


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (5): 1551-1556.DOI: 10.11772/j.issn.1001-9081.2022040592
所属专题: 先进计算
孙亚男, 吴杰宏( ), 石峻岭, 高利军
), 石峻岭, 高利军
收稿日期:2022-04-27
修回日期:2022-06-22
接受日期:2022-06-24
发布日期:2022-07-11
出版日期:2023-05-10
通讯作者:
吴杰宏
作者简介:孙亚男(1996—),女,辽宁朝阳人,硕士研究生,主要研究方向:无人机系统路径规划和任务分配基金资助:
Yanan SUN, Jiehong WU(), Junling SHI, Lijun GAO
Received:2022-04-27
Revised:2022-06-22
Accepted:2022-06-24
Online:2022-07-11
Published:2023-05-10
Contact:
Jiehong WU
About author:SUN Yanan, born in 1996, M. S. candidate. Her research interests include path planning and task assignment for Unmanned Aerial Vehicle (UAV) system.Supported by:摘要:
针对现有算法对多无人机(UAV)协同进行多任务分配时存在负载均衡和执行效率方面的不足,提出一种改进的自组织映射(ISOM)算法。该算法根据飞行时间和任务执行时间设计了UAV的负载均衡度,以提升任务完成的效率;还设计了新的非线性变化的学习率和邻域函数保证ISOM算法的稳定性和快速收敛。然后,在不同任务环境对ISOM算法进行了有效性验证。实验结果表明,与结合遗传算法的粒子群优化(GA-PSO)、Gurobi和ORTools算法相比,ISOM算法的任务完成时间可分别减少15.5%、12.7%和7.3%;在TSPLIB数据集的实例KroA100、KroA150、KroA200上进行航迹长度减小的有效性验证时,与杂草优化(IWO)算法、改进的单亲遗传算法(IPGA)和蚁群单亲遗传算法(AC-PGA)的对比结果表明,ISOM算法在无人机数量为2、3、4、5、8时,均获得了最小的航迹长度。由此可见,ISOM算法在解决多UAV协同多任务分配问题时效果显著。
中图分类号:
孙亚男, 吴杰宏, 石峻岭, 高利军. 改进自组织映射的多无人机协同任务分配方法[J]. 计算机应用, 2023, 43(5): 1551-1556.
Yanan SUN, Jiehong WU, Junling SHI, Lijun GAO. Multi-UAV collaborative task assignment method based on improved self-organizing map[J]. Journal of Computer Applications, 2023, 43(5): 1551-1556.
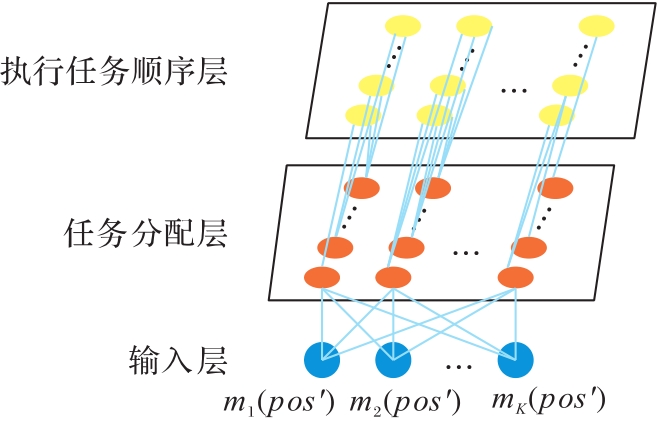
图1 ISOM神经网络结构
Fig. 1 Neural network structure of ISOM
| 编号 | 位置 | 编号 | 位置 |
|---|---|---|---|
| T1 | (1 425,915) | T2 | (1 137,747) |
| T3 | (865,422) | T4 | (885,111) |
| T5 | (381,447) | T6 | (147,675) |
| T7 | (867,963) | T8 | (327,207) |
| T9 | (1 011,555) | T10 | (1 685,147) |
表1 任务点的位置信息
Tab. 1 Location information of task points
| 编号 | 位置 | 编号 | 位置 |
|---|---|---|---|
| T1 | (1 425,915) | T2 | (1 137,747) |
| T3 | (865,422) | T4 | (885,111) |
| T5 | (381,447) | T6 | (147,675) |
| T7 | (867,963) | T8 | (327,207) |
| T9 | (1 011,555) | T10 | (1 685,147) |
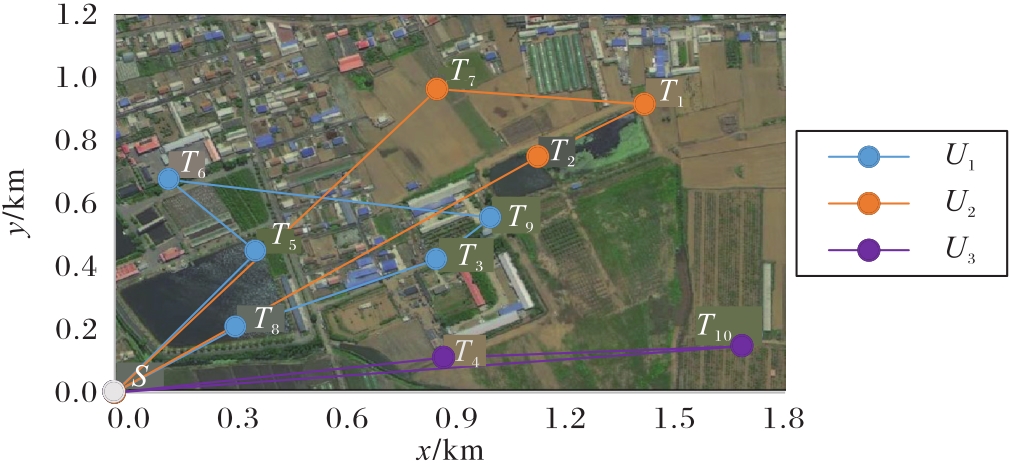
图2 ISOM算法的任务分配方案
Fig. 2 Task assignment scheme of ISOM algorithm
| UAV | 航迹长度/m | 执行数量 | 完成时间/s |
|---|---|---|---|
| U1 | 2 950.22 | 5 | 84.00 |
| U2 | 3 549.69 | 3 | 85.99 |
| U3 | 3 384.14 | 2 | 77.68 |
表2 ISOM算法的执行任务结果
Tab. 2 Execution results of ISOM algorithm
| UAV | 航迹长度/m | 执行数量 | 完成时间/s |
|---|---|---|---|
| U1 | 2 950.22 | 5 | 84.00 |
| U2 | 3 549.69 | 3 | 85.99 |
| U3 | 3 384.14 | 2 | 77.68 |
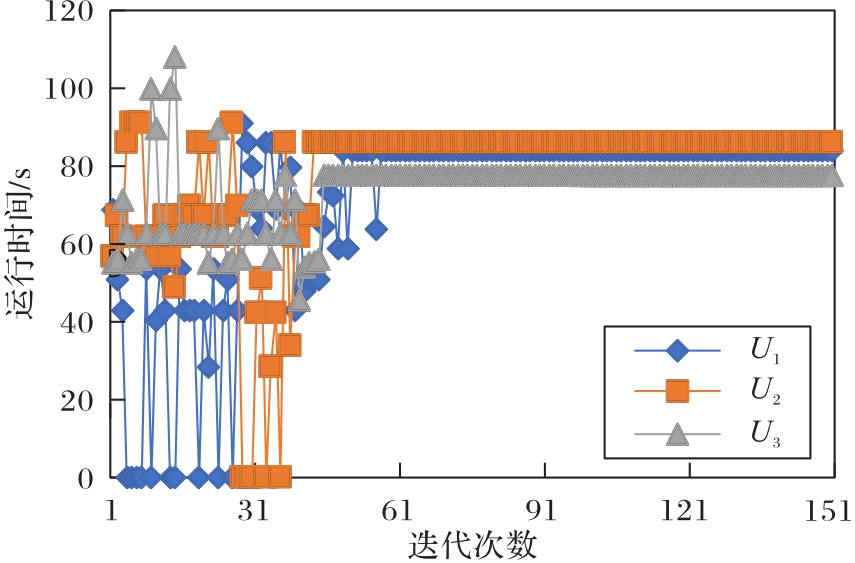
图3 ISOM算法的收敛分析
Fig. 3 Convergence analysis of ISOM algorithm

图4 对比算法的任务分配方案
Fig. 4 Task assignment schemes of comparison algorithms
| 算法 | UAV | 航迹长度/m | 执行数量 | 完成时间/s |
|---|---|---|---|---|
| GA-PSO | U1 | 2 513.41 | 3 | 65.26 |
| U2 | 3 838.94 | 5 | 101.77 | |
| U3 | 1 220.35 | 2 | 34.40 | |
| Gurobi | U1 | 3 195.02 | 4 | 83.90 |
| U2 | 3 675.28 | 5 | 98.50 | |
| U3 | 3 386.94 | 1 | 72.73 | |
| ORTools | U1 | 3 387.33 | 3 | 82.74 |
| U2 | 2 762.46 | 3 | 70.24 | |
| U3 | 3 640.56 | 4 | 92.81 |
表3 对比算法的任务执行数据
Tab. 3 Task execution data of comparison algorithms
| 算法 | UAV | 航迹长度/m | 执行数量 | 完成时间/s |
|---|---|---|---|---|
| GA-PSO | U1 | 2 513.41 | 3 | 65.26 |
| U2 | 3 838.94 | 5 | 101.77 | |
| U3 | 1 220.35 | 2 | 34.40 | |
| Gurobi | U1 | 3 195.02 | 4 | 83.90 |
| U2 | 3 675.28 | 5 | 98.50 | |
| U3 | 3 386.94 | 1 | 72.73 | |
| ORTools | U1 | 3 387.33 | 3 | 82.74 |
| U2 | 2 762.46 | 3 | 70.24 | |
| U3 | 3 640.56 | 4 | 92.81 |
| 参数 | 极差 | 时间 |
|---|---|---|
| ISOM | 8.31 | 85.99 |
| GA-PSO | 67.37 | 101.77 |
| Gurobi | 15.77 | 98.50 |
| ORTools | 22.57 | 92.81 |
表4 不同算法完成任务的时间 ( s)
Tab. 4 Task complementation time of different algorithms
| 参数 | 极差 | 时间 |
|---|---|---|
| ISOM | 8.31 | 85.99 |
| GA-PSO | 67.37 | 101.77 |
| Gurobi | 15.77 | 98.50 |
| ORTools | 22.57 | 92.81 |
| 实例 | 算法 | 无人机数量N | ||||
|---|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 8 | ||
| KroA100 | ISOM | 22 316 | 25 094 | 23 757 | 25 316 | 25 130 |
| IWO | 40 546 | 41 834 | 39 754 | 41 255 | 37 251 | |
| IPGA | 29 215 | 31 087 | 34 445 | 32 482 | 38 790 | |
| AC-PGA | 26 902 | 26 416 | 27 322 | 28 759 | 31 332 | |
| KroA150 | ISOM | 27 863 | 29 322 | 29 208 | 30 292 | 31 724 |
| IWO | 68 012 | 67 788 | 67 089 | 67 045 | 66 258 | |
| IPGA | 46 123 | 45 686 | 55 490 | 67 419 | 73 317 | |
| AC-PGA | 33 986 | 35 053 | 36 292 | 37 102 | 38 862 | |
| KroA200 | ISOM | 34 323 | 34 751 | 33 000 | 33 126 | 33 877 |
| IWO | 73 718 | 74 103 | 77 987 | 74 876 | 72 436 | |
| IPGA | 60 371 | 67 769 | 85 157 | 92 312 | 105 997 | |
| AC-PGA | 38 389 | 40 039 | 41 602 | 41 948 | 45 102 | |
表5 不同算法的任务分配方案的航迹长度 ( m)
Tab. 5 Track lengths of task assignment schemes of different algorithms
| 实例 | 算法 | 无人机数量N | ||||
|---|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 8 | ||
| KroA100 | ISOM | 22 316 | 25 094 | 23 757 | 25 316 | 25 130 |
| IWO | 40 546 | 41 834 | 39 754 | 41 255 | 37 251 | |
| IPGA | 29 215 | 31 087 | 34 445 | 32 482 | 38 790 | |
| AC-PGA | 26 902 | 26 416 | 27 322 | 28 759 | 31 332 | |
| KroA150 | ISOM | 27 863 | 29 322 | 29 208 | 30 292 | 31 724 |
| IWO | 68 012 | 67 788 | 67 089 | 67 045 | 66 258 | |
| IPGA | 46 123 | 45 686 | 55 490 | 67 419 | 73 317 | |
| AC-PGA | 33 986 | 35 053 | 36 292 | 37 102 | 38 862 | |
| KroA200 | ISOM | 34 323 | 34 751 | 33 000 | 33 126 | 33 877 |
| IWO | 73 718 | 74 103 | 77 987 | 74 876 | 72 436 | |
| IPGA | 60 371 | 67 769 | 85 157 | 92 312 | 105 997 | |
| AC-PGA | 38 389 | 40 039 | 41 602 | 41 948 | 45 102 | |
| 1 | WEI X L, HUANG X L, LU T, et al. An improved method based on deep reinforcement learning for target searching[C]// Proceedings of the 4th International Conference on Robotics and Automation Engineering. Piscataway: IEEE, 2019: 130-134. 10.1109/icrae48301.2019.9043821 |
| 2 | BIRCHER A, KAMEL M, ALEXIS K, et al. Receding horizon “next-best-view” planner for 3D exploration[C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 1462-1468. 10.1109/icra.2016.7487281 |
| 3 | HILDMANN H, KOVACS E. Review: using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for disaster response, civil security and public safety[J]. Drones, 2019, 3(3): No.59. 10.3390/drones3030059 |
| 4 | SAMPEDRO C, RODRIGUEZ-RAMOS A, BAVLE H, et al. A fully-autonomous aerial robot for search and rescue applications in indoor environments using learning-based techniques[J]. Journal of Intelligent and Robotic Systems, 2019, 95(2): 601-627. 10.1007/s10846-018-0898-1 |
| 5 | FARINHA A, ZUFFEREY R, ZHENG P, et al. Unmanned aerial sensor placement for cluttered environments[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 6623-6630. 10.1109/lra.2020.3015459 |
| 6 | XU J W, OTA K, DONG M X. Aerial edge computing: flying attitude-aware collaboration for multi-UAV[J]. IEEE Transactions on Mobile Computing, 2022(Early Access): 1-1. 10.1109/tmc.2022.3179399 |
| 7 | ZHEN Z Y, WEN L D, WANG B L, et al. Improved contract network protocol algorithm based cooperative target allocation of heterogeneous UAV swarm[J]. Aerospace Science and Technology, 2021, 119: No.107054. 10.1016/j.ast.2021.107054 |
| 8 | FAIGL J, VÁŇA P, DECKEROVÁ J. Fast heuristics for the 3-D multi-goal path planning based on the generalized traveling salesman problem with neighborhoods[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2439-2446. 10.1109/lra.2019.2900507 |
| 9 | SHI K X, ZHANG H W, ZHANG Z Z, et al. The algorithm of terminal logistics path planning based on TSP problem[C]// Proceedings of the 2020 International Conference on Artificial Intelligence and Computer Engineering. Piscataway: IEEE, 2020: 130-133. 10.1109/icaice51518.2020.00031 |
| 10 | GAVISH B, PIRKUL H. Efficient algorithms for solving multi constraint zero-one knapsack problems to optimality[J]. Mathematical Programming, 1985, 31(1): 78-105. 10.1007/bf02591863 |
| 11 | JIANG C, WAN Z P, PENG Z H. A new efficient hybrid algorithm for large scale multiple traveling salesman problems[J]. Expert Systems with Applications, 2020, 139: No.112867. 10.1016/j.eswa.2019.112867 |
| 12 | ZHOU H L, SONG M L, PEDRYCZ W. A comparative study of improved GA and PSO in solving multiple traveling salesmen problem[J]. Applied Soft Computing, 2018, 64: 564-580. 10.1016/j.asoc.2017.12.031 |
| 13 | 胡士娟,鲁海燕,向蕾,等. 求解MMTSP的模糊聚类单亲遗传算法[J].计算机科学, 2020, 47(6):219-224. 10.11896/jsjkx.190500137 |
| HU S J, LU H Y, XIANG L, et al. Fuzzy C-means clustering based partheno-genetic algorithm for solving MMTSP[J]. Computer Science, 2020, 47(6): 219-224. 10.11896/jsjkx.190500137 | |
| 14 | 张瑞鹏,冯彦翔,杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2022, 43(12):418-433. 10.7527/S1000-6893.2021.26011 |
| ZHNAG R P, FENG Y X, YANG Y K. Hybrid particle swarm algorithm for multi-UAV cooperative task allocation[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(12):418-433. 10.7527/S1000-6893.2021.26011 | |
| 15 | KOHONEN T. Self-Organization and Associative Memory, SSINF 8 [M]. 3rd ed. Berlin: Springer, 1988: 37. 10.1007/978-3-662-00784-6 |
| 16 | KOHONEN T, KASKI S, LAGUS K, et al. Self organization of a massive document collection[J]. IEEE Transactions on Neural Networks, 2000, 11(3): 574-585. 10.1109/72.846729 |
| 17 | ZHU D Q, ZHOU B, YANG S X. A novel algorithm of multi-AUVs task assignment and path planning based on biologically inspired neural network map[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(2):333-342. 10.1109/tiv.2020.3029369 |
| 18 | LI X, ZHU D Q. An adaptive som neural network method for distributed formation control of a group of AUVs[J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8260-8270. |
| 19 | SUN B, ZHU D Q, TIAN C, et al. Complete coverage autonomous underwater vehicles path planning based on glasius bio-inspired neural network algorithm for discrete and centralized programming[J]. IEEE Transactions on Cognitive and Developmental Systems, 2019, 11(1): 73-84. 10.1109/tcds.2018.2810235 |
| 20 | ZHU D Q, CAO X, SUN B, et al. Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system[J]. IEEE Transactions on Cognitive and Developmental Systems, 2018, 10(2): 304-313. 10.1109/tcds.2017.2727678 |
| 21 | ZHU A M, YANG S X. A neural network approach to dynamic task assignment of multirobots[J]. IEEE Transactions on Neural Networks, 2006, 17(5): 1278-1287. 10.1109/tnn.2006.875994 |
| 22 | YI X, ZHU A M, YANG S X, et al. A bio-inspired approach to task assignment of swarm robots in 3-D dynamic environments[J]. IEEE Transactions on Cybernetics, 2017, 47(4): 974-983. 10.1109/tcyb.2016.2535153 |
| 23 | YAN M, YUAN H M, XU J, et al. Task allocation and route planning of multiple UAVs in a marine environment based on an improved particle swarm optimization algorithm[J]. EURASIP Journal on Advances in Signal Processing, 2021, 2021: No.94. 10.1186/s13634-021-00804-9 |
| 24 | Optimization Gurobi, LLC. Gurobi optimizer reference manual[EB/OL]. [2022-04-06].. |
| 25 | Google. OR-Tools Python reference: algorithms[EB/OL]. [2022-04-06].. |
| 26 | REINELT G. TSPLIB - a traveling salesman problem library[J]. ORSA Journal on Computing, 1991, 3(4): 376-384. 10.1287/ijoc.3.4.376 |
| 27 | VENKATESH P, SINGH A. Two metaheuristic approaches for the multiple traveling salesperson problem[J]. Applied Soft Computing, 2015, 26: 74-89. 10.1016/j.asoc.2014.09.029 |
| [1] | 张明, 付乐, 王海峰. 面向边缘计算的并发数据流接转控制模型[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3876-3883. |
| [2] | 张佩瑶, 付晓东. 防恶意竞价的众包多任务分配激励机制[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 261-268. |
| [3] | 龙运波, 唐聃. 分布式存储中基于局部修复码的负载均衡方法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 767-775. |
| [4] | 杨力, 陈建廷, 向阳. 基于HBase的工业时序大数据分布式存储性能优化策略[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 759-766. |
| [5] | 邓辅秦, 黄焕钊, 谭朝恩, 付兰慧, 张建民, 林天麟. 结合遗传算法和滚动调度的多机器人任务分配算法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3833-3839. |
| [6] | 高旗, 吕娜, 缪竞成. 基于负载均衡的无线虚拟网络映射算法[J]. 《计算机应用》唯一官方网站, 2022, 42(10): 3148-3153. |
| [7] | 彭鹏, 倪志伟, 朱旭辉. 基于用户满意效用的空间众包任务分配方法[J]. 《计算机应用》唯一官方网站, 2022, 42(10): 3235-3243. |
| [8] | 马华, 陈跃鹏, 唐文胜, 娄小平, 黄卓轩. 面向工作者能力评估的众包任务分配方法的研究进展综述[J]. 《计算机应用》唯一官方网站, 2021, 41(8): 2232-2241. |
| [9] | 许红亮, 杨桂芹, 蒋占军. 基于软件定义网络的数据中心自适应多路径负载均衡算法[J]. 计算机应用, 2021, 41(4): 1160-1164. |
| [10] | 杨翎, 姜春茂. 基于三支决策的虚拟机节能迁移策略[J]. 计算机应用, 2021, 41(4): 990-998. |
| [11] | 冉家敏, 倪志伟, 彭鹏, 朱旭辉. 考虑空间众包工作者服务质量的任务分配策略及其萤火虫群优化算法求解[J]. 计算机应用, 2021, 41(3): 794-802. |
| [12] | 杨玮, 李然, 张堃. 基于变邻域模拟退火算法的多自动导引车任务分配优化[J]. 计算机应用, 2021, 41(10): 3056-3062. |
| [13] | 余敦辉, 袁旭, 张万山, 王晨旭. 基于动态阈值的时空众包在线分配算法[J]. 计算机应用, 2020, 40(3): 658-664. |
| [14] | 韩俊樱, 张振宇, 孔德仕. 移动群智感知中面向用户区域的分布式多任务分配方法[J]. 《计算机应用》唯一官方网站, 2020, 40(2): 358-362. |
| [15] | 李翠, 陈庆奎. 基于DPDK并行通信的动态监控模型[J]. 《计算机应用》唯一官方网站, 2020, 40(2): 335-341. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||