


《计算机应用》唯一官方网站 ›› 2021, Vol. 41 ›› Issue (12): 3558-3564.DOI: 10.11772/j.issn.1001-9081.2021060888
所属专题: 第十八届中国机器学习会议(CCML 2021)
• 第十八届中国机器学习会议(CCML 2021) • 上一篇 下一篇
李二超( ), 齐款款
), 齐款款
收稿日期:2021-05-12
修回日期:2021-06-13
接受日期:2021-07-05
发布日期:2021-12-28
出版日期:2021-12-10
通讯作者:
李二超
作者简介:齐款款(1993—),男,安徽界首人,硕士研究生,主要研究方向:移动机器人。
基金资助:Received:2021-05-12
Revised:2021-06-13
Accepted:2021-07-05
Online:2021-12-28
Published:2021-12-10
Contact:
Erchao LI
About author:QI Kuankuan, born in 1993, M. S. candidate. His research interests include mobile robot.
Supported by:摘要:
针对蚁群算法在静态环境下全局路径规划存在无法找到最短路径、收敛速度慢、路径搜索盲目性大、拐点多等问题,提出一种改进蚁群算法。以栅格地图为机器人运行环境,对初始信息素进行非均匀分布,使路径搜索更倾向于起点和目标点的连线附近;把当前节点、下一节点和目标点的信息加入启发式函数,同时引入动态调节因子,促使启发函数在迭代前期起主导作用,而后期则加强信息素引导;引入伪随机转移策略,以减少路径选择的盲目性,加快找到最短路径;动态调整挥发系数,使得前期挥发系数大,后期较小,从而避免算法陷入早熟;在最优解的基础上,引入B样条曲线平滑策略,以进一步优化最优解,使得到的路径更短且更加平滑。对改进算法的主要参数进行敏感性分析,并对该算法的各改进环节的可行性与有效性进行了实验,而且在20×20和50×50环境下与传统蚁群算法及其他改进蚁群算法进行仿真对比,实验结果验证了改进算法的可行性、有效性和优越性。
中图分类号:
李二超, 齐款款. B样条曲线融合蚁群算法的机器人路径规划[J]. 计算机应用, 2021, 41(12): 3558-3564.
Erchao LI, Kuankuan QI. Robot path planning based on B-spline curve and ant colony algorithm[J]. Journal of Computer Applications, 2021, 41(12): 3558-3564.
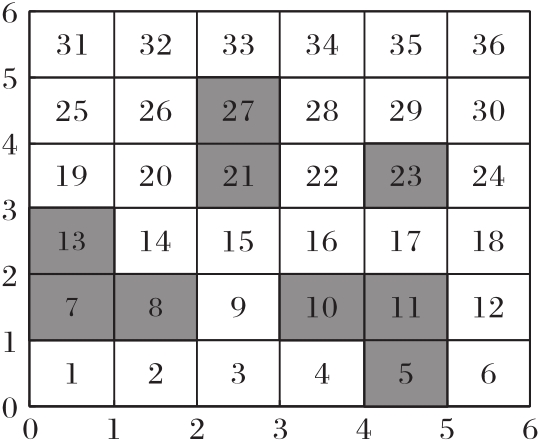
图1 栅格地图
Fig. 1 Grid map
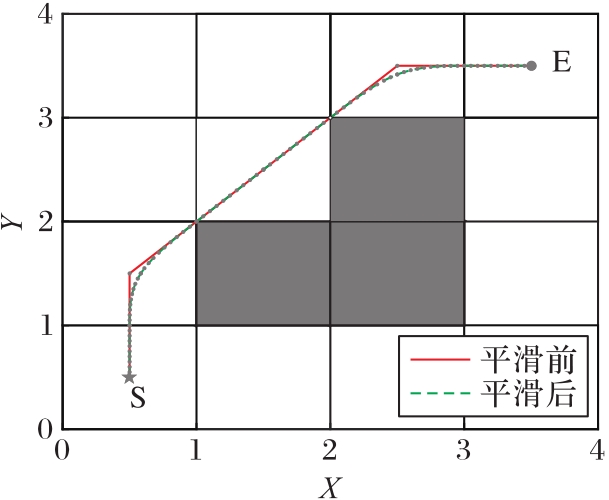
图2 B样条曲线平滑最优路径仿真示意图
Fig. 2 Simulation diagram of B-spline curve smoothing optimal path
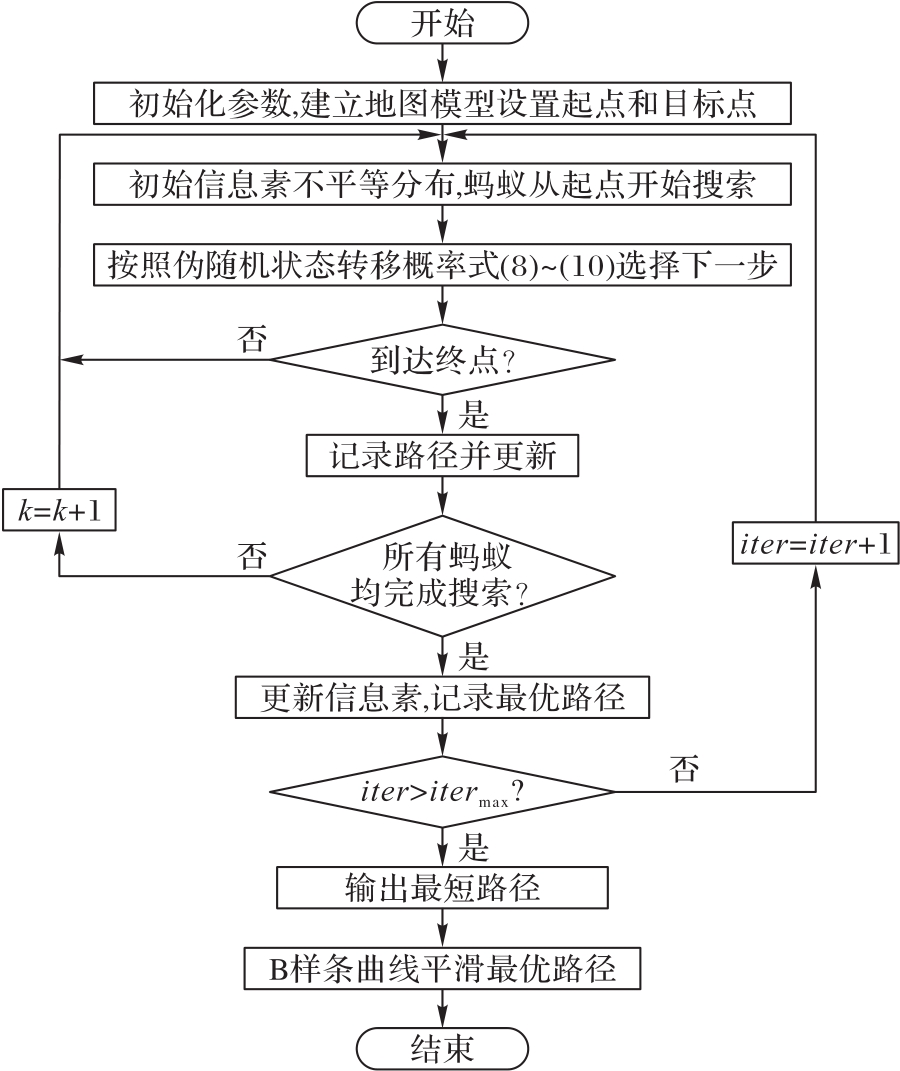
图3 改进蚁群算法流程
Fig. 3 Flowchart of improved ant colony algorithm
| Q | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| 1 | 48.321 9 | 42.7 |
| 50 | 47.792 6 | 57.2 |
| 100 | 47.421 9 | 53.9 |
| 150 | 46.885 5 | 52.3 |
| 200 | 46.907 7 | 60.6 |
表1 参数Q对路径长度和迭代次数的影响
Tab. 1 Influence of parameter Q on path length and iteration times
| Q | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| 1 | 48.321 9 | 42.7 |
| 50 | 47.792 6 | 57.2 |
| 100 | 47.421 9 | 53.9 |
| 150 | 46.885 5 | 52.3 |
| 200 | 46.907 7 | 60.6 |
| [q0, q1] | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.8,0.9] | 46.671 3 | 49.4 |
| [0.7,0.9] | 46.605 6 | 66.9 |
| [0.7,0.8] | 46.659 1 | 55.4 |
| [0.6,0.9] | 46.900 6 | 63.4 |
| [0.6,0.8] | 47.237 0 | 62.1 |
| [0.6,0.7] | 46.705 6 | 66.2 |
| [0.5,0.9] | 48.109 8 | 54.4 |
| [0.5,0.8] | 48.704 7 | 72.3 |
| [0.5,0.7] | 48.368 3 | 54.7 |
| [0.5,0.6] | 48.887 6 | 59.9 |
表2 参数[q0, q1]对路径长度和迭代次数的影响
Tab. 2 Influence of parameters [q0,q1] on path length and iteration times
| [q0, q1] | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.8,0.9] | 46.671 3 | 49.4 |
| [0.7,0.9] | 46.605 6 | 66.9 |
| [0.7,0.8] | 46.659 1 | 55.4 |
| [0.6,0.9] | 46.900 6 | 63.4 |
| [0.6,0.8] | 47.237 0 | 62.1 |
| [0.6,0.7] | 46.705 6 | 66.2 |
| [0.5,0.9] | 48.109 8 | 54.4 |
| [0.5,0.8] | 48.704 7 | 72.3 |
| [0.5,0.7] | 48.368 3 | 54.7 |
| [0.5,0.6] | 48.887 6 | 59.9 |
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.1,0.9] | 46.812 7 | 55.9 |
| [0.1,0.8] | 46.647 0 | 64.7 |
| [0.1,0.7] | 46.547 0 | 54.6 |
| [0.2,0.9] | 46.737 0 | 71.6 |
| [0.2,0.8] | 46.564 2 | 53.0 |
| [0.2,0.7] | 46.588 4 | 53.5 |
| [0.3,0.9] | 46.605 6 | 55.7 |
| [0.3,0.8] | 46.310 6 | 54.8 |
| [0.3,0.7] | 46.429 9 | 68.2 |
表3 参数[ρmin,ρmax]对路径长度和迭代次数的影响
Tab. 3 Influence of parameters [ρmin,ρmax] on path length and iteration times
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.1,0.9] | 46.812 7 | 55.9 |
| [0.1,0.8] | 46.647 0 | 64.7 |
| [0.1,0.7] | 46.547 0 | 54.6 |
| [0.2,0.9] | 46.737 0 | 71.6 |
| [0.2,0.8] | 46.564 2 | 53.0 |
| [0.2,0.7] | 46.588 4 | 53.5 |
| [0.3,0.9] | 46.605 6 | 55.7 |
| [0.3,0.8] | 46.310 6 | 54.8 |
| [0.3,0.7] | 46.429 9 | 68.2 |
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [1,1] | 47.092 6 | 63.1 |
| [ | 47.061 2 | 44.9 |
| [ | 46.800 6 | 54.6 |
| [ | 46.471 3 | 58.4 |
| [ | 46.724 8 | 48.0 |
| [ | 46.610 6 | 63.1 |
| [ | 46.564 2 | 56.5 |
| [ | 46.659 1 | 49.9 |
| [0.8, 4] | 46.822 7 | 58.4 |
| [ | 47.021 9 | 52.2 |
表4 参数[α,β]对路径长度和迭代次数的影响
Tab. 4 Influence of parameters [α,β] on path length and iteration times
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [1,1] | 47.092 6 | 63.1 |
| [ | 47.061 2 | 44.9 |
| [ | 46.800 6 | 54.6 |
| [ | 46.471 3 | 58.4 |
| [ | 46.724 8 | 48.0 |
| [ | 46.610 6 | 63.1 |
| [ | 46.564 2 | 56.5 |
| [ | 46.659 1 | 49.9 |
| [0.8, 4] | 46.822 7 | 58.4 |
| [ | 47.021 9 | 52.2 |
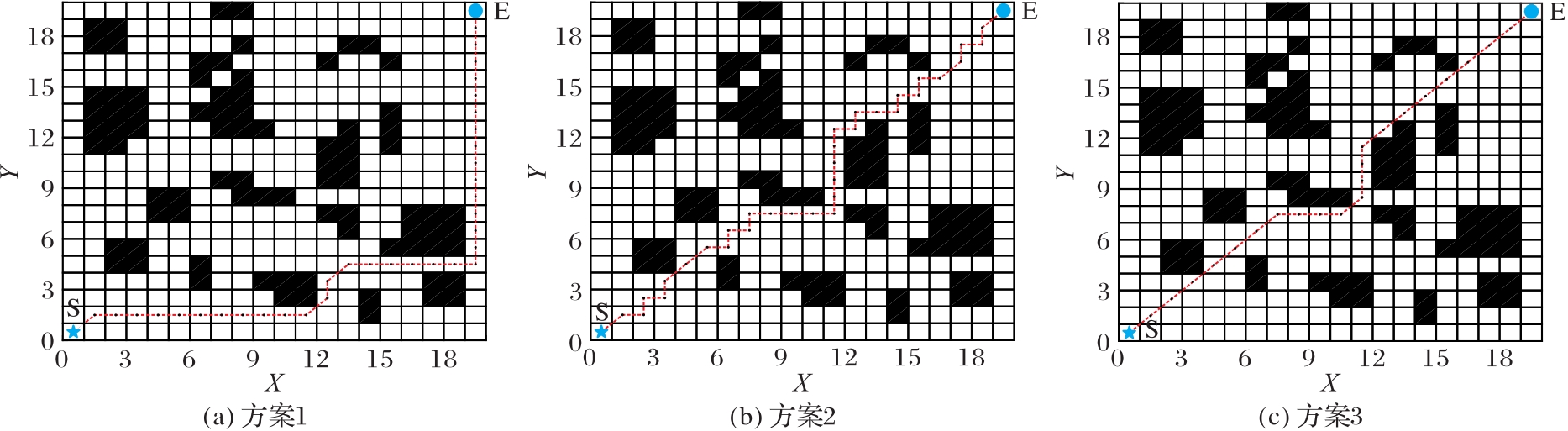
图4 20×20运行环境下不同方案的最优路径对比
Fig. 6 Comparison of optimal paths of different schemes in 20×20 running environment

图5 20×20运行环境下各算法平滑前后最优路径对比
Fig. 5 Comparison of optimal paths of each algorithm before and after smoothing in 20×20 running environment
| 算法 | 路径长度 | 最短路径次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 方案1 | 36.242 6 | 37.414 2 | 36.805 0 | 0.16 | 3 | — | 4 | 11 | 7.1 | 1.40 | 20.4 | 7.144 5 |
| 方案2 | 35.071 1 | 36.242 6 | 35.774 0 | 0.33 | 4 | — | 22 | 28 | 25.1 | 1.10 | 43.6 | 6.289 6 |
| 方案3 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | — | 4 | 8 | 4.5 | 1.02 | 1.0 | 4.886 1 |
| 传统算法 | 41.414 2 | 61.414 2 | 50.199 3 | 4.35 | 1 | 39.241 0 | 13 | 41 | 28.1 | 5.70 | 5.9 | 10.846 7 |
| 文献[ | 28.627 4 | 30.627 4 | 29.485 5 | 0.58 | 9 | 28.377 8 | 4 | 16 | 8.6 | 2.59 | 4.0 | 4.121 4 |
| 本文算法 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | 28.377 8 | 4 | 6 | 4.3 | 0.74 | 1.0 | 3.730 4 |
表5 20×20运行环境下的仿真结果
Tab. 5 Simulation results in 20×20 running environment
| 算法 | 路径长度 | 最短路径次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 方案1 | 36.242 6 | 37.414 2 | 36.805 0 | 0.16 | 3 | — | 4 | 11 | 7.1 | 1.40 | 20.4 | 7.144 5 |
| 方案2 | 35.071 1 | 36.242 6 | 35.774 0 | 0.33 | 4 | — | 22 | 28 | 25.1 | 1.10 | 43.6 | 6.289 6 |
| 方案3 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | — | 4 | 8 | 4.5 | 1.02 | 1.0 | 4.886 1 |
| 传统算法 | 41.414 2 | 61.414 2 | 50.199 3 | 4.35 | 1 | 39.241 0 | 13 | 41 | 28.1 | 5.70 | 5.9 | 10.846 7 |
| 文献[ | 28.627 4 | 30.627 4 | 29.485 5 | 0.58 | 9 | 28.377 8 | 4 | 16 | 8.6 | 2.59 | 4.0 | 4.121 4 |
| 本文算法 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | 28.377 8 | 4 | 6 | 4.3 | 0.74 | 1.0 | 3.730 4 |
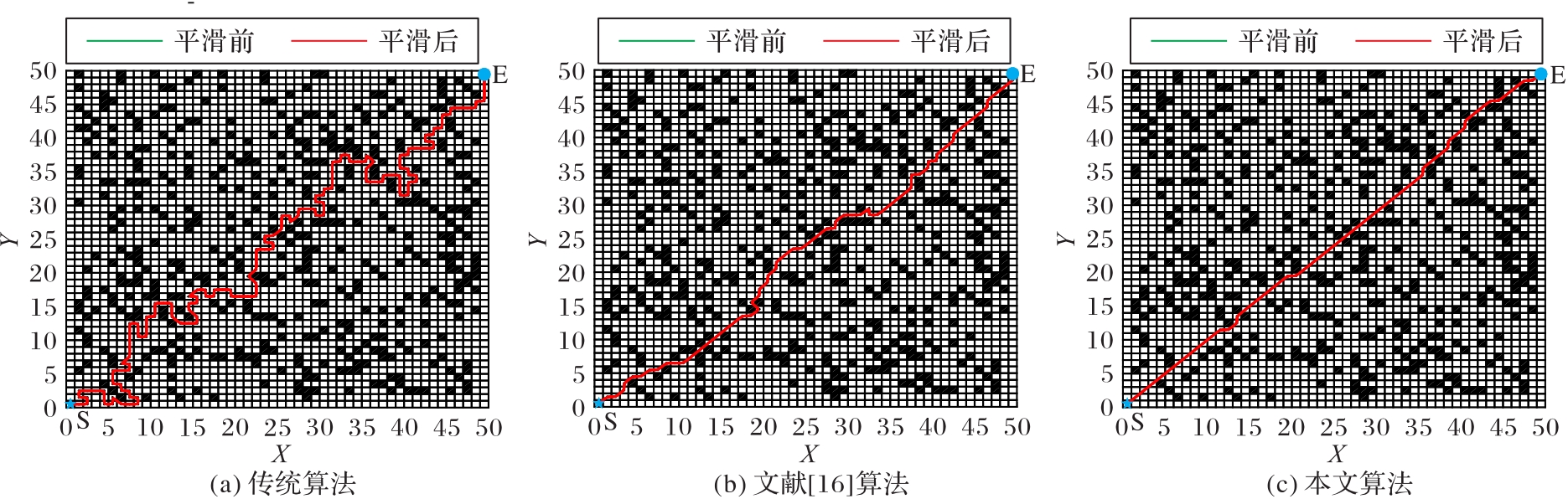
图6 50×50复杂环境下各算法平滑前后最优路径对比
Fig. 6 Comparison of optimal paths of each algorithm before and after smoothing in 50 × 50 complex environment

图7 50×50复杂环境下各算法收敛曲线
Fig. 7 Convergence curve of each algorithm in 50 × 50 complex environment
| 算法 | 路径长度 | 最短次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 传统算法 | 159.899 5 | 333.982 8 | 235.697 9 | 42.40 | 1 | 146.179 5 | 102 | 232 | 155.8 | 30.44 | 52.0 | 23.272 0 |
| 文献[ | 78.083 3 | 98.911 7 | 86.409 2 | 3.82 | 1 | 75.956 7 | 34 | 60 | 44.8 | 5.07 | 57.9 | 20.044 6 |
| 本文算法 | 71.639 6 | 71.639 6 | 71.639 6 | 0.00 | 50 | 70.974 1 | 14 | 16 | 15.9 | 0.49 | 1.9 | 16.208 5 |
表6 50×50复杂环境下三种算法的仿真结果
Tab. 6 Simulation results of three algorithms in 50 × 50 complex environment
| 算法 | 路径长度 | 最短次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 传统算法 | 159.899 5 | 333.982 8 | 235.697 9 | 42.40 | 1 | 146.179 5 | 102 | 232 | 155.8 | 30.44 | 52.0 | 23.272 0 |
| 文献[ | 78.083 3 | 98.911 7 | 86.409 2 | 3.82 | 1 | 75.956 7 | 34 | 60 | 44.8 | 5.07 | 57.9 | 20.044 6 |
| 本文算法 | 71.639 6 | 71.639 6 | 71.639 6 | 0.00 | 50 | 70.974 1 | 14 | 16 | 15.9 | 0.49 | 1.9 | 16.208 5 |
| 1 | 杨凯,龙佳,马雪燕,等. 移动机器人改进人工势场的路径规划方法研究[J]. 现代电子技术, 2020, 43(7):141-145. |
| YANG K, LONG J, MA X Y, et al. Research on mobile robot path planning method based on improved artificial potential field [J]. Modern Electronics Technology, 2020, 43(7):141-145. | |
| 2 | 宋宇,王志明. 改进A星算法移动机器人路径规划[J]. 长春工业大学学报, 2019, 40(2):138-141. |
| SONG Y, WANG Z M. Path planning simulation based on improved A star algorithm[J]. Journal of Changchun University of Technology, 2019, 40(2):138-141. | |
| 3 | 王玉,沈丹峰,李耀杰,等. 融合跳点搜索与双向蚁群算法的AGV路径规划[J]. 西安工程大学学报, 2021, 35(1):37-43. 10.13338/j.issn.1674-649x.2021.01.006 |
| WANG Y, SHEN D F, LI Y J, et al. Path planning of AGV based on JPS bidirectional ant colony algorithm[J]. Journal of Xi’an Polytechnic University, 2021, 35(1):37-43. 10.13338/j.issn.1674-649x.2021.01.006 | |
| 4 | 刘超. 基于改进遗传算法的多无人机航路规划方法[J]. 火力与指挥控制, 2019, 44(1):18-22. 10.3969/j.issn.1002-0640.2019.01.004 |
| LIU C. Method of path planning for multi-UAV based on improved genetic algorithm[J]. Fire Control and Command Control, 2019, 44(1):18-22. 10.3969/j.issn.1002-0640.2019.01.004 | |
| 5 | 赵开新,王东署,徐立新. 蚁群遗传算法在移动机器人路径规划中的综合应用研究[J]. 制造业自动化, 2014, 36(17):70-72, 84. 10.3969/j.issn.1009-0134.2014.17.018 |
| ZHAO K X, WANG D S, XU L X. Comprehensive application of ant colony genetic algorithm in mobile robot path planning[J]. Manufacturing Automation, 2014, 36(17):70-72, 84. 10.3969/j.issn.1009-0134.2014.17.018 | |
| 6 | 王晓燕,杨乐,张宇,等. 基于改进势场蚁群算法的机器人路径规划[J]. 控制与决策, 2018, 33(10):1775-1781. 10.13195/j.kzyjc.2017.0639 |
| WANG X Y, YANG L, ZHANG Y, et al. Robot path planning based on improved ant colony algorithm with potential field heuristic[J]. Control and Decision, 2018, 33(10):1775-1781. 10.13195/j.kzyjc.2017.0639 | |
| 7 | 刘泽,金世俊,王庆. 基于改进蚁群算法的移动机器人二维路径规划[J]. 传感器与微系统, 2020, 39(10):149-152. 10.4028/www.scientific.net/amm.385-386.717 |
| LIU Z, JIN S J, WANG Q. 2D path planning of mobile robots based on improved ant colony algorithm[J]. Transducer and Microsystem Technologies, 2020, 39(10):149-152. 10.4028/www.scientific.net/amm.385-386.717 | |
| 8 | 孟冠军,陈信华,陶细佩,等. 基于混合蚁群算法的AGV路径规划[J]. 组合机床与自动化加工技术, 2021(1):70-73. |
| MENG G J, CHEN X H, TAO X P, et al. AGV path planning based on hybrid ant colony algorithm[J]. Modular Machine Tool and Automatic Processing Technique, 2021(1):70-73. | |
| 9 | 曹新亮,王智文,冯晶,等. 基于改进蚁群算法的机器人全局路径规划研究[J]. 计算机工程与科学, 2020, 42(3):564-570. 10.3969/j.issn.1007-130X.2020.03.025 |
| CAO X L, WANG Z W, FENG J, et al. Global path planning of robots path planning based on improved ant colony algorithm[J]. Computer Engineering and Science, 2020, 42(3):564-570. 10.3969/j.issn.1007-130X.2020.03.025 | |
| 10 | 王红君,徐军,赵辉,等. 基于平滑蚁群算法的机器人路径规划[J]. 燕山大学学报, 2017, 41(3):278-282. 10.3969/j.issn.1007-791X.2017.03.012 |
| WANG H J, XU J, ZHAO H, et al. Mobile robot path planning based on smoothing ant colony algorithm[J]. Journal of Yanshan University, 2017, 41(3):278-282. 10.3969/j.issn.1007-791X.2017.03.012 | |
| 11 | LUO Q, WANG H B, ZHENG Y, et al. Research on path planning of mobile robot based on improved ant colony algorithm[J]. Neural Computing and Applications, 2020, 32(6):1555-1566. 10.1007/s00521-019-04172-2 |
| 12 | 李志锟,黄宜庆,徐玉琼. 改进变步长蚁群算法的移动机器人路径规划[J]. 电子测量与仪器学报, 2020, 34(8):15-21. |
| LI Z K, HUANG Y Q, XU Y Q. Path planning of mobile robot based on improved variable step size ant colony algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34(8):15-21. | |
| 13 | 胡浍冕,于修成. 基于双向搜索策略的改进蚁群路径规划算法[J]. 农业装备与车辆工程, 2019, 57(7):9-12, 20. 10.3969/j.issn.1673-3142.2019.07.003 |
| HU H M, YU X C. Improved ant colony path planning algorithm based on bidirectional search strategy[J]. Agricultural Equipment and Vehicle Engineering, 2019, 57(7):9-12, 20. 10.3969/j.issn.1673-3142.2019.07.003 | |
| 14 | 张军明,张德祥,王硕. 基于优化蚁群算法的机器人路径规划[J]. 自动化技术与应用, 2016, 35(11):6-10, 29. 10.1142/9789813220362_0097 |
| ZHANG J M, ZHANG D X, WANG S. Path planning of robot based on ant colony algorithm[J]. Techniques of Automation and Applications, 2016, 35(11): 6-10, 29. 10.1142/9789813220362_0097 | |
| 15 | 封声飞,雷琦,吴文烈,等. 自适应蚁群算法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(17):35-43. 10.3778/j.issn.1002-8331.1903-0401 |
| FENG S F, LEI Q, WU W L, et al. Mobile robot path planning based on adaptive ant colony algorithm[J]. Computer Engineering and Applications, 2019, 55(17): 35-43. 10.3778/j.issn.1002-8331.1903-0401 | |
| 16 | 赵静,汤云峰,蒋国平,等. 基于改进蚁群算法的移动机器人路径规划[J]. 南京邮电大学学报(自然科学版), 2019, 39(6):73-78. 10.14132/j.cnki.1673-5439.2019.06.011 |
| ZHAO J, TANG Y F, JIANG G P, et al. Mobile robot path planning based on improved ant colony algorithm[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2019, 39(6):73-78. 10.14132/j.cnki.1673-5439.2019.06.011 |
| [1] | 胡映, 陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2294-2300. |
| [2] | 马天, 席润韬, 吕佳豪, 曾奕杰, 杨嘉怡, 张杰慧. 基于深度强化学习的移动机器人三维路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2055-2064. |
| [3] | 田润泽, 周宇龙, 朱洪, 薛岗. 基于局部信息的服务迁移路径选择算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2168-2174. |
| [4] | 李建强, 何舟. 面向多行程取送货车辆路径问题的混合NSGA-Ⅱ[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1187-1194. |
| [5] | 黄海新, 于广威, 程寿山, 李春明. 基于改进灰狼优化的桥梁检测爬壁机器人全覆盖路径规划[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 966-971. |
| [6] | 邓辅秦, 官桧锋, 谭朝恩, 付兰慧, 王宏民, 林天麟, 张建民. 基于请求与应答通信机制和局部注意力机制的多机器人强化学习路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 432-438. |
| [7] | 宋紫阳, 李军怀, 王怀军, 苏鑫, 于蕾. 基于路径模仿和SAC强化学习的机械臂路径规划算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 439-444. |
| [8] | 邓辅秦, 谭朝恩, 黎俊炜, 钟家铭, 付兰慧, 张建民, 王宏民, 李楠楠, 姜炳春, 林天麟. 面向大型仓储环境的基于冲突搜索算法[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3854-3860. |
| [9] | 孙鉴, 马宝全, 吴隹伟, 杨晓焕, 武涛, 陈攀. 地震场景下无人机群路径规划与任务分配均衡联合优化[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3232-3239. |
| [10] | 乔恩保, 高向阳, 程俊. 基于支持向量机的自恢复自适应蒙特卡洛定位算法[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3246-3251. |
| [11] | 朱东莹, 钟勇, 杨观赐, 李杨. 动态环境下视觉定位与建图的运动分割研究进展[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2537-2545. |
| [12] | 李永迪, 李彩虹, 张耀玉, 张国胜. 基于改进SAC算法的移动机器人路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 654-660. |
| [13] | 黄霖, 符强, 童楠. 基于自适应调整哈里斯鹰优化算法求解机器人路径规划问题[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3840-3847. |
| [14] | 王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823. |
| [15] | 刘晨, 陈洋, 符浩. 基于值函数迭代的持续监测无人机路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3290-3296. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||