


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (5): 1401-1407.DOI: 10.11772/j.issn.1001-9081.2023121837
所属专题: 进化计算专题(2024年第5期“进化计算专题”导读,全文已上线)
郑志强, 段海滨( )
)
收稿日期:2024-01-02
接受日期:2024-01-22
发布日期:2024-04-26
出版日期:2024-05-10
通讯作者:
段海滨
作者简介:郑志强(1998—),男,江西九江人,博士研究生,主要研究方向:无人机自主控制、群体智能基金资助:Received:2024-01-02
Accepted:2024-01-22
Online:2024-04-26
Published:2024-05-10
Contact:
Haibin DUAN
About author:ZHENG Zhiqiang, born in 1998, Ph. D. candidate. His research interests include UAV autonomous control, swarm intelligence.
Supported by:摘要:
由于对抗双方态势的快速变化,无人机近距空战机动自主决策困难且复杂,是空中对抗的一个难点。对此,提出一种基于有限忍耐度鸽群优化(FTPIO)算法的无人机近距空战机动决策方法。该方法主要包括基于机动动作库的对手行动预测和基于FTPIO算法的机动控制量和执行时间优化求解两个部分。为提升基本鸽群优化(PIO)算法的全局探索能力,引入有限忍耐度策略,在鸽子个体几次迭代中没有找到更优解时对其属性进行一次重置,避免陷入局部最优陷阱。该方法采用的优化变量是无人机运动模型控制变量的增量,打破了机动库的限制。通过和极小极大方法、基本PIO算法和粒子群优化(PSO)算法的仿真对抗测试结果表明,所提出的机动决策方法能够在近距空战中有效击败对手,产生更为灵活的欺骗性机动行为。
中图分类号:
郑志强, 段海滨. 基于有限忍耐度鸽群优化的无人机近距空战机动决策[J]. 计算机应用, 2024, 44(5): 1401-1407.
Zhiqiang ZHENG, Haibin DUAN. Short-range UAV air combat maneuver decision-making via finite tolerance pigeon-inspired optimization[J]. Journal of Computer Applications, 2024, 44(5): 1401-1407.
| 编号 | 名称 | 控制量 |
|---|---|---|
| 1 | 匀速直飞 | |
| 2 | 加速直飞 | |
| 3 | 减速直飞 | |
| 4 | 匀速爬升 | |
| 5 | 加速爬升 | |
| 6 | 减速爬升 | |
| 7 | 匀速降高 | |
| 8 | 加速降高 | |
| 9 | 减速降高 | |
| 10 | 匀速左转 | |
| 11 | 加速左转 | |
| 12 | 减速左转 | |
| 13 | 匀速右转 | |
| 14 | 加速右转 | |
| 15 | 减速右转 |
表1 机动动作库
Tab. 1 Maneuver library
| 编号 | 名称 | 控制量 |
|---|---|---|
| 1 | 匀速直飞 | |
| 2 | 加速直飞 | |
| 3 | 减速直飞 | |
| 4 | 匀速爬升 | |
| 5 | 加速爬升 | |
| 6 | 减速爬升 | |
| 7 | 匀速降高 | |
| 8 | 加速降高 | |
| 9 | 减速降高 | |
| 10 | 匀速左转 | |
| 11 | 加速左转 | |
| 12 | 减速左转 | |
| 13 | 匀速右转 | |
| 14 | 加速右转 | |
| 15 | 减速右转 |
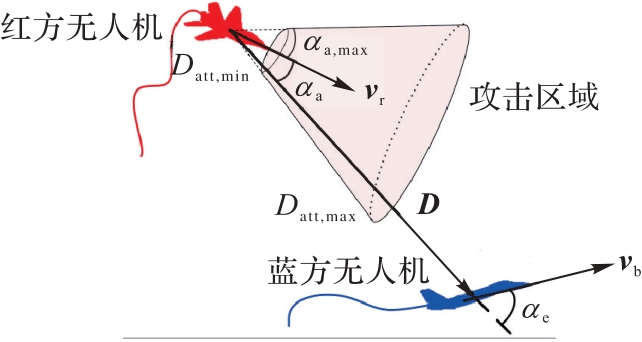
图1 红蓝双方态势关系
Fig. 1 Situational relationship of red and blue

图2 近距空战流程
Fig. 2 Flow chart of short-range air combat

图3 FTPIO算法流程
Fig. 3 Flow chart of FTPIO algorithm
| 算法 | 参数符号 | 描述 | 参数值 |
|---|---|---|---|
PIO和 FTPIO | 地图与指南针算子最大迭代次数 | 40 | |
| 地标算子最大迭代次数 | 8 | ||
| 种群大小 | 20 | ||
| 地图与指南针因子 | 0.2 | ||
| PSO | 学习因子 | 2.0 | |
| 最大迭代次数 | 48 | ||
| 种群大小 | 20 | ||
| 惯性因子 | 0.8 |
表2 算法参数设置
Tab. 2 Parameters for algorithms
| 算法 | 参数符号 | 描述 | 参数值 |
|---|---|---|---|
PIO和 FTPIO | 地图与指南针算子最大迭代次数 | 40 | |
| 地标算子最大迭代次数 | 8 | ||
| 种群大小 | 20 | ||
| 地图与指南针因子 | 0.2 | ||
| PSO | 学习因子 | 2.0 | |
| 最大迭代次数 | 48 | ||
| 种群大小 | 20 | ||
| 惯性因子 | 0.8 |
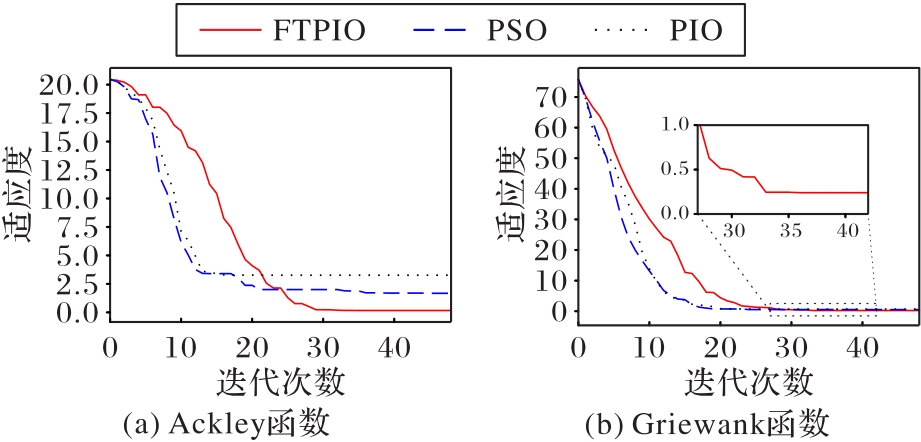
图4 测试函数迭代曲线
Fig. 4 Iteration curves of test functions
| 情形 | 阵营 | 状态值 |
|---|---|---|
| 一般 | 红方 | s =[100 m,2 600 m,1 000 m,60 ms,0,20°]T |
| 蓝方 | s =[4 200 m,3 000 m,1 900 m,60 ms,0,190°]T | |
| 平衡 | 红方 | s =[700 m,2 500m,1 200 m,60 ms,0,0]T |
| 蓝方 | s =[4 700 m,2 500m,1 200 m,60 ms,0,180°]T | |
| 优势 | 红方 | s =[700 m,2 600 m,1 100 m,60 ms,0,25°]T |
| 蓝方 | s =[1 200 m,3 000 m,1 500 m,60 ms,0,0]T | |
| 劣势 | 红方 | s =[1 200 m,2 600 m,1 100 m,60 ms,0,25°]T |
| 蓝方 | s =[700 m,3 000 m,1 500m,60 ms,0,0]T |
表3 测试情形中红蓝双方初始状态
Tab. 3 Initial states of UAVs in tests
| 情形 | 阵营 | 状态值 |
|---|---|---|
| 一般 | 红方 | s =[100 m,2 600 m,1 000 m,60 ms,0,20°]T |
| 蓝方 | s =[4 200 m,3 000 m,1 900 m,60 ms,0,190°]T | |
| 平衡 | 红方 | s =[700 m,2 500m,1 200 m,60 ms,0,0]T |
| 蓝方 | s =[4 700 m,2 500m,1 200 m,60 ms,0,180°]T | |
| 优势 | 红方 | s =[700 m,2 600 m,1 100 m,60 ms,0,25°]T |
| 蓝方 | s =[1 200 m,3 000 m,1 500 m,60 ms,0,0]T | |
| 劣势 | 红方 | s =[1 200 m,2 600 m,1 100 m,60 ms,0,25°]T |
| 蓝方 | s =[700 m,3 000 m,1 500m,60 ms,0,0]T |

图5 四种情形下无人机近距空战仿真三维轨迹
Fig. 5 3D trajectories of short-range air combat simulations in four cases
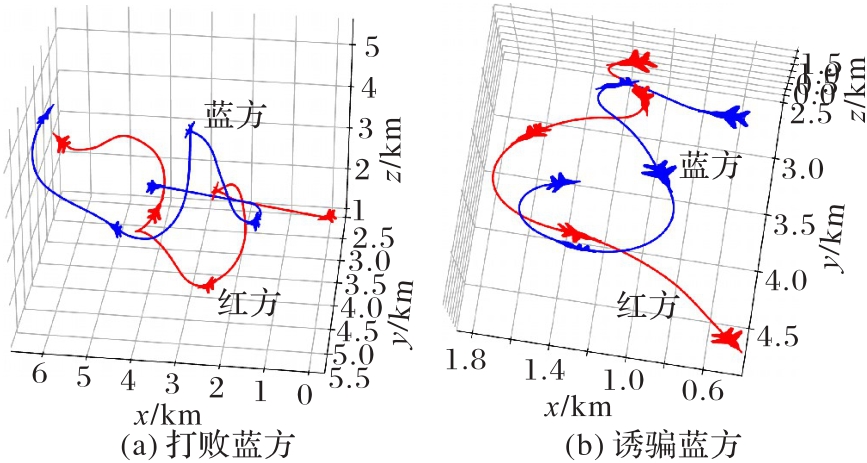
图6 FTPIO(红方)与基本PIO(蓝方)
Fig. 6 FTPIO (red) vs. Basic PIO (blue)

图7 FTPIO(红方)与PSO(蓝方)
Fig. 7 FTPIO (red) vs. PSO (blue)
| 1 | HUO M, DUAN H, LUO D, et al. Parameter estimation for a VTOL UAV using mutant pigeon inspired optimization algorithm with dynamic OBL strategy[C]// Proceedings of the 2019 IEEE 15th International Conference on Control and Automation. Piscataway: IEEE, 2019: 669-674. 10.1109/icca.2019.8899524 |
| 2 | LUO L B, WANG X Y, MA J F, et al. GrpAvoid: multigroup collision-avoidance control and optimization for UAV swarm[J]. IEEE Transactions on Cybernetics, 2023, 53(3): 1776-1789. 10.1109/tcyb.2021.3132044 |
| 3 | YONG K N, CHEN M, WU Q X. Noncertainty-equivalent observer-based noncooperative target tracking control for unmanned aerial vehicles[J]. SCIENCE CHINA Information Sciences, 2022, 65(5): 152202. 10.1007/s11432-020-3205-4 |
| 4 | YANG Q M, ZHANG J D, SHI G Q, et al. Maneuver decision of UAV in short-range air combat based on deep reinforcement learning[J]. IEEE Access, 2020, 8: 363-378. 10.1109/access.2019.2961426 |
| 5 | KIM C-S, JI C-H, KIM B S. Development of a control law to improve the handling qualities for short-range air-to-air combat maneuvers [J]. Advances in Mechanical Engineering, 2020, 12(7): 1-15. 10.1177/1687814020936790 |
| 6 | 董一群,艾剑良.自主空战技术中的机动决策:进展与展望[J].航空学报, 2020, 41(S2): 724264. 10.7527/S1000-6893.2020.24264 |
| DONG Y Q, AI J L. Decision making in autonomous air combat: review and prospects[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724264. 10.7527/S1000-6893.2020.24264 | |
| 7 | ISAACS R. Differential Games: A Mathematical Theory with Applications to Warfare and Pursuit, Control and Optimization [M]. Mineola: Dover Publications, 1999: 305-330. |
| 8 | BASPINAR B, KOYUNCU E. Differential flatness-based optimal air combat maneuver strategy generation[C/OL]// Proceedings of the AIAA Scitech 2019 Forum. San Diego: American Institute of Aeronautics and Astronautics, 2019 [2023-12-05]. . 10.2514/6.2019-1985 |
| 9 | ERNEST N, CARROLL D, SCHUMACHER C, et al. Genetic fuzzy based artificial intelligence for unmanned combat aerial vehicle control in simulated air combat missions[J]. Journal of Defense Management, 2016, 6: 1000144. 10.4172/2167-0374.1000144 |
| 10 | WU A, YANG R, LIANG X, et al. Visual range maneuver decision of unmanned combat aerial vehicle based on fuzzy reasoning[J]. International Journal of Fuzzy Systems, 2022, 24(1): 519-536. 10.1007/s40815-021-01158-y |
| 11 | 王昱,任田君,范子琳.基于引导Minimax-DDQN的无人机空战机动决策[J].计算机应用,2023,43(8):2636-2643. 10.11772/j.issn.1001-9081.2022071069 |
| WANG Y, REN T J, FAN Z L. Air combat maneuver decision-making of unmanned aerial vehicle based on guided Minimax-DDQN[J]. Journal of Computer Applications, 2023, 43(8): 2636-2643. 10.11772/j.issn.1001-9081.2022071069 | |
| 12 | CHEN Y, ZHANG J, YANG Q, et al. Design and verification of UAV maneuver decision simulation system based on deep q‑learning network[C]// Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision. Piscataway: IEEE, 2020: 817-823. 10.1109/icarcv50220.2020.9305467 |
| 13 | RUAN W, DUAN H, DENG Y. Autonomous maneuver decisions via transfer learning pigeon-inspired optimization for UAVs in dogfight engagements[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(9): 1639-1657. 10.1109/jas.2022.105803 |
| 14 | RAMÍREZ LÓPEZ N, ŻBIKOWSKI R. Effectiveness of autonomous decision making for unmanned combat aerial vehicles in dogfight engagements[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(4): 1021-1024. 10.2514/1.g002937 |
| 15 | 高岳林,杨钦文,王晓峰,等.新型群体智能优化算法综述[J].郑州大学学报(工学版), 2022, 43(3): 21-30. |
| GAO Y L, YANG Q W, WANG X F, et al. Overview of new swarm intelligent optimization algorithms[J]. Journal of Zhengzhou University (Engineering Science), 2022, 43(3): 21-30. | |
| 16 | KENNEDY J, EBERHART R. Particle swarm optimization[C]// Proceedings of ICNN’95 — International Conference on Neural Networks. Piscataway: IEEE, 1995: 1942-1948. 10.1109/ICNN.1995.488968 |
| 17 | 王峰,黄子路,韩孟臣,等.基于KnCMPSO算法的异构无人机协同多任务分配[J].自动化学报,2023,49(2):399-414. |
| WANG F, HUANG Z L, HAN M C, et al. A knee point based coevolution multi-objective particle swarm optimization algorithm for heterogeneous UAV cooperative multi-task allocation[J]. Acta Automatica Sinica, 2023, 49(2): 399-414. | |
| 18 | 梁军,洪泽泓,余松森.基于改进粒子群优化算法和遗传变异的图像分割模型[J].计算机应用,2023,43(6):1743-1749. |
| LIANG J, HONG Z H, YU S S. Image segmentation model based on improved particle swarm optimization algorithm and genetic mutation[J]. Journal of Computer Application, 2023, 43(6): 1743-1749. | |
| 19 | DUAN H, QIAO P. Pigeon-inspired optimization: a new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. 10.1108/ijicc-02-2014-0005 |
| 20 | LIAO T, CHEN B, ZHOU Q, et al. Improved pigeon-inspired optimization in an integrated obstacle avoidance method for Mars UAV formation[J]. Guidance, Navigation and Control, 2023, 3(1): 2350006. 10.1142/s2737480723500061 |
| 21 | DUAN H, LEI Y, XIA J, et al. Autonomous maneuver decision for unmanned aerial vehicle via improved pigeon-inspired optimization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 3156-3170. 10.1109/taes.2022.3221691 |
| 22 | LI Y, HAN W, WANG Y. Deep reinforcement learning with application to air confrontation intelligent decision-making of manned/unmanned aerial vehicle cooperative system[J]. IEEE Access, 2020, 8: 67887-67898. 10.1109/access.2020.2985576 |
| 23 | REN Z, ZHANG D, TANG S, et al. Cooperative maneuver decision making for multi-UAV air combat based on incomplete information dynamic game[J]. Defence Technology, 2022, 27(3): 308-317. 10.1016/j.dt.2022.10.008 |
| 24 | 杨爱武,李战武,李宝,等.基于动态变权重的空战态势评估 [J].兵工学报,2021,42(7):1553-1563. 10.3969/j.issn.1000-1093.2021.07.023 |
| YANG A W, LI Z W, LI B, et al. Air combat situation assessment based on dynamic variable weight[J]. Acta Armamentarii, 2021, 42(7): 1553-1563. 10.3969/j.issn.1000-1093.2021.07.023 | |
| 25 | FENG Q, HAI X, SUN B, et al. Resilience optimization for multi-UAV formation reconfiguration via enhanced pigeon-inspired optimization[J]. Chinese Journal of Aeronautics, 2022, 35(1): 110-123. 10.1016/j.cja.2020.10.029 |
| 26 | HU D, YANG R, ZHANG Y, et al. Aerial combat maneuvering policy learning based on confrontation demonstrations and dynamic quality replay[J]. Engineering Applications of Artificial Intelligence, 2022, 111: 104767. 10.1016/j.engappai.2022.104767 |
| 27 | YAO X, LIU Y, LIN G. Evolutionary programming made faster[J]. IEEE Transactions on Evolutionary Computation, 1999, 3(2): 82-102. 10.1109/4235.771163 |
| [1] | 穆凌霞, 周政君, 王斑, 张友民, 薛向宏, 宁凯凯. 多无人机编队避障和编队重构方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2938-2946. |
| [2] | 黄天宇, 李远兴, 陈昊, 郭紫佳, 魏明军. 地空协同场景下加权模糊聚类用户簇划分方法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1555-1561. |
| [3] | 唐睿, 岳士博, 张睿智, 刘川, 庞川林. UAV协助下非正交多址接入使能的数据采集系统中能效优化机制[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1209-1218. |
| [4] | 周景贤, 李希娜. 基于改进卷积神经网络和射频指纹的无人机检测与识别[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 876-882. |
| [5] | 蔡美玉, 朱润哲, 吴飞, 张开昱, 李家乐. 基于注意力机制和多粒度特征融合的跨视角匹配模型[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 901-908. |
| [6] | 高胡震, 杜昌平, 郑耀. 基于扩张状态观测器的无人机云台系统控制算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 604-610. |
| [7] | 王林, 刘景亮, 王无为. 基于空洞卷积融合Transformer的无人机图像小目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3595-3602. |
| [8] | 孙鉴, 马宝全, 吴隹伟, 杨晓焕, 武涛, 陈攀. 地震场景下无人机群路径规划与任务分配均衡联合优化[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3232-3239. |
| [9] | 张钟元, 戴炜, 李光昱, 陈小庆, 邓启波. 基于改进人工势场和一致性协议的协同避障算法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2644-2650. |
| [10] | 王昱, 任田君, 范子琳. 基于引导Minimax-DDQN的无人机空战机动决策[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2636-2643. |
| [11] | 李校林, 江雨桑. 无人机辅助移动边缘计算中的任务卸载算法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1893-1899. |
| [12] | 祁超帅, 何文思, 焦毅, 马英红, 蔡伟, 任素萍. 无人机飞行数据异常检测算法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1833-1841. |
| [13] | 孙亚男, 吴杰宏, 石峻岭, 高利军. 改进自组织映射的多无人机协同任务分配方法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1551-1556. |
| [14] | 王先兰, 周金坤, 穆楠, 王晨. 基于多任务联合学习的跨视角地理定位方法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1625-1635. |
| [15] | 王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||