


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (8): 2564-2571.DOI: 10.11772/j.issn.1001-9081.2023050586
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Gan LI1, Mingdi NIU1,2, Lu CHEN1,2,3( ), Jing YANG4, Tao YAN1,2, Bin CHEN5,6
), Jing YANG4, Tao YAN1,2, Bin CHEN5,6
Received:2023-05-16
Revised:2023-06-12
Accepted:2023-06-16
Online:2023-08-07
Published:2023-08-10
Contact:
Lu CHEN
About author:LI Gan, born in 2001. His research interests include grasp detection, deep learning.Supported by:
李淦1, 牛洺第1,2, 陈路1,2,3(), 杨静4, 闫涛1,2, 陈斌5,6
通讯作者:
陈路
作者简介:李淦(2001—),男,山西吕梁人,主要研究方向:抓取检测、深度学习基金资助:CLC Number:
Gan LI, Mingdi NIU, Lu CHEN, Jing YANG, Tao YAN, Bin CHEN. Robotic grasp detection in low-light environment by incorporating visual feature enhancement mechanism[J]. Journal of Computer Applications, 2023, 43(8): 2564-2571.
李淦, 牛洺第, 陈路, 杨静, 闫涛, 陈斌. 融合视觉特征增强机制的机器人弱光环境抓取检测[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2564-2571.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023050586
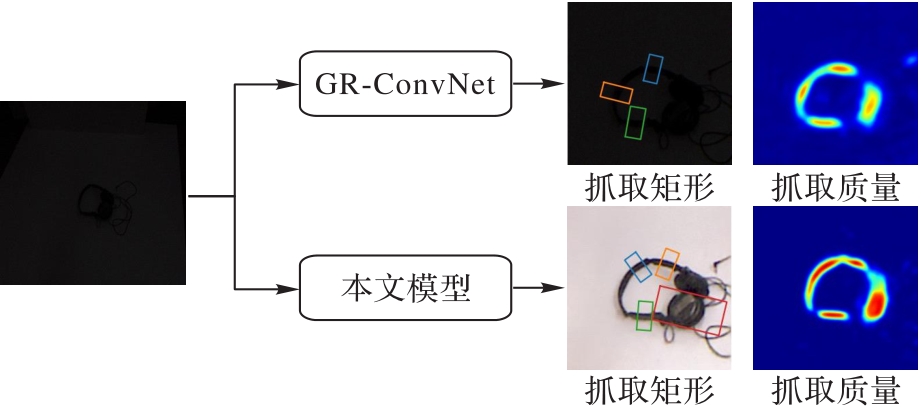
Fig. 1 Comparison of detection results under low-light conditions between GR-ConvNet and our model
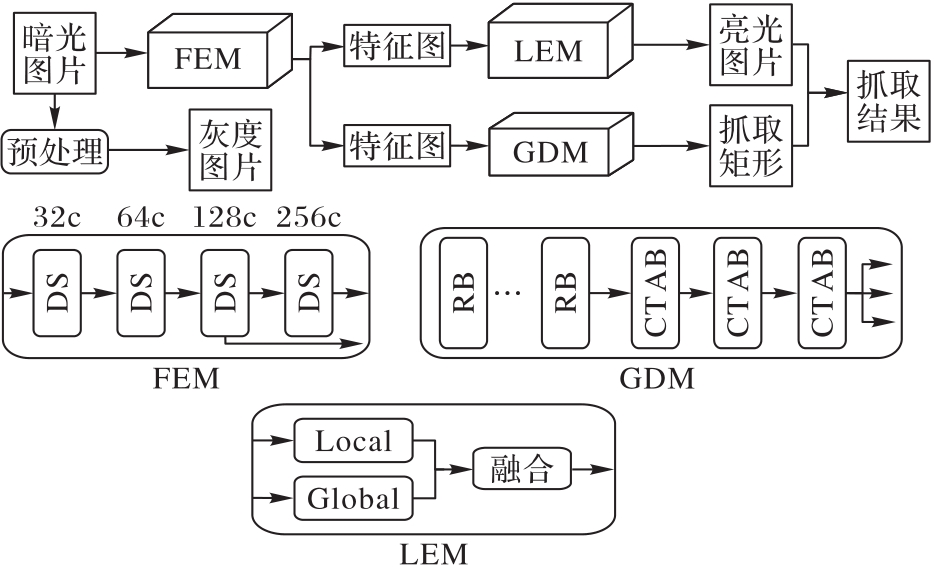
Fig. 2 Overall structure of the proposed low-light grasp detection network
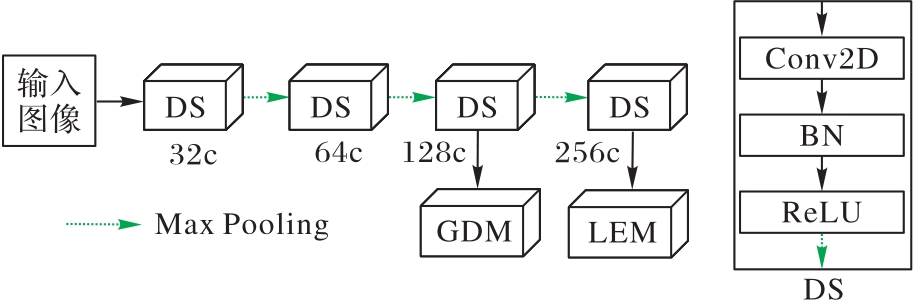
Fig. 3 Structure of feature extraction module
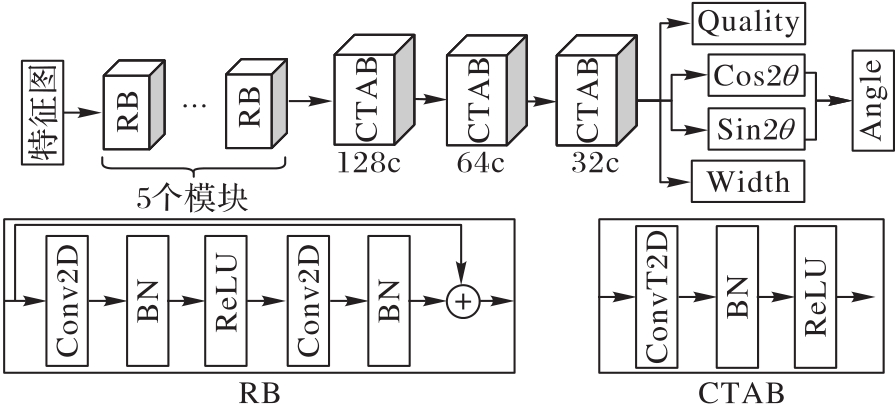
Fig. 4 Structure of grasp detection module
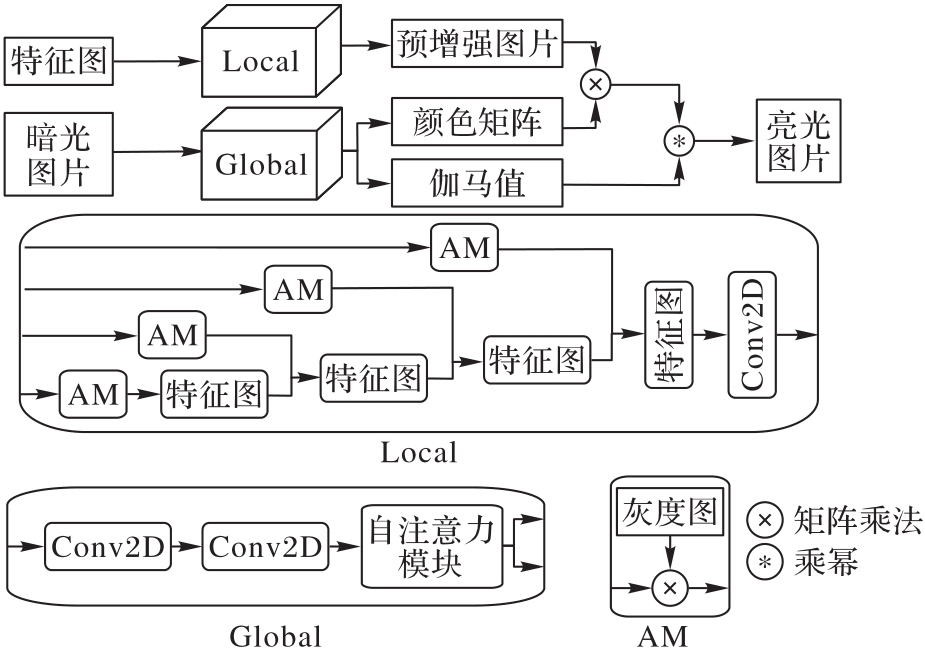
Fig. 5 Structure of low-light enhancement module

Fig. 6 Comparison of low-light Cornell dataset and low-light Jacquard dataset after adjusting different Gamma values and adding different noises
| 模型 | 准确率 | 模型 | 准确率 |
|---|---|---|---|
| GG-CNN[ | 84.0 | ResNet-50[ | 90.7 |
| AlexNet[ | 81.0 | GR-ConvNet[ | 94.3 |
| SqueezeNet[ | 89.3 | 本文模型 | 95.5 |
Tab. 1 Comparison of detection accuracy of different models on low-light Cornell dataset (g=1.5,white Gaussian noise)
| 模型 | 准确率 | 模型 | 准确率 |
|---|---|---|---|
| GG-CNN[ | 84.0 | ResNet-50[ | 90.7 |
| AlexNet[ | 81.0 | GR-ConvNet[ | 94.3 |
| SqueezeNet[ | 89.3 | 本文模型 | 95.5 |
| 模型 | 准确率 | 模型 | 准确率 |
|---|---|---|---|
| GG-CNN[ | 81.9 | GR-ConvNet[ | 82.4 |
| TF-grasp[ | 85.8 | 本文模型 | 87.4 |
Tab. 2 Comparison of detection accuracy of different model on low-light Jacquard dataset (g=1.5,white Gaussian noise)
| 模型 | 准确率 | 模型 | 准确率 |
|---|---|---|---|
| GG-CNN[ | 81.9 | GR-ConvNet[ | 82.4 |
| TF-grasp[ | 85.8 | 本文模型 | 87.4 |
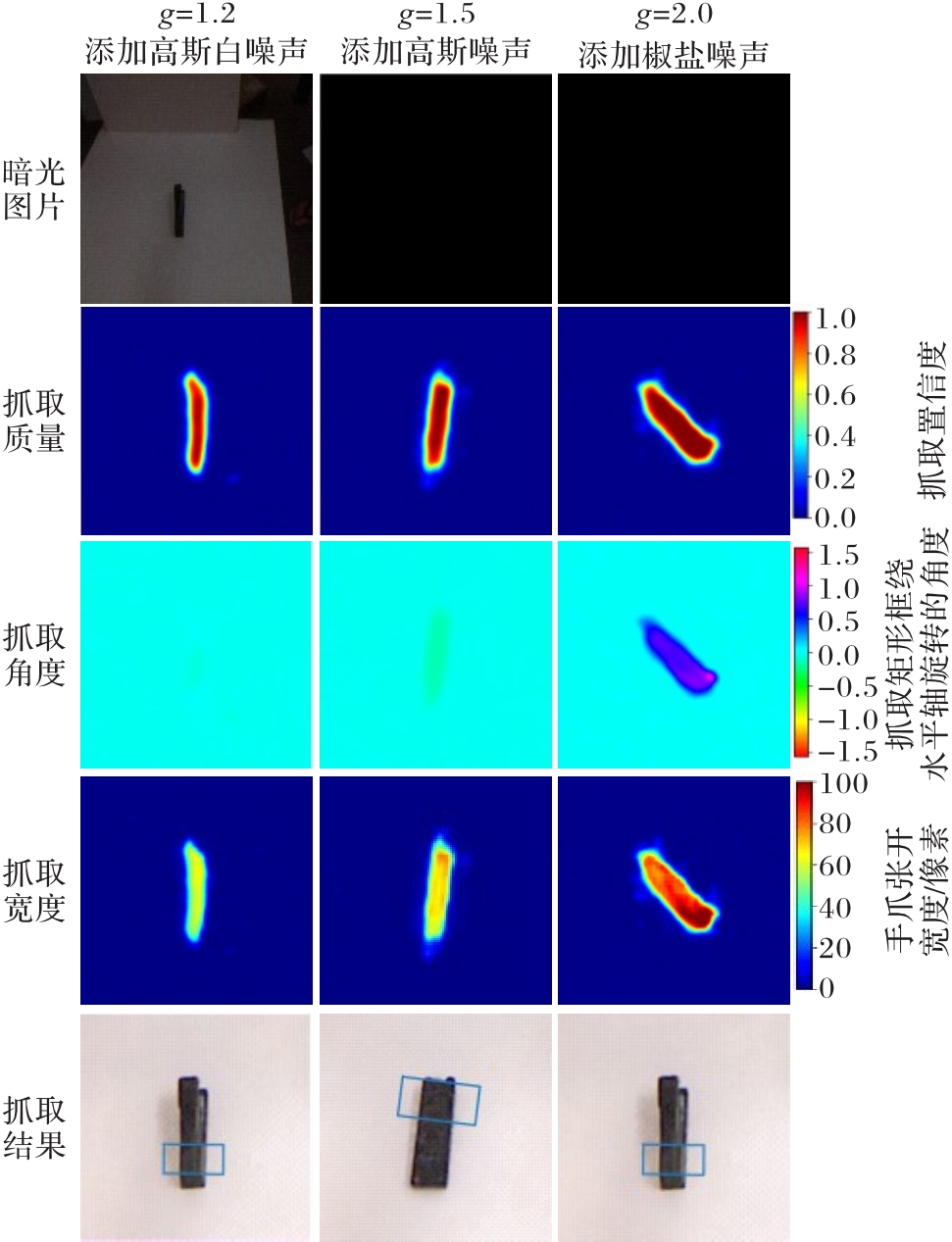
Fig. 7 Grasp detection results on low-light Cornell dataset

Fig. 8 Grasp detection results on low-light Jacquard dataset
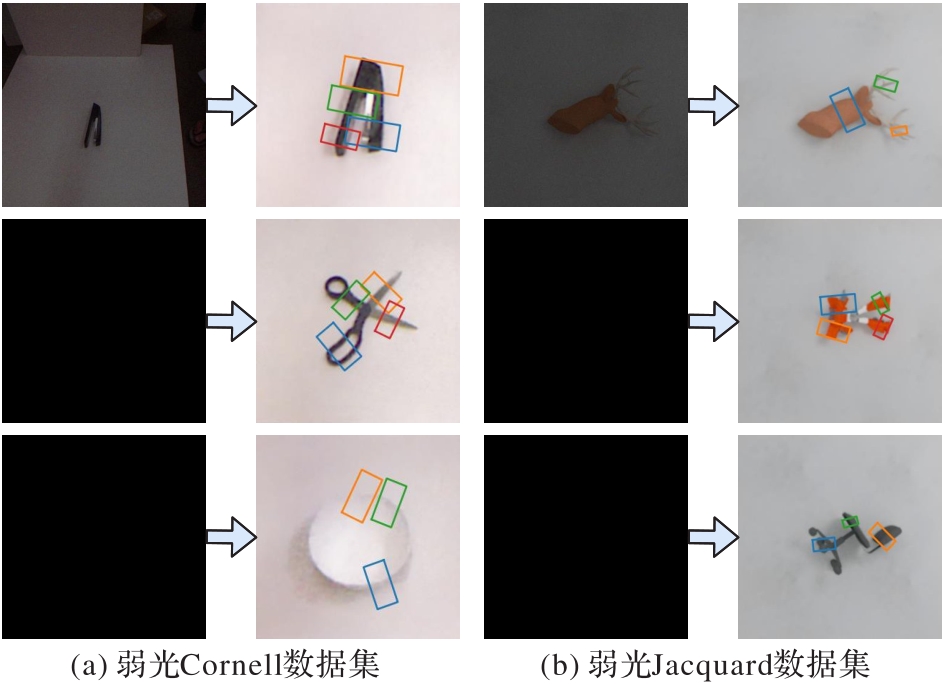
Fig. 9 Comparison of multiple grasp box results
| g值 | 噪声类型 | 准确率/% |
|---|---|---|
| 1.2 | 椒盐噪声 | 96.6 |
| 高斯噪声 | 94.3 | |
| 高斯白噪声 | 96.6 | |
| 泊松噪声 | 95.5 | |
| 乘性噪声 | 97.7 | |
| 1.5 | 椒盐噪声 | 96.6 |
| 高斯噪声 | 97.7 | |
| 高斯白噪声 | 95.5 | |
| 泊松噪声 | 94.4 | |
| 乘性噪声 | 94.4 | |
| 2.0 | 椒盐噪声 | 92.1 |
| 高斯噪声 | 96.6 | |
| 高斯白噪声 | 92.1 | |
| 泊松噪声 | 92.1 | |
| 乘性噪声 | 92.1 |
Tab. 3 Grasp detection results comparison of the proposed algorithm under different Gamma values and noises (low-light Cornell dataset)
| g值 | 噪声类型 | 准确率/% |
|---|---|---|
| 1.2 | 椒盐噪声 | 96.6 |
| 高斯噪声 | 94.3 | |
| 高斯白噪声 | 96.6 | |
| 泊松噪声 | 95.5 | |
| 乘性噪声 | 97.7 | |
| 1.5 | 椒盐噪声 | 96.6 |
| 高斯噪声 | 97.7 | |
| 高斯白噪声 | 95.5 | |
| 泊松噪声 | 94.4 | |
| 乘性噪声 | 94.4 | |
| 2.0 | 椒盐噪声 | 92.1 |
| 高斯噪声 | 96.6 | |
| 高斯白噪声 | 92.1 | |
| 泊松噪声 | 92.1 | |
| 乘性噪声 | 92.1 |
| GDM | Local | Global | 准确率/% |
|---|---|---|---|
| √ | 91.0 | ||
| √ | √ | 93.2 | |
| √ | √ | 94.4 |
Tab. 4 Ablation experimental results on low-light Cornell dataset
| GDM | Local | Global | 准确率/% |
|---|---|---|---|
| √ | 91.0 | ||
| √ | √ | 93.2 | |
| √ | √ | 94.4 |
| 1 | 王耀南,江一鸣,姜娇,等. 机器人感知与控制关键技术及其智能制造应用[J]. 自动化学报, 2023, 49(3): 494-513. |
| WANG Y N, JIANG Y M, JIANG J, et al. Key technologies of robot perception and control and its intelligent manufacturing applications[J]. Acta Automatica Sinica, 2023, 49(3): 494-513. | |
| 2 | 韩鑫,余永维,杜柳青. 基于改进单次多框检测算法的机器人抓取系统[J]. 计算机应用, 2020, 40(8): 2434-2440. |
| HAN X, YU Y W, DU L Q. Robotic grasping system based on improved single shot multibox detector algorithm[J]. Journal of Computer Applications, 2020, 40(8): 2434-2440. | |
| 3 | 姚日辉,陈雯柏,陈启丽,等. 家庭服务机器人知识图谱的构建与应用[J]. 北京邮电大学学报, 2022, 45(5):72-78. |
| YAO R H, CHEN W B, CHEN Q L, et al. Construction and application of knowledge graph for home service robot[J]. Journal of Beijing University of Posts and Telecommunications, 2022, 45(5): 72-78. | |
| 4 | 韩非,张道辉,赵新刚,等. 面向水下抓取作业的复合腔体仿生软体手设计[J]. 机器人, 2023, 45(2):207-217. 10.13973/j.cnki.robot.210473 |
| HAN F, ZHANG D H, ZHAO X G, et al. Design of a bionic soft hand with compound cavity for underwater grasping[J]. Robot, 2023, 45(2): 207-217. 10.13973/j.cnki.robot.210473 | |
| 5 | REDMON J, ANGELOVA A. Real-time grasp detection using convolutional neural networks[C]// Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2015: 1316-1322. 10.1109/icra.2015.7139361 |
| 6 | ASIF U, TANG J B, HARRER S. GraspNet: an efficient convolutional neural network for real-time grasp detection for low-powered devices[C]// Proceedings of the 27th International Joint Conference on Artificial Intelligence. California: ijcai.org, 2018: 4875-4882. 10.24963/ijcai.2018/677 |
| 7 | WU Y X, ZHANG F H, FU Y L. Real-time robotic multigrasp detection using anchor-free fully convolutional grasp detector[J]. IEEE Transactions on Industrial Electronics, 2022, 69(12): 13171-13181. 10.1109/tie.2021.3135629 |
| 8 | YU S, ZHAI D H, XIA Y Q, et al. SE-ResUNet: a novel robotic grasp detection method[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5238-5245. 10.1109/lra.2022.3145064 |
| 9 | KUMRA S, JOSHI S, SAHIN F. Antipodal robotic grasping using generative residual convolutional neural network[C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2020: 9626-9633. 10.1109/iros45743.2020.9340777 |
| 10 | IGNATOV A, KOBYSHEV N, TIMOFTE R, et al. DSLR-quality photos on mobile devices with deep convolutional networks[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 3297-3305. 10.1109/iccv.2017.355 |
| 11 | GOODFELLOW I, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial networks[J]. Communications of the ACM, 2020, 63(11): 139-144. 10.1145/3422622 |
| 12 | SHARMA V, DIBA A, NEVEN D, et al. Classification-driven dynamic image enhancement[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4033-4041. 10.1109/cvpr.2018.00424 |
| 13 | LIU W Y, REN G F, YU R S, et al. Image-adaptive YOLO for object detection in adverse weather conditions[C]// Proceedings of the 36th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2022: 1792-1800. 10.1609/aaai.v36i2.20072 |
| 14 | JIANG Y, MOSESON S, SAXENA A. Efficient grasping from RGBD images: learning using a new rectangle representation[C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 3304-3311. 10.1109/icra.2011.5980145 |
| 15 | PINTO L, GUPTA A. Supersizing self-supervision: learning to grasp from 50K tries and 700 robot hours[C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 3406-3413. 10.1109/icra.2016.7487517 |
| 16 | AINETTER S, FRAUNDORFER F. End-to-end trainable deep neural network for robotic grasp detection and semantic segmentation from RGB[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 13452-13458. 10.1109/icra48506.2021.9561398 |
| 17 | SATISH V, MAHLER J, GOLDBERG K. On-policy dataset synthesis for learning robot grasping policies using fully convolutional deep networks[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 1357-1364. 10.1109/lra.2019.2895878 |
| 18 | CAO H, CHEN G, LI Z J, et al. Lightweight convolutional neural network with Gaussian-based grasping representation for robotic grasping detection[EB/OL]. (2021-01-25) [2023-06-07].. |
| 19 | SONG Y X, WEN J, LIU D F, et al. Deep robotic grasping prediction with hierarchical RGB-D fusion[J]. International Journal of Control, Automation and Systems, 2022, 20(1): 243-254. 10.1007/s12555-020-0197-z |
| 20 | SHUKLA P, PRAMANIK N, MEHTA D, et al. Generative model based robotic grasp pose prediction with limited dataset[J]. Applied Intelligence, 2022, 52(9): 9952-9966. 10.1007/s10489-021-03011-z |
| 21 | WEI C, WANG W J, YANG W H, et al. Deep Retinex decomposition for low-light enhancement[C]// Proceedings of the 2018 British Machine Vision Conference. Durham: BMVA Press, 2018: No.451. 10.48550/arXiv.1808.04560 |
| 22 | WANG Y, CAO Y, ZHA Z J, et al. Progressive Retinex: mutually reinforced illumination-noise perception network for low-light image enhancement[C]// Proceedings of the 27th ACM International Conference on Multimedia. New York: ACM, 2019: 2015-2023. 10.1145/3343031.3350983 |
| 23 | LIU R S, MA L, ZHANG J A, et al. Retinex-inspired unrolling with cooperative prior architecture search for low-light image enhancement[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 10556-10565. 10.1109/cvpr46437.2021.01042 |
| 24 | GUO C L, LI C Y, GUO J C, et al. Zero-reference deep curve estimation for low-light image enhancement[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1777-1786. 10.1109/cvpr42600.2020.00185 |
| 25 | JIANG Y F, GONG X Y, LIU D, et al. EnlightenGAN: deep light enhancement without paired supervision[J]. IEEE Transactions on Image Processing, 2021, 30: 2340-2349. 10.1109/tip.2021.3051462 |
| 26 | CUI Z T, LI K C, GU L, et al. You only need 90k parameters to adapt light: a light weight transformer for image enhancement and exposure correction[C]// Proceedings of the 2022 British Machine Vision Conference. Durham: BMVA Press, 2022: No.238. |
| 27 | MORRISON D, CORKE P, LEITNER J. Learning robust, real-time, reactive robotic grasping[J]. The International Journal of Robotics Research, 2020, 39(2/3): 183-201. 10.1177/0278364919859066 |
| 28 | RONNEBERGER O, FISCHER P, BROX T. U-Net: convolutional networks for biomedical image segmentation[C]// Proceedings of the 2015 Medical Image Computing and Computer-Assisted Intervention, LNCS 9351. Cham: Springer, 2015: 234-241. |
| 29 | DEPIERRE A, DELLANDRÉA E, CHEN L M. Jacquard: a large scale dataset for robotic grasp detection[C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 3511-3516. 10.1109/iros.2018.8593950 |
| 30 | IANDOLA F N, HAN S, MOSKEWICZ M W, et al. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5 MB model size[EB/OL]. (2016-11-04) [2023-06-07].. |
| 31 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| 32 | WANG S C, ZHOU Z L, KAN Z. When transformer meets robotic grasping: exploits context for efficient grasp detection[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 8170-8177. 10.1109/lra.2022.3187261 |
| [1] | Rui SHI, Yong LI, Yanhan ZHU. Adversarial sample attack algorithm of modulation signal based on equalization of feature gradient [J]. Journal of Computer Applications, 2024, 44(8): 2521-2527. |
| [2] | Haodong HE, Hao FU, Qiang WANG, Shuai ZHOU, Wei LIU. Multi-robot path following and formation based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(8): 2626-2633. |
| [3] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [4] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [5] | Mei WANG, Xuesong SU, Jia LIU, Ruonan YIN, Shan HUANG. Time series classification method based on multi-scale cross-attention fusion in time-frequency domain [J]. Journal of Computer Applications, 2024, 44(6): 1842-1847. |
| [6] | Bin XIAO, Mo YANG, Min WANG, Guangyuan QIN, Huan LI. Domain generalization method of phase-frequency fusion from independent perspective [J]. Journal of Computer Applications, 2024, 44(4): 1002-1009. |
| [7] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [8] | Mengmei YAN, Dongping YANG. Review of mean field theory for deep neural network [J]. Journal of Computer Applications, 2024, 44(2): 331-343. |
| [9] | Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot [J]. Journal of Computer Applications, 2024, 44(2): 445-451. |
| [10] | Jiachen YU, Ye YANG. Irregular object grasping by soft robotic arm based on clipped proximal policy optimization algorithm [J]. Journal of Computer Applications, 2024, 44(11): 3629-3638. |
| [11] | Wenze CHAI, Jing FAN, Shukui SUN, Yiming LIANG, Jingfeng LIU. Overview of deep metric learning [J]. Journal of Computer Applications, 2024, 44(10): 2995-3010. |
| [12] | Enbao QIAO, Xiangyang GAO, Jun CHENG. Self-recovery adaptive Monte Carlo localization algorithm based on support vector machine [J]. Journal of Computer Applications, 2024, 44(10): 3246-3251. |
| [13] | Xujian ZHAO, Hanglin LI. Deep neural network compression algorithm based on hybrid mechanism [J]. Journal of Computer Applications, 2023, 43(9): 2686-2691. |
| [14] | Yunfei SHEN, Fei SHEN, Fang LI, Jun ZHANG. Deep neural network model acceleration method based on tensor virtual machine [J]. Journal of Computer Applications, 2023, 43(9): 2836-2844. |
| [15] | Xiaolin LI, Songjia YANG. Hybrid beamforming for multi-user mmWave relay networks using deep learning [J]. Journal of Computer Applications, 2023, 43(8): 2511-2516. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||