 | 98.00 | 50.64 |
| ResNet_YOLOv4 | 98.37 | 98.40 | 50.62 |
| 本文算法 | 99.04 | 98.27 | 50.62 |
| 算法 | 测试集 | 正确数 | 准确率/% | 平均时间/s |
|---|---|---|---|---|
| 文献[ | 200 | 168 | 84.0 | 0.862 0 |
| 文献[ | 200 | 173 | 86.5 | 1.224 6 |
| YOLOv4 | 200 | 197 | 98.5 | 0.005 0 |
| 本文算法 | 200 | 200 | 100.0 | 0.005 2 |
表3 不同车标定位算法的准确率和时间结果
Tab. 3 Accuracy and time results of different vehicle logo positioning algorithms
| 算法 | 测试集 | 正确数 | 准确率/% | 平均时间/s |
|---|---|---|---|---|
| 文献[ | 200 | 168 | 84.0 | 0.862 0 |
| 文献[ | 200 | 173 | 86.5 | 1.224 6 |
| YOLOv4 | 200 | 197 | 98.5 | 0.005 0 |
| 本文算法 | 200 | 200 | 100.0 | 0.005 2 |

图14 本文算法车标检测效果
Fig. 14 Vehicle logo detection effect of proposed algorithm

图15 本文算法对微小车标检测效果
Fig. 15 Small vehicle logo detection effect of proposed algorithm

图16 未知车标检测效果
Fig. 16 Effect of unknown vehicle logo detection

图17 模板匹配结果
Fig. 17 Result of template matching
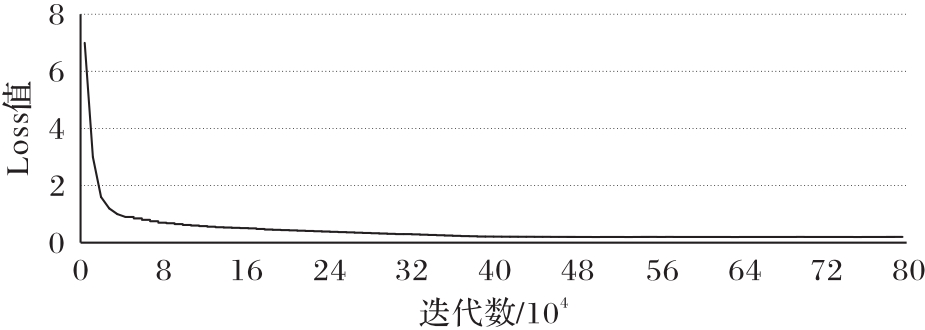
图18 分类网络损失函数变化曲线
Fig. 18 Loss function change curve of classification network
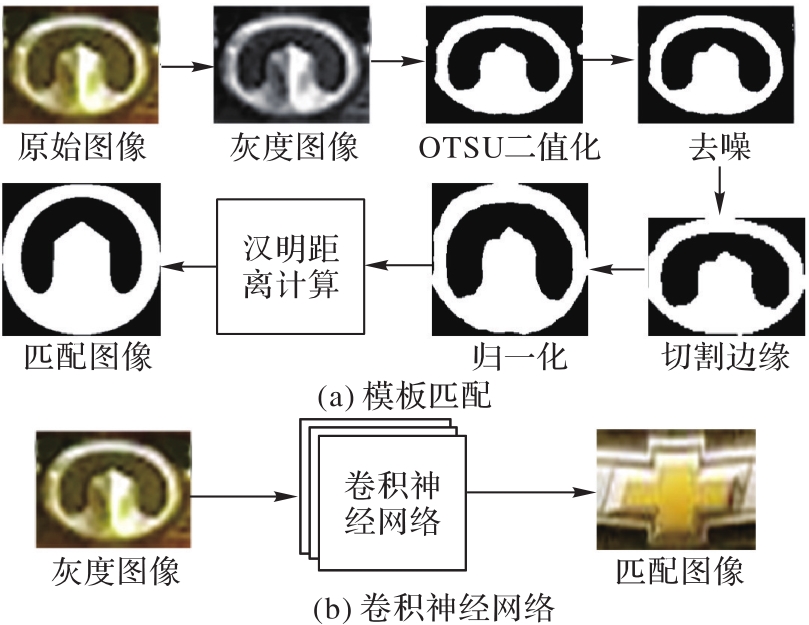
图19 不同方法对同一车标的识别过程
Fig. 19 Recognition process of the same vehicle logo by different methods
| 序号 | 车标名称 | 测试集样本数 | 模板匹配 | DenseNet201 | ||
|---|---|---|---|---|---|---|
| 正确数 | 准确率/% | 正确数 | 准确率/% | |||
| 1 | 讴歌 | 116 | 116 | 100.00 | 101 | 87.07 |
| 2 | 北京汽车 | 102 | 87 | 85.29 | 85 | 83.33 |
| 3 | 北汽幻速 | 174 | 157 | 90.23 | 158 | 90.80 |
| 4 | 宝骏 | 159 | 147 | 92.45 | 140 | 88.05 |
| 5 | 宝马 | 173 | 163 | 94.22 | 153 | 88.44 |
| 6 | 比亚迪 | 132 | 115 | 87.12 | 104 | 78.79 |
| 7 | 凯迪拉克 | 100 | 86 | 86.00 | 86 | 86.00 |
| 8 | 长安之星 | 130 | 118 | 90.77 | 113 | 86.92 |
| 9 | 奇瑞 | 121 | 103 | 85.12 | 96 | 79.34 |
| 10 | 沃尔沃 | 172 | 168 | 97.67 | 160 | 93.02 |
| 11 | 广汽传祺 | 124 | 116 | 93.55 | 113 | 91.13 |
| 12 | 铃木 | 166 | 161 | 96.99 | 154 | 92.77 |
| 13 | 江淮 | 231 | 208 | 90.04 | 227 | 98.27 |
| 14 | 东风 | 131 | 115 | 87.79 | 121 | 92.37 |
| 15 | 福田 | 122 | 112 | 91.80 | 109 | 89.34 |
| 16 | 三菱 | 180 | 178 | 98.89 | 169 | 93.89 |
| 17 | 尼桑 | 194 | 184 | 94.85 | 181 | 93.30 |
表4 模板匹配与深度学习方法车标识别结果比对
Tab. 4 Comparison of vehicle logo recognition results between template matching and deep learning methods
| 序号 | 车标名称 | 测试集样本数 | 模板匹配 | DenseNet201 | ||
|---|---|---|---|---|---|---|
| 正确数 | 准确率/% | 正确数 | 准确率/% | |||
| 1 | 讴歌 | 116 | 116 | 100.00 | 101 | 87.07 |
| 2 | 北京汽车 | 102 | 87 | 85.29 | 85 | 83.33 |
| 3 | 北汽幻速 | 174 | 157 | 90.23 | 158 | 90.80 |
| 4 | 宝骏 | 159 | 147 | 92.45 | 140 | 88.05 |
| 5 | 宝马 | 173 | 163 | 94.22 | 153 | 88.44 |
| 6 | 比亚迪 | 132 | 115 | 87.12 | 104 | 78.79 |
| 7 | 凯迪拉克 | 100 | 86 | 86.00 | 86 | 86.00 |
| 8 | 长安之星 | 130 | 118 | 90.77 | 113 | 86.92 |
| 9 | 奇瑞 | 121 | 103 | 85.12 | 96 | 79.34 |
| 10 | 沃尔沃 | 172 | 168 | 97.67 | 160 | 93.02 |
| 11 | 广汽传祺 | 124 | 116 | 93.55 | 113 | 91.13 |
| 12 | 铃木 | 166 | 161 | 96.99 | 154 | 92.77 |
| 13 | 江淮 | 231 | 208 | 90.04 | 227 | 98.27 |
| 14 | 东风 | 131 | 115 | 87.79 | 121 | 92.37 |
| 15 | 福田 | 122 | 112 | 91.80 | 109 | 89.34 |
| 16 | 三菱 | 180 | 178 | 98.89 | 169 | 93.89 |
| 17 | 尼桑 | 194 | 184 | 94.85 | 181 | 93.30 |
| 序号 | 车标名称 | 测试集样本数 | 准确率/% | |||
|---|---|---|---|---|---|---|
| HOG | LBP | DenseNet201 | 本文方法 | |||
| 平均准确率 | 86.59 | 90.87 | 92.16 | 92.68 | ||
| 1 | 奥迪 | 150 | 86.67 | 88.67 | 88.00 | 92.00 |
| 2 | 中国一汽 | 150 | 87.33 | 89.33 | 88.67 | 88.00 |
| 3 | 雪铁龙 | 200 | 88.00 | 90.00 | 95.00 | 86.00 |
| 4 | 大众 | 200 | 95.00 | 94.00 | 98.50 | 99.00 |
| 5 | 现代 | 150 | 75.00 | 93.33 | 94.00 | 93.33 |
| 6 | 雪佛兰 | 150 | 80.00 | 90.67 | 95.33 | 96.00 |
| 7 | 长安 | 200 | 85.00 | 92.50 | 90.50 | 93.50 |
| 8 | 丰田 | 100 | 87.00 | 89.00 | 94.00 | 87.00 |
| 9 | 本田 | 200 | 91.00 | 89.50 | 86.50 | 93.50 |
| 10 | 奔驰 | 150 | 90.67 | 92.00 | 85.33 | 89.33 |
| 11 | 长城 | 150 | 92.00 | 87.33 | 96.00 | 93.33 |
| 12 | 马自达 | 200 | 74.00 | 89.00 | 97.00 | 94.50 |
| 13 | 五菱宏光 | 150 | 94.00 | 96.00 | 89.33 | 99.33 |
表5 不同方法车标识别准确率结果对比
Tab. 5 Comparison of vehicle logo recognition results by different methods
| 序号 | 车标名称 | 测试集样本数 | 准确率/% | |||
|---|---|---|---|---|---|---|
| HOG | LBP | DenseNet201 | 本文方法 | |||
| 平均准确率 | 86.59 | 90.87 | 92.16 | 92.68 | ||
| 1 | 奥迪 | 150 | 86.67 | 88.67 | 88.00 | 92.00 |
| 2 | 中国一汽 | 150 | 87.33 | 89.33 | 88.67 | 88.00 |
| 3 | 雪铁龙 | 200 | 88.00 | 90.00 | 95.00 | 86.00 |
| 4 | 大众 | 200 | 95.00 | 94.00 | 98.50 | 99.00 |
| 5 | 现代 | 150 | 75.00 | 93.33 | 94.00 | 93.33 |
| 6 | 雪佛兰 | 150 | 80.00 | 90.67 | 95.33 | 96.00 |
| 7 | 长安 | 200 | 85.00 | 92.50 | 90.50 | 93.50 |
| 8 | 丰田 | 100 | 87.00 | 89.00 | 94.00 | 87.00 |
| 9 | 本田 | 200 | 91.00 | 89.50 | 86.50 | 93.50 |
| 10 | 奔驰 | 150 | 90.67 | 92.00 | 85.33 | 89.33 |
| 11 | 长城 | 150 | 92.00 | 87.33 | 96.00 | 93.33 |
| 12 | 马自达 | 200 | 74.00 | 89.00 | 97.00 | 94.50 |
| 13 | 五菱宏光 | 150 | 94.00 | 96.00 | 89.33 | 99.33 |
| 1 | 蒋菠. 基于视频图像的汽车车标检测技术研究与实现[D].成都:西南交通大学,2012: 1-2. |
| JIANG B. Research and implementation of vehicle logo detection technology based on video images [D]. Chengdu: Southwest Jiaotong University, 2012:1-2. | |
| 2 | 李哲,于梦茹.基于多种LBP特征集成学习的车标识别[J].计算机工程与应用,2019,55(20):134-138. 10.3778/j.issn.1002-8331.1806-0330 |
| LI Z, YU M R. Vehicle logo recognition based on integrated learning of multiple LBP features[J]. Computer Engineering and Applications, 2019, 55(20): 134-138. 10.3778/j.issn.1002-8331.1806-0330 | |
| 3 | 杨正云,王林.视频监控系统中运动车辆的车标识别技术[J].遵义师范学院学报,2016,18(3):110-114. 10.3969/j.issn.1009-3583.2016.03.027 |
| YANG Z Y, WANG L. Vehicle logo recognition technology for moving vehicles in video surveillance system [J]. Journal of Zunyi Normal University, 2016, 18(3): 110-114. 10.3969/j.issn.1009-3583.2016.03.027 | |
| 4 | 李熙莹,吕硕,袁敏贤,等.基于散热器栅格背景精确分类的车标定位方法[J].计算机工程与应用,2017,53(2):206-213. 10.3778/j.issn.1002-8331.1604-0189 |
| LI X Y, LYU S, YUAN M X, et al. Vehicle logo positioning method based on accurate classification of radiator grid background[J]. Computer Engineering and Applications, 2017, 53(2): 206-213. 10.3778/j.issn.1002-8331.1604-0189 | |
| 5 | 张闯,王景龙.OPENCV在汽车车标识别中的研究与实践[J].福建电脑,2020,36(11):1-4. |
| ZHANG C, WANG J L. Research and practice of OPENCV in vehicle logo recognition[J]. Fujian Computer, 2020, 36(11): 1-4. | |
| 6 | 李哲,于梦茹.基于改进的HOG与LBP特征值的车标识别方法[J].计算机与数字工程,2019,47(12):3154-3159. |
| LI Z, YU M R. Vehicle logo recognition method based on improved HOG and LBP features[J]. Computer and Digital Engineering, 2019, 47(12): 3154-3159. | |
| 7 | 耿庆田,于繁华,王宇婷,等.基于SIFT的车标识别算法[J].吉林大学学报(理学版),2018,56(3):639-644. 10.3788/OPE.20182605.1267 |
| GENG Q T, YU F H, WANG Y T, et al. Vehicle logo recognition algorithm based on SIFT[J]. Journal of Jilin University (Science Edition), 2018, 56(3): 639-644. 10.3788/OPE.20182605.1267 | |
| 8 | 张硕.基于Adaboost的车标识别方法研究[J].中国安防,2014(5):85-89. 10.3969/j.issn.1673-7873.2014.03.017 |
| ZHANG S. Research on vehicle logo recognition method based on Adaboost[J]. China Security, 2014(5):85-89. 10.3969/j.issn.1673-7873.2014.03.017 | |
| 9 | HUANG Y, WU R, SUN Y, et al. Vehicle logo recognition system based on convolutional neural networks with a pretraining strategy [J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(4):1951-1960. 10.1109/tits.2014.2387069 |
| 10 | 叶玉双,杨洁.基于MFC+opencv的车标识别系统[J].计算机时代,2020(12):6-9. |
| YE Y S, YANG J. Vehicle logo recognition system based on MFC+OpenCV[J]. Computer Era, 2020(12): 6-9. | |
| 11 | GIRSHICK R, DONAHUE J, DARRELL T. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. 10.1109/cvpr.2014.81 |
| 12 | GIRSHICK R. Fast R-CNN[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015:1440-1448. 10.1109/iccv.2015.169 |
| 13 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016, 39(6): 1137-1149. 10.1109/tpami.2016.2577031 |
| 14 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 15 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 7263-7271. 10.1109/cvpr.2017.690 |
| 16 | REDMON J, FARHADI A. YOLOv3: an incremental improvement[C]// Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition, Piscataway: IEEE, 2018:1-6. 10.1109/cvpr.2018.00430 |
| 17 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection[J]. Computer Vision and Pattern Recognition, 2020,17(9):198-215. |
| 18 | WANG C Y, LIAO H Y M, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2020: 390-391. 10.1109/cvprw50498.2020.00203 |
| 19 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(9):1904-1916. 10.1109/tpami.2015.2389824 |
| 20 | WANG K, LIEW J H, ZOU Y, et al. PANet: few-shot image semantic segmentation with prototype alignment [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 9197-9206. 10.1109/iccv.2019.00929 |
| 21 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2117-2125. 10.1109/cvpr.2017.106 |
| 22 | MISRA D. Mish: A self regularized non-monotonic neural activation function[EB/OL]. [2021-06-04]. . |
| 23 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| 24 | HUANG G, LIU Z, MAATEN L VAN DER, et al. Densely connected convolutional networks[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4700-4708. 10.1109/cvpr.2017.243 |
| 25 | VASSILVITSKII S, ARTHUR D. K-means++: the advantages of careful seeding[C]// Proceedings of the 18th Annual ACM-SIAM Symposium on Discrete Algorithms. Piscataway: IEEE, 2006: 1027-1035. |
| 26 | JOBSON D J, RAHMAN Z, WOODELL G A. A multiscale retinex for bridging the gap between color images and the human observation of scenes[J]. IEEE Transactions on Image Processing, 1997, 6(7): 965-976. 10.1109/83.597272 |
| 27 | 徐建东.基于最小二乘法拟合的Otsu快速图像分割方法[J].常州大学学报(自然科学版),2021,33(1):70-76. |
| XU J D. Otsu fast image segmentation method based on least square fitting[J]. Journal of Changzhou University (Natural Science Edition), 2021, 33(1): 70-76. | |
| 28 | 时春霖,杨培章,张超,等.基于Kittler最小误差分割算法的小视场星图分割[J].西南交通大学学报, 2021,56(1):168-175. |
| SHI C L, YANG P Z, ZHANG C, et al. Small field of view star image segmentation based on Kittler minimum error segmentation algorithm[J]. Journal of Southwest Jiaotong University, 2021, 56(1):168-175. | |
| 29 | 田梦娜,徐泮林,丁鹏文.基于Matlab的边缘检测算法研究[J].测绘与空间地理信息,2020,43(2):197-199. 10.3969/j.issn.1672-5867.2020.02.056 |
| TIAN M N, XU P L, DING P W. Research on edge detection algorithm based on Matlab[J]. Surveying and Spatial Geographic Information, 2020, 43(2):197-199. 10.3969/j.issn.1672-5867.2020.02.056 | |
| 30 | 李迪,徐光柱,王亚文,等.反馈式ICM神经网络和FPF相结合的剪影识别[J].广西大学学报(自然科学版),2018,43(3):1089-1096. |
| LI D, XU G Z, WANG Y W, et al. Silhouette recognition combined with feedback ICM neural network and FPF[J]. Journal of Guangxi University (Natural Science Edition), 2018, 43(3):1089-1096. | |
| 31 | HUANG Y, WU R, SUN Y, et al. Vehicle logo recognition system based on convolutional neural networks with a pretraining strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4):1951-1960. 10.1109/tits.2014.2387069 |
| 32 | YE Y, WANG J, LU J, et al. Vehicle logo recognition based on overlapping enhanced patterns of oriented edge magnitudes[J]. Computers & Electrical Engineering, 2018, 71:273-283. 10.1016/j.compeleceng.2018.07.045 |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 秦璟, 秦志光, 李发礼, 彭悦恒. 基于概率稀疏自注意力神经网络的重性抑郁疾患诊断[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2970-2974. |
| [3] | 王熙源, 张战成, 徐少康, 张宝成, 罗晓清, 胡伏原. 面向手术导航3D/2D配准的无监督跨域迁移网络[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2911-2918. |
| [4] | 黄云川, 江永全, 黄骏涛, 杨燕. 基于元图同构网络的分子毒性预测[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2964-2969. |
| [5] | 杨鑫, 陈雪妮, 吴春江, 周世杰. 结合变种残差模型和Transformer的城市公路短时交通流预测[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2947-2951. |
| [6] | 李顺勇, 李师毅, 胥瑞, 赵兴旺. 基于自注意力融合的不完整多视图聚类算法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2696-2703. |
| [7] | 付帅, 郭小英, 白茹意, 闫涛, 陈斌. 改进的CloFormer模型与有序回归相结合的年龄评估方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2372-2380. |
| [8] | 陈彤, 杨丰玉, 熊宇, 严荭, 邱福星. 基于多尺度频率通道注意力融合的声纹库构建方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2407-2413. |
| [9] | 刘禹含, 吉根林, 张红苹. 基于骨架图与混合注意力的视频行人异常检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2551-2557. |
| [10] | 顾焰杰, 张英俊, 刘晓倩, 周围, 孙威. 基于时空多图融合的交通流量预测[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2618-2625. |
| [11] | 石乾宏, 杨燕, 江永全, 欧阳小草, 范武波, 陈强, 姜涛, 李媛. 面向空气质量预测的多粒度突变拟合网络[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2643-2650. |
| [12] | 赵亦群, 张志禹, 董雪. 基于密集残差物理信息神经网络的各向异性旅行时计算方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2310-2318. |
| [13] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [14] | 龙伍丹, 彭博, 胡节, 申颖, 丁丹妮. 基于加强特征提取的道路病害检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2264-2270. |
| [15] | 刘瑞华, 郝子赫, 邹洋杨. 基于多层级精细特征融合的步态识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2250-2257. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||