《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (12): 3924-3930.DOI: 10.11772/j.issn.1001-9081.2021101778
申炳琦1,2, 张志明1( ), 舒少龙1
), 舒少龙1
Bingqi SHEN1,2, Zhiming ZHANG1(), Shaolong SHU1
摘要:
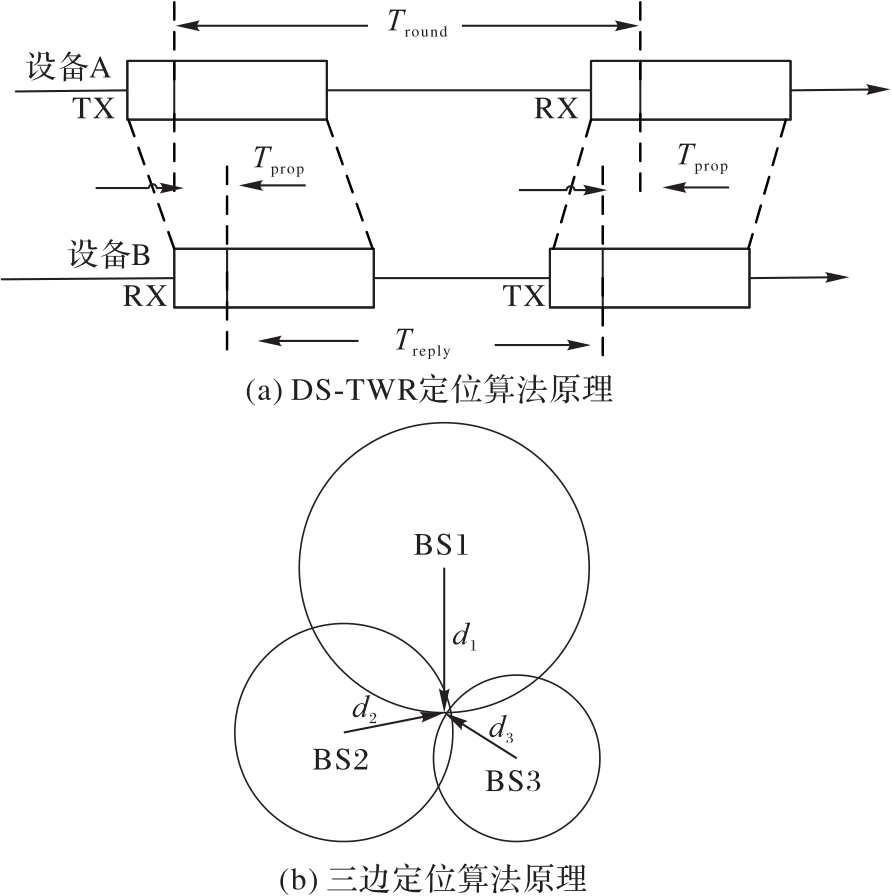
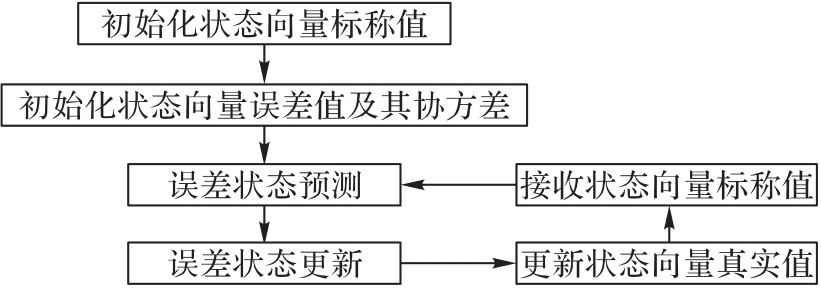
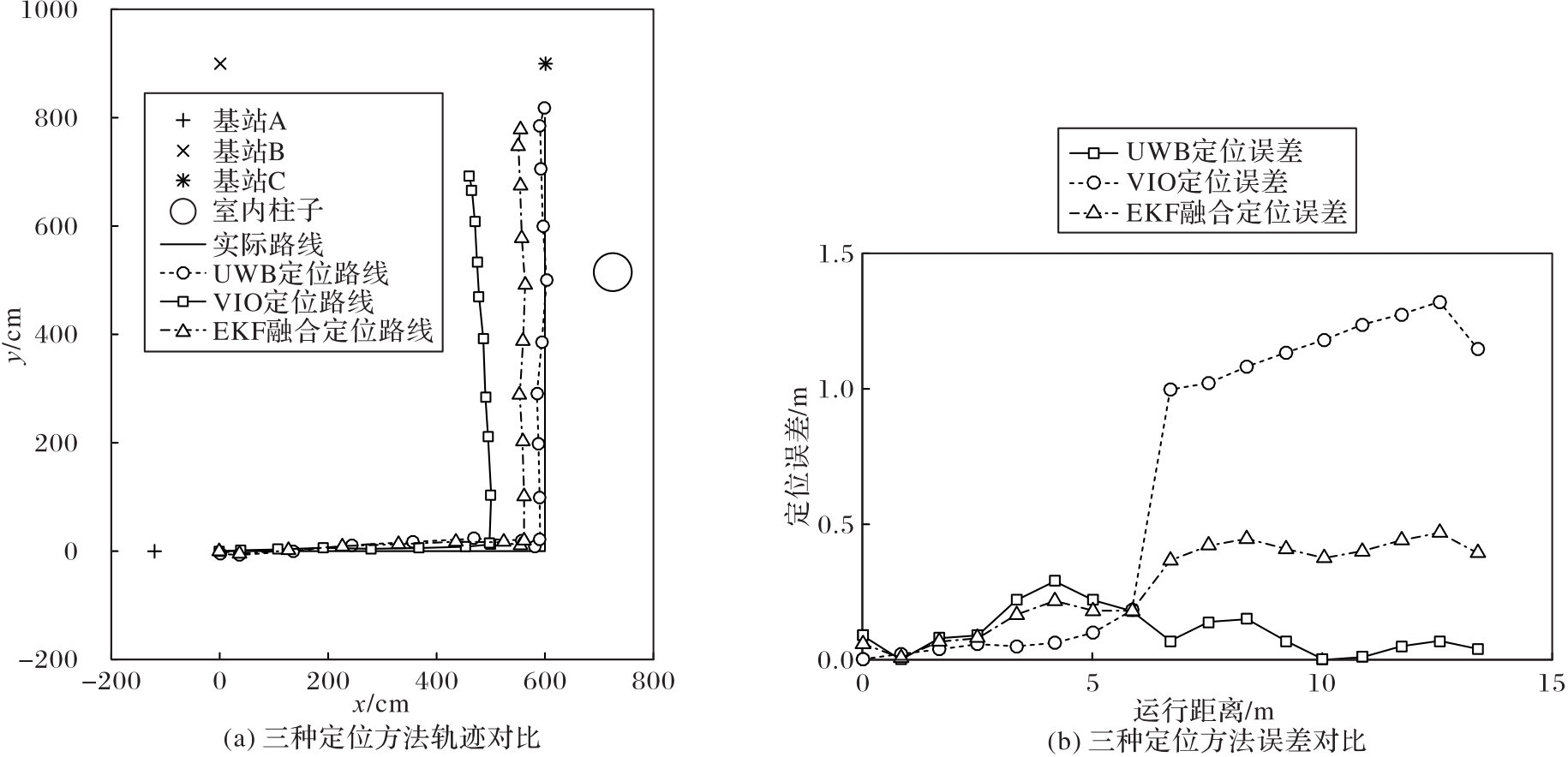
对于移动机器人在室内环境的定位任务,新兴的基于视觉惯性里程计(VIO)的辅助定位技术受光线条件限制大,无法在黑暗环境中工作,且超宽带(UWB)定位易受非视距(NLOS)误差影响。针对以上问题,提出一种UWB与VIO组合的室内移动机器人定位算法。首先,采用立体视觉多状态约束下的Kalman滤波器(S-MSCKF)算法/双边双向测距(DS-TWR)算法和三边定位法,分别得到VIO输出的位置信息/UWB解算的定位信息;然后,建立位置测量系统的运动方程与观测方程;最后,通过误差状态扩展卡尔曼滤波(ES-EKF)算法来进行数据融合,得到机器人的最优位置估计。使用搭建的移动定位平台在不同的室内环境下对组合定位方算法进行验证。实验结果表明在有障碍物的室内环境下,与单一UWB定位方法相比,所提算法的总体定位的最大误差减小了约4.4%,均方误差减小了约6.3%;与VIO定位方法相比,所提算法的总体定位的最大误差减小了约31.5%,均方误差减小了约60.3%。可见所提算法可为室内环境下的移动机器人提供实时、精确且鲁棒的定位结果。
中图分类号: