


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (9): 2938-2946.DOI: 10.11772/j.issn.1001-9081.2023091342
穆凌霞1, 周政君1, 王斑2( ), 张友民3, 薛向宏1, 宁凯凯1
), 张友民3, 薛向宏1, 宁凯凯1
收稿日期:2023-10-07
修回日期:2023-12-07
接受日期:2023-12-12
发布日期:2024-03-15
出版日期:2024-09-10
通讯作者:
王斑
作者简介:穆凌霞(1988—),女,江苏盐城人,副教授,博士,主要研究方向:自主轨迹规划、制导与控制基金资助:
Lingxia MU1, Zhengjun ZHOU1, Ban WANG2(), Youmin ZHANG3, Xianghong XUE1, Kaikai NING1
Received:2023-10-07
Revised:2023-12-07
Accepted:2023-12-12
Online:2024-03-15
Published:2024-09-10
Contact:
Ban WANG
About author:MU Lingxia, born in 1988, Ph. D., associate professor. Her research interests include autonomous trajectory planning, guidance and control.Supported by:摘要:
针对多无人机(UAV)编队飞行过程中的避障和故障问题,提出一种编队动态变换与重构方法。编队内UAV将障碍物和其余UAV作为动态威胁,根据当前飞行环境自适应地改变航迹评价函数的得分权重,提高编队在动态环境下的避障能力;当编队中某一UAV故障时,对剩余UAV进行编队队形重构,改变动态窗口法(DWA)目标函数中僚机相对于长机的位置,实时调整得到新的编队,从而实现容错编队飞行。仿真实验结果表明,所提编队避障和重构方法能够实现动态避障以及单机故障或动力不足情况下的容错编队飞行;与传统DWA相比,所得到的编队无人机间距离误差更小。
中图分类号:
穆凌霞, 周政君, 王斑, 张友民, 薛向宏, 宁凯凯. 多无人机编队避障和编队重构方法[J]. 计算机应用, 2024, 44(9): 2938-2946.
Lingxia MU, Zhengjun ZHOU, Ban WANG, Youmin ZHANG, Xianghong XUE, Kaikai NING. Formation obstacle-avoidance and reconfiguration method for multiple UAVs[J]. Journal of Computer Applications, 2024, 44(9): 2938-2946.
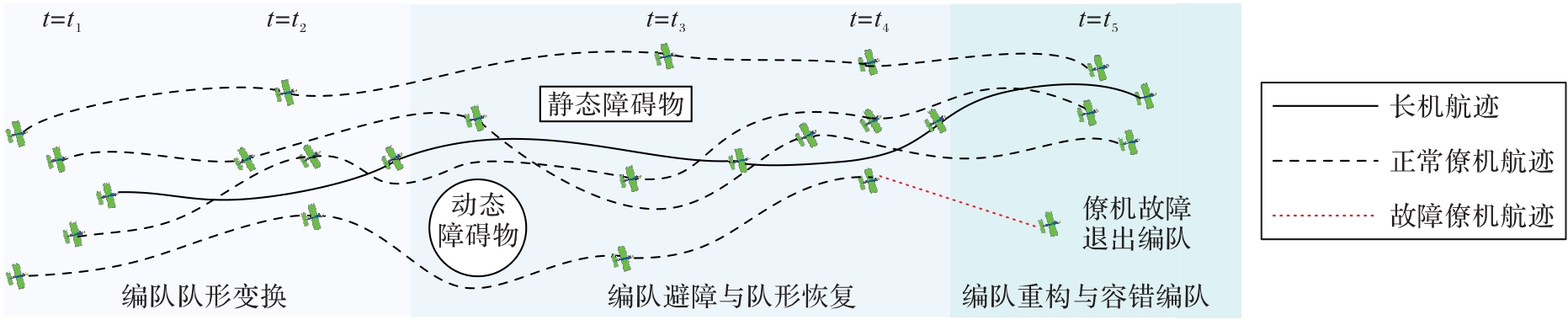
图1 多机编队规划问题描述
Fig. 1 Description of multi-UAV formation planning problem

图2 本文方法的流程
Fig. 2 Flow of proposed method

图3 长机-僚机编队
Fig. 3 Leader-follower formation
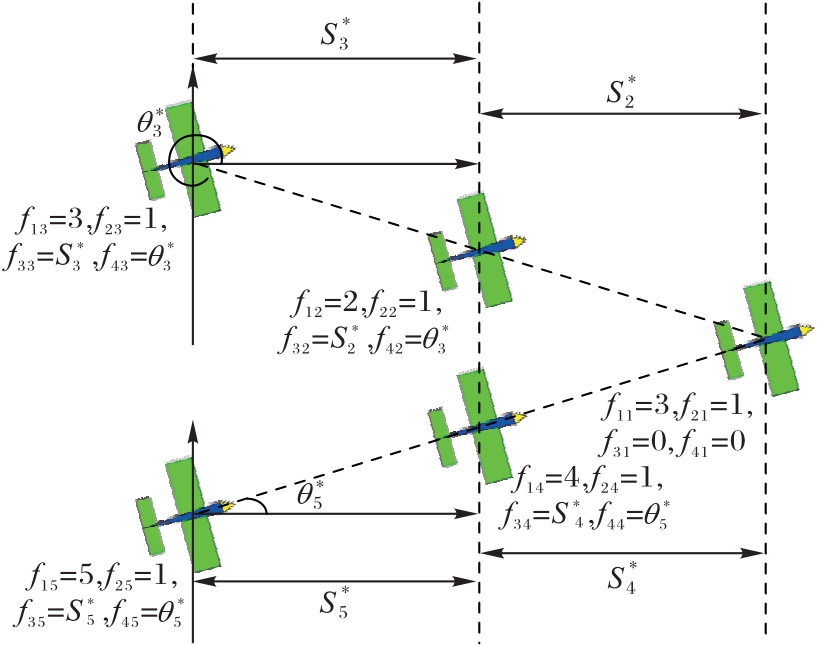
图4 编队队形信息
Fig. 4 Formation shape information
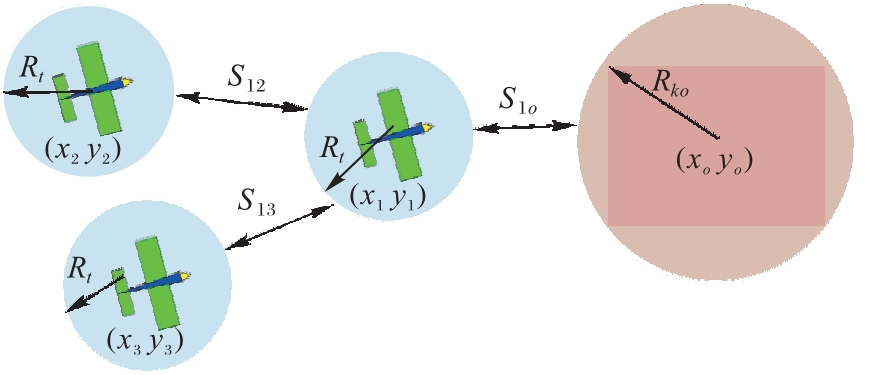
图5 编队避障示例
Fig. 5 Example of formation obstacle avoidance
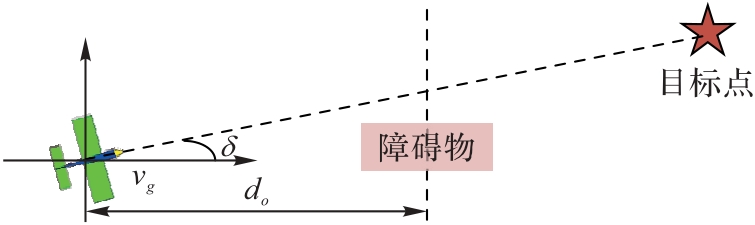
图6 无人机评价函数示例
Fig. 6 Example of UAV evaluation function
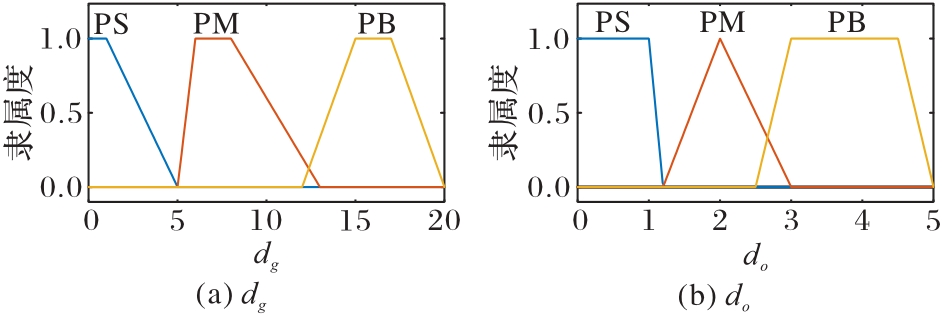
图7 模糊规则输入量隶属度函数
Fig. 7 Input variable membership functions of fuzzy rules
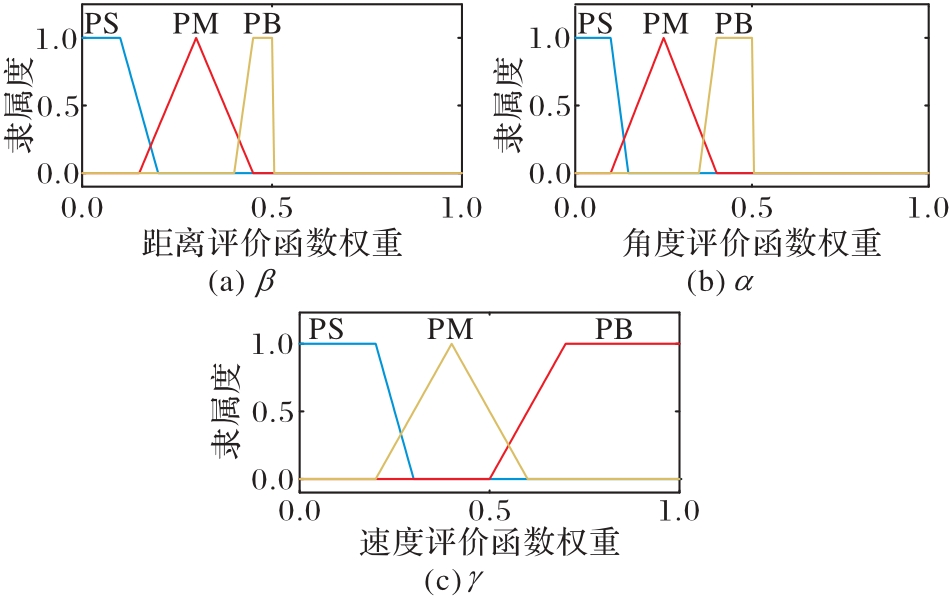
图8 模糊规则输出量隶属度函数
Fig. 8 Output variable membership functions of fuzzy rules
| 序号 | 输入 | 输出 | |||
|---|---|---|---|---|---|
| dg | do | α | β | γ | |
| 1 | PS | PB | PB | PM | PS |
| 2 | PS | PM | PB | PM | PS |
| 3 | PS | PB | PB | PS | PS |
| 4 | PM | PB | PS | PB | PS |
| 5 | PM | PM | PM | PM | PS |
| 6 | PM | PB | PM | PS | PB |
| 7 | PS | PB | PS | PB | PS |
| 8 | PS | PM | PM | PM | PM |
| 9 | PB | PB | PB | PS | PB |
表1 结合DWA的模糊规则
Tab. 1 Fuzzy rules combined with DWA
| 序号 | 输入 | 输出 | |||
|---|---|---|---|---|---|
| dg | do | α | β | γ | |
| 1 | PS | PB | PB | PM | PS |
| 2 | PS | PM | PB | PM | PS |
| 3 | PS | PB | PB | PS | PS |
| 4 | PM | PB | PS | PB | PS |
| 5 | PM | PM | PM | PM | PS |
| 6 | PM | PB | PM | PS | PB |
| 7 | PS | PB | PS | PB | PS |
| 8 | PS | PM | PM | PM | PM |
| 9 | PB | PB | PB | PS | PB |
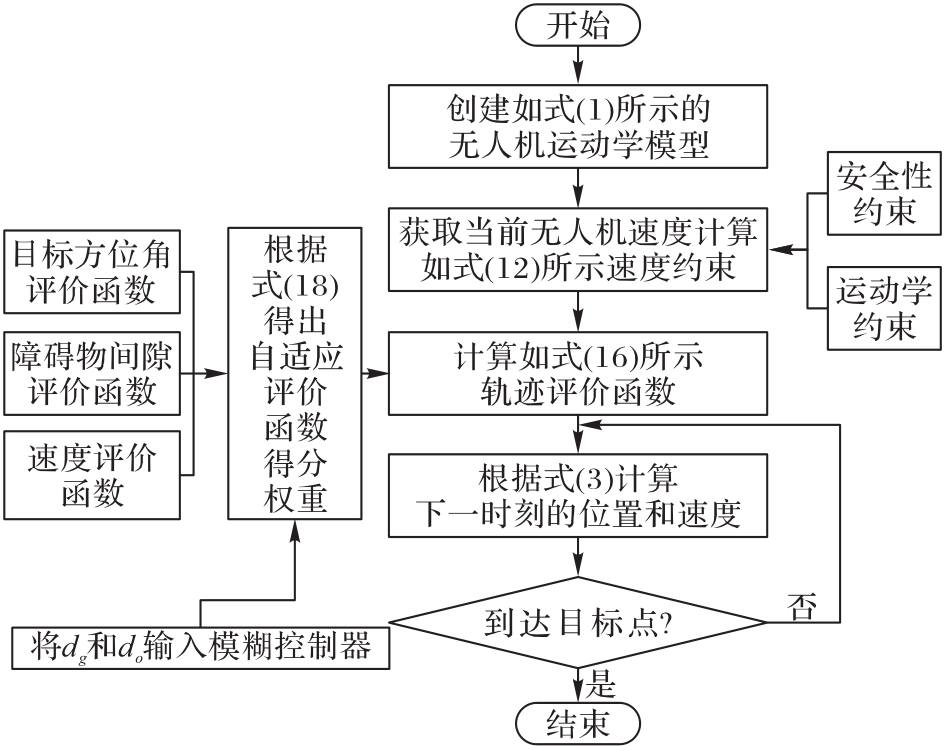
图9 自适应评价函数参数的DWA
Fig. 9 DWA based on adaptive evaluation function parameters
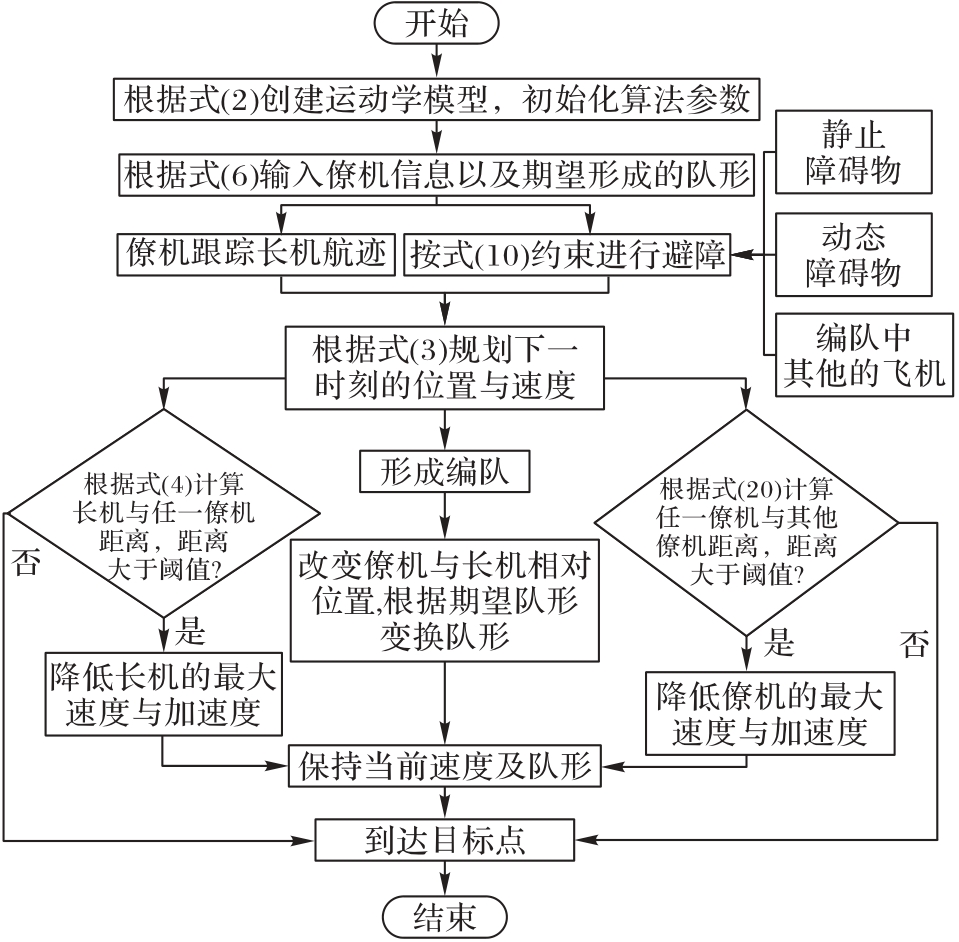
图10 多机编队避障和队形变换算法
Fig. 10 Obstacle avoidance and switching algorithm for multi-UAV formation
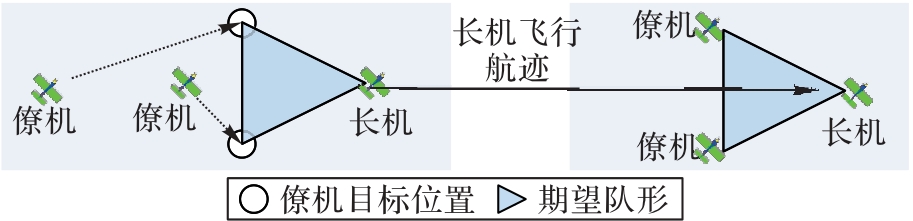
图11 编队变换的过程
Fig. 11 Process of formation switching
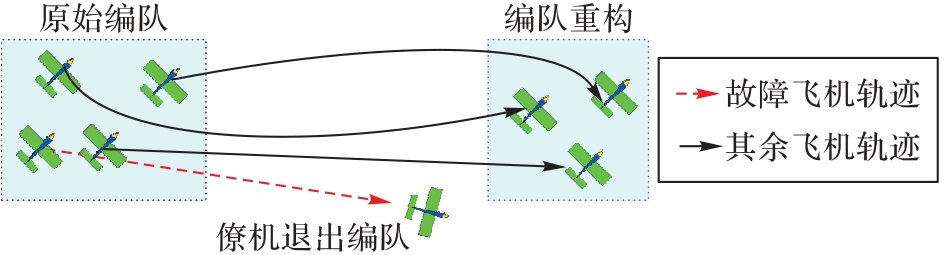
图12 无人机故障后编队队形重构过程
Fig. 12 Formation reconfiguration process after UAV fault occurrence
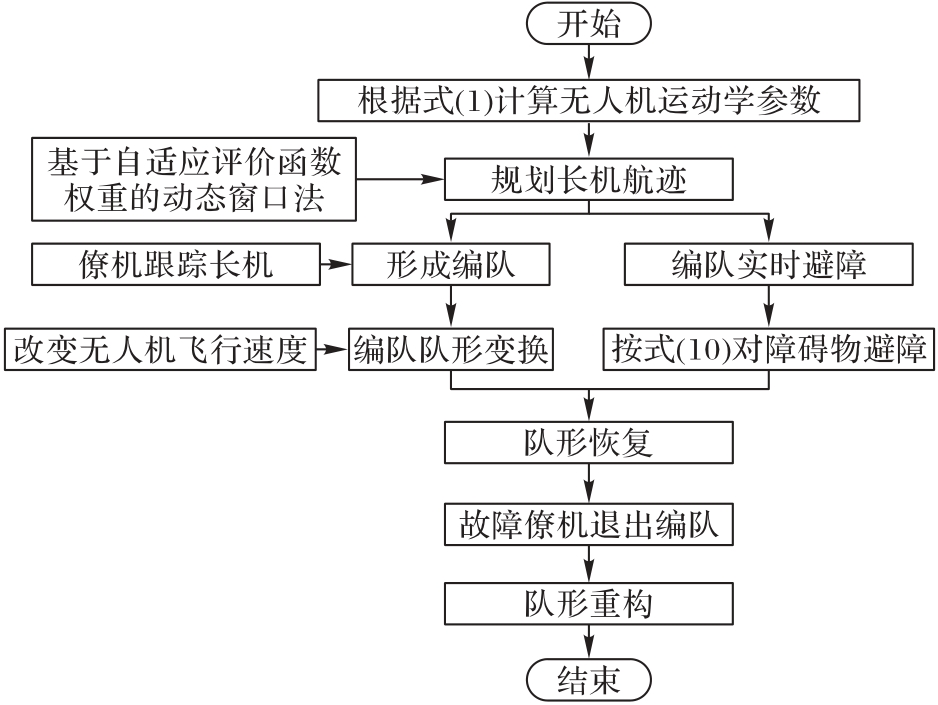
图13 多机编队避障和重构算法
Fig. 13 Obstacle avoidance and formation reconfiguration algorithm of multi-UAV formation
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 20 m/s | 0.05 | ||
| 0.4 m/s2 | 0.2 | ||
| 20 deg/s | 0.1 | ||
| 0.4 deg/s2 |
表2 初始参数设置
Tab. 2 Initial parameter setting
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 20 m/s | 0.05 | ||
| 0.4 m/s2 | 0.2 | ||
| 20 deg/s | 0.1 | ||
| 0.4 deg/s2 |
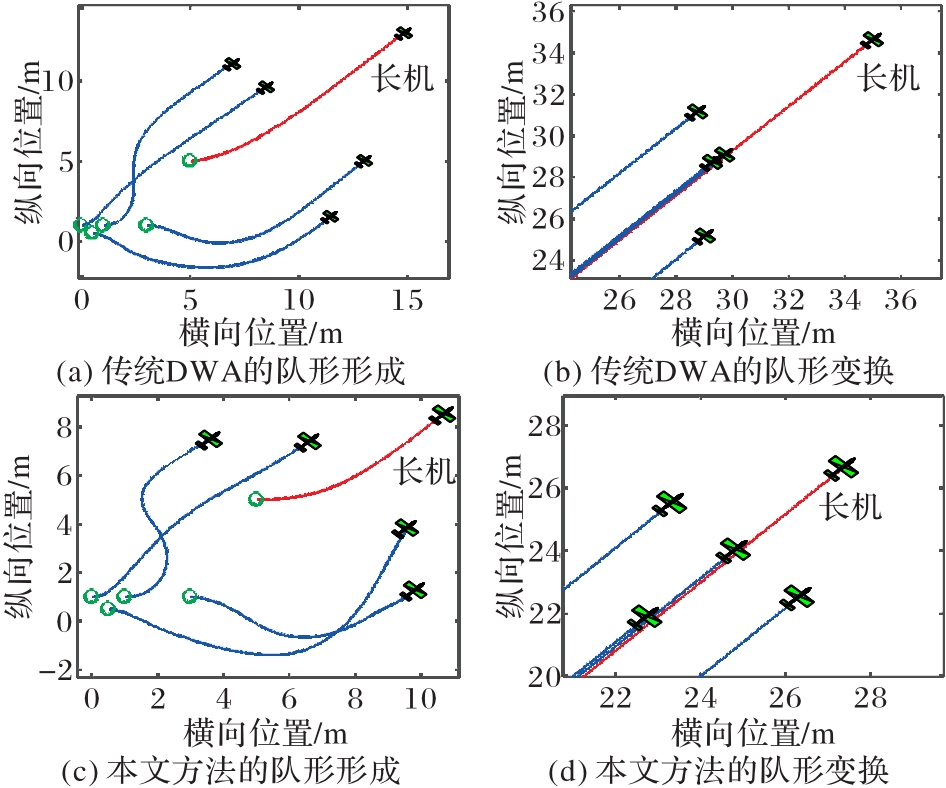
图14 多机编队形成与队形变换仿真结果
Fig. 14 Simulation results of multi-UAV formation and switching
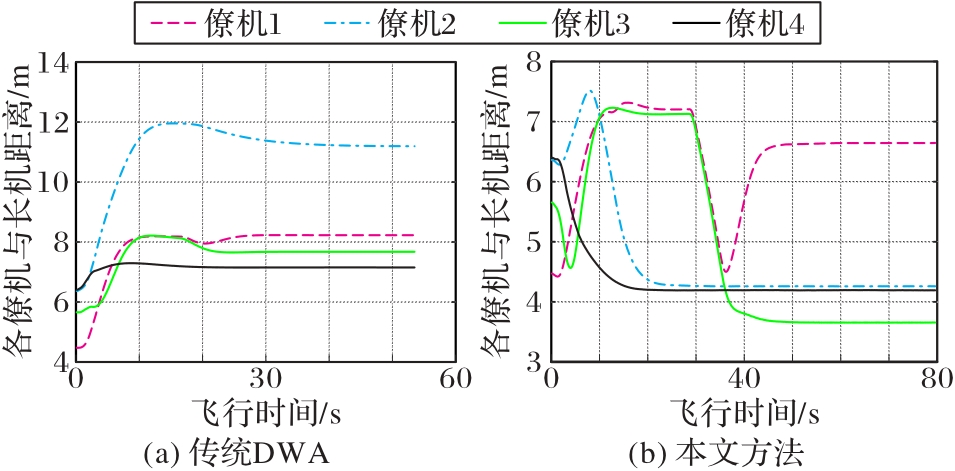
图15 不同方法的各僚机与长机距离
Fig. 15 Distance between each follower and leader of different methods
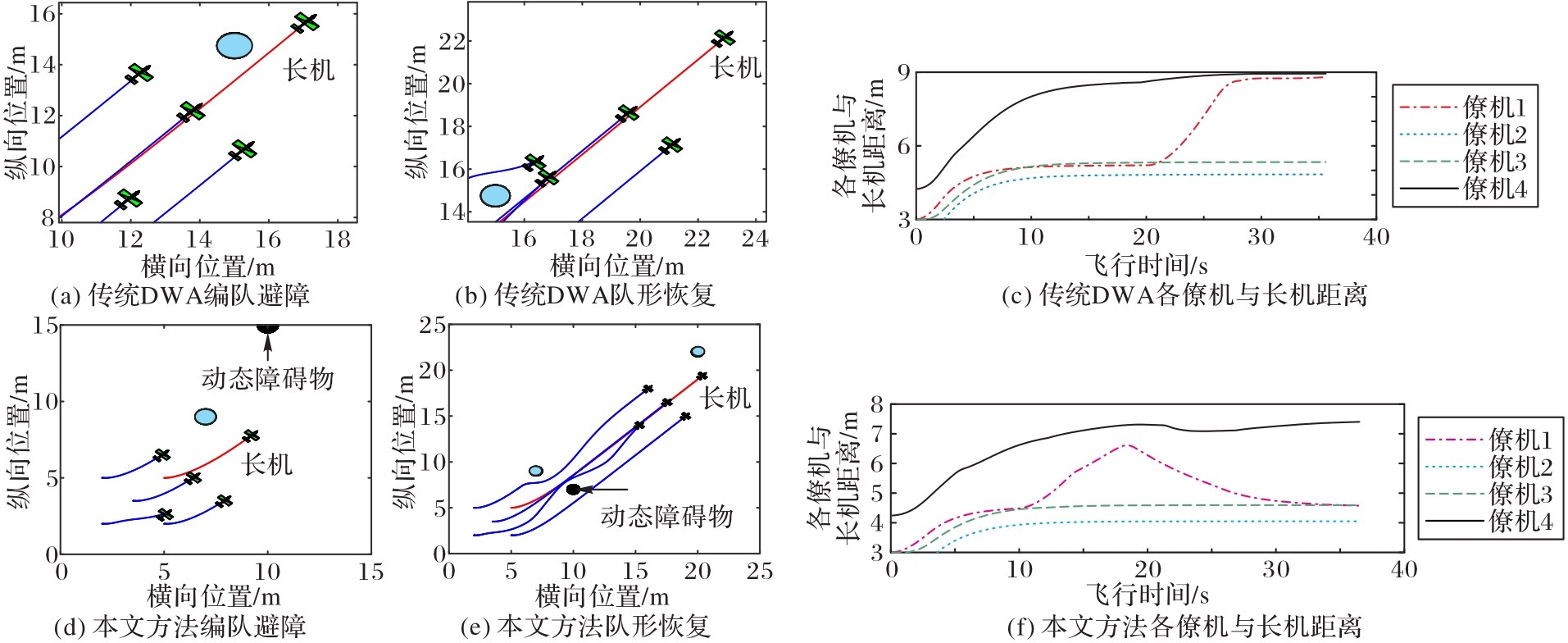
图16 不同方法的编队避障与队形恢复仿真结果
Fig. 16 Simulation results of different methods for formation obstacle avoidance and recovery
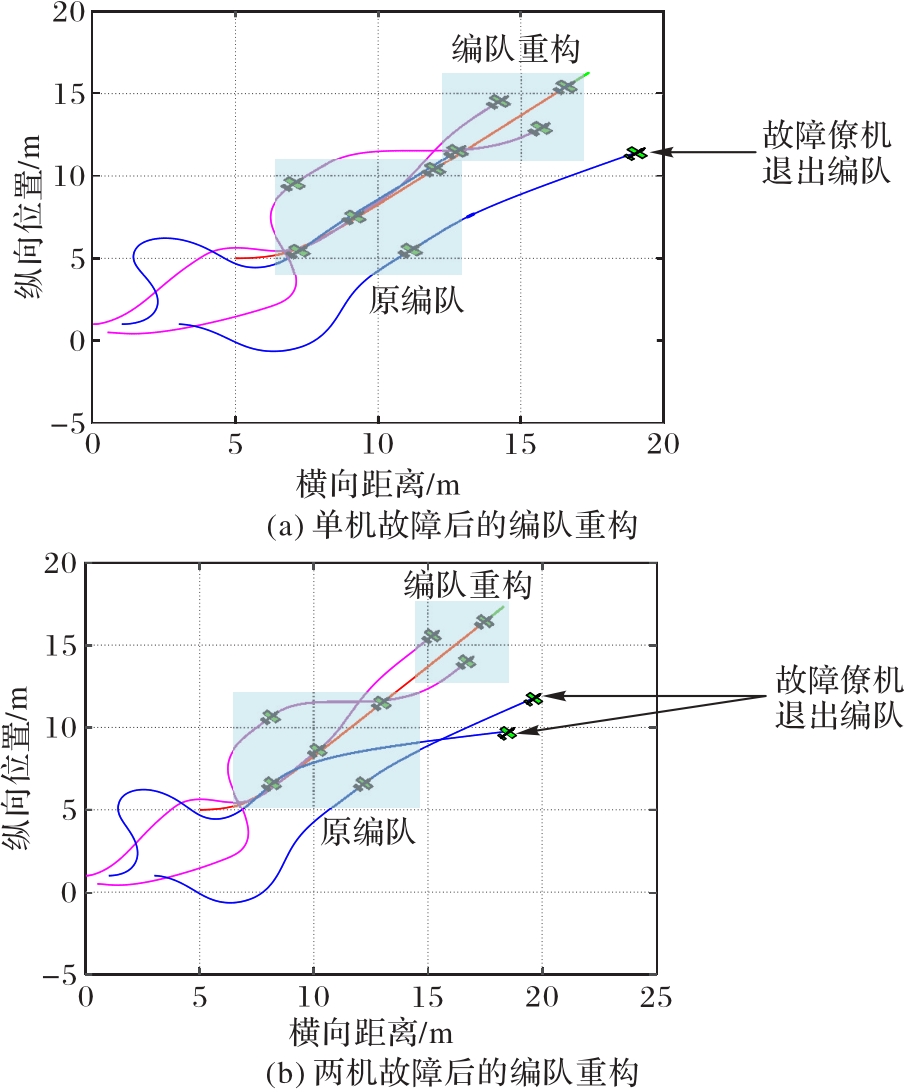
图17 单机故障和两机故障后的编队重构
Fig. 17 Formation reconfiguration in case of single UAV fault and two UAVs fault
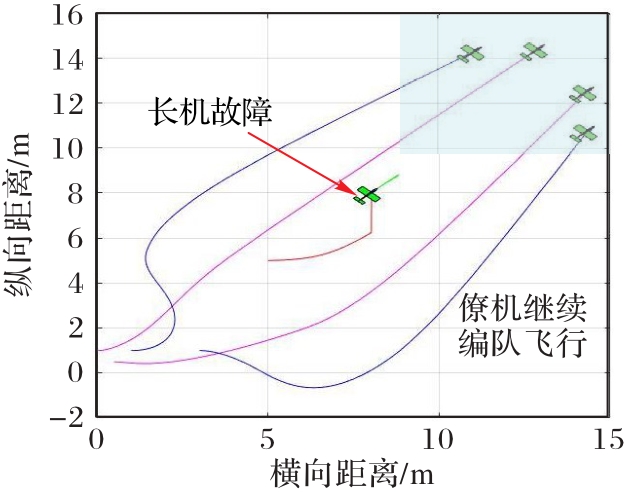
图18 长机故障后的编队重构
Fig. 18 Formation reconfiguration in case of fault occurrence in leader-UAV
| 1 | 宗群,王丹丹,邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展 [J]. 哈尔滨工业大学学报, 2017, 49(3):1-14. |
| ZONG Q, WANG D D, SHAO S K, et al. Research status and development of multi-UAV coordinated formation flight control [J]. Journal of Harbin Institute of Technology, 2017, 49(3): 1-14. | |
| 2 | WANG H-M, ZHANG X, JIANG J-C. UAV-involved wireless physical-layer secure communications: overview and research directions [J]. IEEE Wireless Communications, 2019, 26(5): 32-39. |
| 3 | 张安,杨咪,毕文豪,等.基于多策略GWO算法的不确定环境下异构多无人机任务分配[J].航空学报,2023,44(8): 327115. |
| ZHANG A, YANG M, BI W H, et al. Task allocation of heterogeneous multi-UAVs in uncertain environment based on multiple strategies GWO [J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(8): 327115. | |
| 4 | YAO W, QI N, WAN N, et al. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles [J]. Aerospace Science and Technology, 2019, 86: 455-464. |
| 5 | 吴立尧, 苏析超, 王垒, 等. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023,45(7):2192-2202. |
| WU L Y, SU X C, WANG L, et al. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. | |
| 6 | 许洋, 秦小林, 刘佳, 等. 多无人机自适应编队协同航迹规划[J]. 计算机应用, 2020, 40(5): 1515-1521. |
| XU Y, QIN X L, LIU J, et al. Multi-unmanned aerial vehicle adaptive formation cooperative trajectory planning [J]. Journal of Computer Applications, 2020, 40(5): 1515-1521. | |
| 7 | LIU D, BAO W, ZHU X, et al. Cooperative path optimization for multiple UAVs surveillance in uncertain environment [J]. IEEE Internet of Things, 2022, 9(13): 10676-10692. |
| 8 | 苟进展,吴宇,邓嘉宁.基于群智能一致性理论的无人机编队全过程飞行航迹规划方法研究[J]. 控制与决策, 2023,38(5):1464-1472. |
| GOU J Z, WU Y, DENG J N. Swarm intelligence and consensus theory-based trajectory planning for a complete flight of UAV formation [J]. Control and Decision, 2023, 38(5):1464-1472. | |
| 9 | 周映江,蒋国平,周帆,等. 基于滑模方法的分布式多无人机编队控制[J].信息与控制,2018,47(3):306-313. |
| ZHOU Y J, JIANG G P, ZHOU F, et al. Distributed Multi-UAV formation control based on sliding mode method [J]. Information and Control, 2018, 47(3): 306-313. | |
| 10 | 徐星光, 王晓峰, 姚璐, 等. 固定翼无人机编队构型与通信拓扑优化[J]. 系统工程与电子技术, 2022, 44(9): 2936-2946. |
| XU X G, WANG X F, YAO L, et al. Formation configuration and communication topology optimization for fixed-wing UAVs [J]. Systems Engineering and Electronics, 2022, 44(9): 2936-2946. | |
| 11 | 赵军民,何浩哲,王少奇,等.复杂环境下多无人机目标跟踪与避障联合航迹规划 [J].兵工学报,2023,44(9):2685-2696. |
| ZHAO J M, HE H Z, WANG S Q, et al. Joint path planning for multiple UAVs target tracking and obstacle avoidance in complicated environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. | |
| 12 | DUAN H, LUO Q, SHI Y, et al. Hybrid particle swarm optimization and genetic algorithm for multi-UAV formation reconfiguration [J]. IEEE Computational Intelligence Magazine, 2013, 8(3): 16-27. |
| 13 | ZHANG J, YAN J, ZHANG P. Multi-UAV formation control based on a novel back-stepping approach [J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 2437-2448. |
| 14 | 费思远, 鲜斌, 王岭. 基于群集行为的分布式多无人机编队动态避障控制[J]. 控制理论与应用, 2022, 39(1) :1-11. |
| FEI S Y, XIAN B, WANG L. Distributed formation control for multiple unmanned aerial vehicles with dynamic obstacle avoidance based on the flocking behavior [J]. Control Theory & Applications, 2022, 39(1): 1-11. | |
| 15 | CHAMSEDDINE A, ZHANG Y, RABBATH C A. Trajectory planning and re-planning for fault tolerant formation flight control of quadrotor unmanned aerial vehicles [C]// Proceedings of the 2012 American Control Conference. Piscataway: IEEE, 2012: 3291-3296. |
| 16 | WANG Y, SHAN M, WANG D. Motion capability analysis for multiple fixed-wing UAV formations with speed and heading rate constraints [J]. IEEE Transactions on Control of Network Systems, 2019, 7(2): 977-989. |
| 17 | XU Y, ZHENG W, LUO D, et al. Dynamic affine formation control of networked under-actuated quad-rotor UAVs with three-dimensional patterns [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1269-1285. |
| 18 | PAN Z, ZHANG C, XIA Y, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems [J]. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2021, 69(3): 1129-1133. |
| 19 | BIAN L, SUN W, SUN T. Trajectory following and improved differential evolution solution for rapid forming of UAV formation[J]. IEEE Access, 2019, 7: 169599-169613. |
| 20 | 卢燕梅, 宗群, 张秀云, 等. 集群无人机队形重构及虚拟仿真验证[J]. 航空学报, 2020, 41(4): 323580. |
| LU Y M, ZONG Q, ZHANG X Y, et al. Formation reconstruction and virtual simulation verification of swarm UAVs [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(4): 323580. | |
| 21 | GUO J, QI J, WANG M, et al. Distributed cooperative obstacle avoidance and formation reconfiguration for multiple quadrotors: theory and experiment [J]. Aerospace Science and Technology, 2023, 136: 108218. |
| 22 | GONG J, JIANG B, MA Y, et al. Distributed adaptive fault-tolerant formation-containment control with prescribed performance for heterogeneous multi agent systems [J]. IEEE Transactions on Cybernetics, 2023, 53(12): 7787-7799. |
| 23 | 任立敏, 王伟东, 杜志江, 等. 障碍环境下多移动机器人动态优化队形变换 [J]. 机器人, 2013, 35(5): 535-543. |
| REN L M, WANG W D, DU Z J, et al. Dynamic and optimized formation switching for multiple mobile robots in obstacle environments [J]. Robot, 2013, 35(5): 535-543. | |
| 24 | 常路, 单梁, 戴跃伟, 等. 未知环境下基于改进DWA的多机器人编队控制[J]. 控制与决策, 2022, 37(10): 2524-2534. |
| CHANG L, SHAN L, DAI Y W, et al. Multi-robot formation control in unknown environment based on improved DWA [J]. Control and Decision, 2022, 37(10): 2524-2534. | |
| 25 | XIANG L, LI X, LIU H, et al. Parameter fuzzy self-adaptive dynamic window approach for local path planning of wheeled robot [J]. IEEE Open Journal of Intelligent Transportation Systems, 2022, 3: 1-6. |
| 26 | J-H MOON, LEE B-Y, M-J TAHK. A hybrid dynamic window approach for collision avoidance of VTOL UAVs [J]. International Journal of Aeronautical and Space Sciences, 2018, 19: 889-903. |
| [1] | 何浩东, 符浩, 王强, 周帅, 刘伟. 基于深度强化学习的多机器人路径跟随与编队[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2626-2633. |
| [2] | 郑志强, 段海滨. 基于有限忍耐度鸽群优化的无人机近距空战机动决策[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1401-1407. |
| [3] | 黄天宇, 李远兴, 陈昊, 郭紫佳, 魏明军. 地空协同场景下加权模糊聚类用户簇划分方法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1555-1561. |
| [4] | 唐睿, 岳士博, 张睿智, 刘川, 庞川林. UAV协助下非正交多址接入使能的数据采集系统中能效优化机制[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1209-1218. |
| [5] | 周景贤, 李希娜. 基于改进卷积神经网络和射频指纹的无人机检测与识别[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 876-882. |
| [6] | 蔡美玉, 朱润哲, 吴飞, 张开昱, 李家乐. 基于注意力机制和多粒度特征融合的跨视角匹配模型[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 901-908. |
| [7] | 高胡震, 杜昌平, 郑耀. 基于扩张状态观测器的无人机云台系统控制算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 604-610. |
| [8] | 王林, 刘景亮, 王无为. 基于空洞卷积融合Transformer的无人机图像小目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3595-3602. |
| [9] | 孙鉴, 马宝全, 吴隹伟, 杨晓焕, 武涛, 陈攀. 地震场景下无人机群路径规划与任务分配均衡联合优化[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3232-3239. |
| [10] | 王昱, 任田君, 范子琳. 基于引导Minimax-DDQN的无人机空战机动决策[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2636-2643. |
| [11] | 张钟元, 戴炜, 李光昱, 陈小庆, 邓启波. 基于改进人工势场和一致性协议的协同避障算法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2644-2650. |
| [12] | 李校林, 江雨桑. 无人机辅助移动边缘计算中的任务卸载算法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1893-1899. |
| [13] | 祁超帅, 何文思, 焦毅, 马英红, 蔡伟, 任素萍. 无人机飞行数据异常检测算法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1833-1841. |
| [14] | 孙亚男, 吴杰宏, 石峻岭, 高利军. 改进自组织映射的多无人机协同任务分配方法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1551-1556. |
| [15] | 王先兰, 周金坤, 穆楠, 王晨. 基于多任务联合学习的跨视角地理定位方法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1625-1635. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||