


《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (12): 3723-3732.DOI: 10.11772/j.issn.1001-9081.2021101802
所属专题: 人工智能
冯号1, 黄朝兵1( ), 文元桥2
), 文元桥2
收稿日期:2021-10-22
修回日期:2022-01-10
接受日期:2022-01-14
发布日期:2022-01-19
出版日期:2022-12-10
通讯作者:
黄朝兵
作者简介:冯号(1996—),男,重庆人,硕士研究生,主要研究方向:信息处理、图像处理与识别基金资助:
Hao FENG1, Chaobing HUANG1(), Yuanqiao WEN2
Received:2021-10-22
Revised:2022-01-10
Accepted:2022-01-14
Online:2022-01-19
Published:2022-12-10
Contact:
Chaobing HUANG
About author:FENG Hao, born in 1996, M. S. candidate. His research interests include information processing, image processing and recognition.Supported by:摘要:
YOLOv3算法被广泛地应用于目标检测任务。虽然在YOLOv3基础上改进的一些算法取得了一定的成果,但是仍存在表征能力不足且检测精度不高的问题,尤其对小目标的检测还不能满足需求。针对上述问题,提出了一种改进YOLOv3的遥感图像小目标检测算法。首先,使用K均值聚类变换(K-means-T)算法优化锚框的大小,从而提升先验框和真实框之间的匹配度;其次,优化置信度损失函数,以解决难易样本分布不均衡的问题;最后,引入注意力机制来提高算法对细节信息的感知能力。在RSOD数据集上进行实验的结果显示,与原始的YOLOv3算法、YOLOv4算法相比,所提算法在小目标“飞机(aircraft)”类上的平均精确率(AP)分别提高了7.3个百分点和5.9个百分点。这表明所提算法能够有效检测遥感图像小目标,具有更高的准确率。
中图分类号:
冯号, 黄朝兵, 文元桥. 基于改进YOLOv3的遥感图像小目标检测[J]. 计算机应用, 2022, 42(12): 3723-3732.
Hao FENG, Chaobing HUANG, Yuanqiao WEN. Remote sensing image small target detection based on improved YOLOv3[J]. Journal of Computer Applications, 2022, 42(12): 3723-3732.

图1 YOLOv3的模型结构
Fig. 1 Model structure of YOLOv3

图2 多尺度训练中的Anchor
Fig. 2 Anchor in multi-scale training
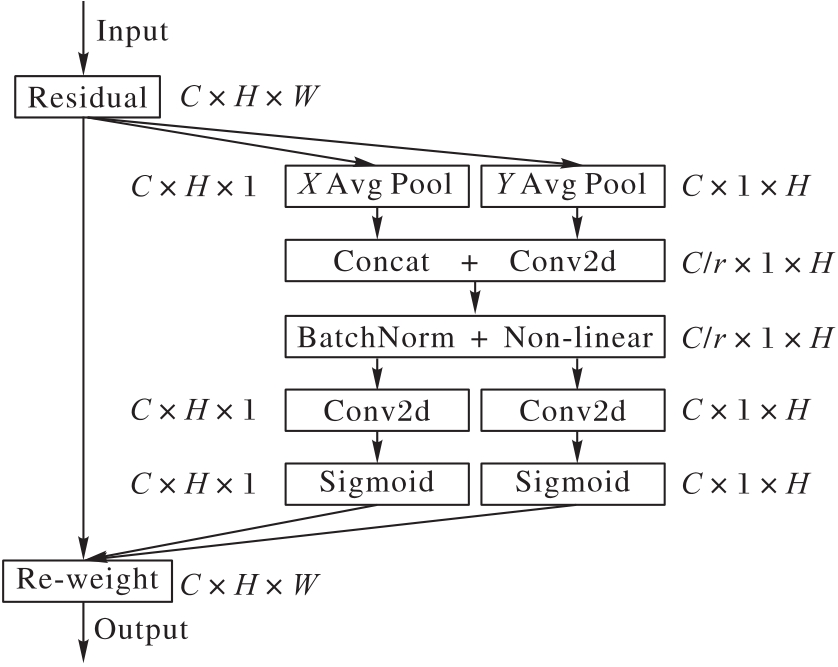
图3 CA模块
Fig.3 CA module

图4 RSOD数据集样例
Fig. 4 Samples of RSOD dataset

图5 RSOD数据集上不同类的目标标注框占原图面积的比例分布
Fig. 5 Proportion distribution of area of labeled box to the original image for different classes on RSOD dataset

图6 RSOD数据集中目标占原图大小的比例分布
Fig.6 Distribution of proportion of target size to original image in RSOD dataset

图7 YOLOv3-AKT的模型结构
Fig. 7 Model structure of YOLOv3-AKT

图8 不同算法的检测精度比较
Fig.8 Detection accuracy comparison of different algorithms
| 算法 | mAP@0.5 | F1 | AP(aircraft) | F1(aircraft) |
|---|---|---|---|---|
| YOLOv3 | 0.833 | 0.825 | 0.850 | 0.850 |
| YOLOv4[ | 0.862 | 0.835 | 0.864 | 0.840 |
| EfficientDet[ | 0.881 | 0.858 | 0.603 | 0.620 |
| 文献[ | 0.903 | 0.865 | — | — |
| YOLOv3[ | 0.827 | 0.835 | 0.833 | 0.830 |
| YOLOv3-AKT | 0.903 | 0.870 | 0.923 | 0.900 |
表1 不同算法的检测精度比较
Tab.1 Comparison of detection accuracy among different algorithms
| 算法 | mAP@0.5 | F1 | AP(aircraft) | F1(aircraft) |
|---|---|---|---|---|
| YOLOv3 | 0.833 | 0.825 | 0.850 | 0.850 |
| YOLOv4[ | 0.862 | 0.835 | 0.864 | 0.840 |
| EfficientDet[ | 0.881 | 0.858 | 0.603 | 0.620 |
| 文献[ | 0.903 | 0.865 | — | — |
| YOLOv3[ | 0.827 | 0.835 | 0.833 | 0.830 |
| YOLOv3-AKT | 0.903 | 0.870 | 0.923 | 0.900 |

图9 不同算法的预测结果对比
Fig. 9 Comparison of prediction results of different algorithms

图10 困难样本损失占总置信度损失的比例
Fig. 10 Proportion of loss of hard samples to total confidence loss
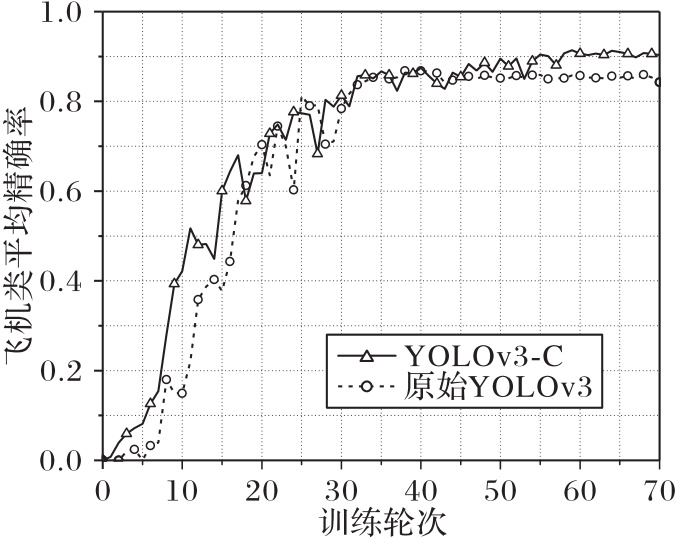
图11 原始YOLOv3和 YOLOv3-C的AP对比
Fig. 11 AP comparison of original YOLOv3 and YOLOv3-C
| 特征图 | 52×52 | 26×26 | 13×13 |
|---|---|---|---|
| Anchor[ | (8,8),(11,12),(15,14) | (18,19),(23,24),(30,32) | (40,44),(51,58),(145,178) |
| Anchor-T(c=1) | (8,8),(14,15),(22,20) | (28,30),(38,40),(53,56) | (73,81),(96,109),(290,356) |
| Anchor-T(c=3) | (4,4),(8,9),(15,14) | (21,22),(31,33),(46,49) | (67,74),(91,103),(290,356) |
| Anchor-T(c=5) | (4,4),(7,8),(12,12) | (16,17),(23,24),(38,40) | (60,66),(84,95),(290,356) |
| Anchor-T(c=7) | (4,4),(7,8),(11,11) | (15,16),(20,21),(28,30) | (40,44),(66,75),(290,356) |
| Anchor-T (c=9) | (4,4),(7,7),(11,10) | (14,15),(19,20),(26,28) | (36,40),(48,54),(290,356) |
| Anchor[ | (4,4),(10,11),(18,17) | (24,26),(35,36),(49,53) | (70,77),(93,106),(290,356) |
表2 不同中心框下的锚框
Tab. 2 Anchor boxes under different center anchor boxes
| 特征图 | 52×52 | 26×26 | 13×13 |
|---|---|---|---|
| Anchor[ | (8,8),(11,12),(15,14) | (18,19),(23,24),(30,32) | (40,44),(51,58),(145,178) |
| Anchor-T(c=1) | (8,8),(14,15),(22,20) | (28,30),(38,40),(53,56) | (73,81),(96,109),(290,356) |
| Anchor-T(c=3) | (4,4),(8,9),(15,14) | (21,22),(31,33),(46,49) | (67,74),(91,103),(290,356) |
| Anchor-T(c=5) | (4,4),(7,8),(12,12) | (16,17),(23,24),(38,40) | (60,66),(84,95),(290,356) |
| Anchor-T(c=7) | (4,4),(7,8),(11,11) | (15,16),(20,21),(28,30) | (40,44),(66,75),(290,356) |
| Anchor-T (c=9) | (4,4),(7,7),(11,10) | (14,15),(19,20),(26,28) | (36,40),(48,54),(290,356) |
| Anchor[ | (4,4),(10,11),(18,17) | (24,26),(35,36),(49,53) | (70,77),(93,106),(290,356) |

图12 K-means-T取不同中心框时AP(aircraft)的比较
Fig. 12 Comparison of AP(aircraft) when K-means-T taking different center anchor boxes

图13 不同算法下YOLOv3的平均损失
Fig. 13 Average losses of YOLOv3 using different algorithms
| 算法 | mAP@0.5 | F1 | AP(aircraft) |
|---|---|---|---|
| 原始YOLOv3 | 0.840 | 0.850 | 0.852 |
| YOLOv3[ | 0.827 | 0.835 | 0.833 |
| YOLOv3[ | 0.853 | 0.855 | 0.870 |
| YOLOv3-T | 0.868 | 0.860 | 0.884 |
表3 不同锚框优化算法的精度比较
Tab. 3 Accuracy comparison of different anchor box optimization algorithms
| 算法 | mAP@0.5 | F1 | AP(aircraft) |
|---|---|---|---|
| 原始YOLOv3 | 0.840 | 0.850 | 0.852 |
| YOLOv3[ | 0.827 | 0.835 | 0.833 |
| YOLOv3[ | 0.853 | 0.855 | 0.870 |
| YOLOv3-T | 0.868 | 0.860 | 0.884 |

图14 优化Anchor前后的YOLOv3 在数据集各类目标上的精度
Fig.14 Accuracy of YOLOv3 before and after optimizing Anchor on different classes of targets in dataset
| CA模块位置 | mAP@0.5 | AP(aircraft) | F1(aircraft) |
|---|---|---|---|
| YOLOv3 | 0.840 | 0.850 | 0.850 |
| 检测头1 | 0.849 | 0.882 | 0.860 |
| 检测头2 | 0.846 | 0.884 | 0.860 |
| 检测头3 | 0.869 | 0.901 | 0.880 |
表4 不同位置插入CA的精度比较
Tab. 4 Accuracy comparison of CA inserting in different positions
| CA模块位置 | mAP@0.5 | AP(aircraft) | F1(aircraft) |
|---|---|---|---|
| YOLOv3 | 0.840 | 0.850 | 0.850 |
| 检测头1 | 0.849 | 0.882 | 0.860 |
| 检测头2 | 0.846 | 0.884 | 0.860 |
| 检测头3 | 0.869 | 0.901 | 0.880 |

图15 引入CA前后的YOLOv3在数据集各类目标上的AP
Fig.15 AP of YOLOv3 before and after introducing CA on different classes of targets in dataset
| 1 | LONG J, SHELHAMER E, DARRELL T. Fully convolutional networks for semantic segmentation[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 3431-3440. 10.1109/cvpr.2015.7298965 |
| 2 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. 10.1109/cvpr.2014.81 |
| 3 | GIRSHICK R. Fast R-CNN[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1440-1448. 10.1109/iccv.2015.169 |
| 4 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. 10.1109/cvpr.2016.91 |
| 5 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:6517-6525. 10.1109/cvpr.2017.690 |
| 6 | REDMON J, FARHADI A. YOLOv3: an incremental improvement[EB/OL]. (2018-04-08) [2021-09-10].. 10.1109/cvpr.2017.690 |
| 7 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection[EB/OL]. (2020-04-23) [2021-09-14].. |
| 8 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(2): 318-327. 10.1109/tpami.2018.2858826 |
| 9 | WANG F L, SU J Y. Based on the improved YOLOV3 small target detection algorithm[C]// Proceedings of the IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference. Piscataway: IEEE, 2021: 2155-2159. 10.1109/imcec51613.2021.9482076 |
| 10 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. 10.1109/cvpr.2017.106 |
| 11 | KISANTAL M, WOJNA Z, MURAWSKI J, et al. Augmentation for small object detection[EB/OL]. (2019-02-19) [2021-08-15].. 10.5121/csit.2019.91713 |
| 12 | LIU S T, HUANG D, WANG Y H. Receptive field block net for accurate and fast object detection[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11215. Cham: Springer, 2018: 404-419. |
| 13 | 邵慧翔,曾丹. 基于改进YOLOv3算法的水下小目标分类与识别[J]. 上海大学学报(自然科学版), 2021, 27(3):481-491. 10.12066/j.issn.1007-2861.2279 |
| SHAO H X, ZENG D. Classification and recognition of underwater small targets based on improved YOLOv3 algorithm[J]. Journal of Shanghai University (Natural Science Edition), 2021, 27(3):481-491. 10.12066/j.issn.1007-2861.2279 | |
| 14 | 于洋,李世杰,陈亮,等. 基于改进 YOLO v2 的船舶目标检测方法[J]. 计算机科学, 2019, 46(8): 332-336. |
| YU Y, LI S J, CHEN L, et al. Ship target detection based on improved YOLO v2[J]. Computer Science, 2019, 46(8): 332-336. | |
| 15 | YE K Q, FANG Z B, HUANG X J, et al. Research on small target detection algorithm based on improved YOLOv3[C]// Proceedings of the 5th International Conference on Mechanical, Control and Computer Engineering. Piscataway: IEEE, 2020: 1467-1470. 10.1109/icmcce51767.2020.00321 |
| 16 | REZAEE M, ZHANG Y, MISHRA R, et al. Using a VGG-16 network for individual tree species detection with an object-based approach[C]// Proceedings of the 10th IAPR Workshop on Pattern Recognition in Remote Sensing. Piscataway: IEEE, 2018: 1-7. 10.1109/prrs.2018.8486395 |
| 17 | LI B Q, HE Y Y. An improved ResNet based on the adjustable shortcut connections[J]. IEEE Access, 2018, 6:18967-18974. 10.1109/access.2018.2814605 |
| 18 | TAN M X, PANG R M, LE Q V. EfficientDet: scalable and efficient object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10778-10787. 10.1109/cvpr42600.2020.01079 |
| 19 | 王建军,魏江,梅少辉,等. 面向遥感图像小目标检测的改进YOLOv3算法[J]. 计算机工程与应用, 2021, 57(20): 133-141. |
| WANG J J, WEI J, MEI S H, et al. Improved YOLOv3 for small target detection in remote sensing images[J]. Computer Engineering and Applications, 2021, 57(20): 133-141. |
| [1] | 秦璟, 秦志光, 李发礼, 彭悦恒. 基于概率稀疏自注意力神经网络的重性抑郁疾患诊断[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2970-2974. |
| [2] | 李力铤, 华蓓, 贺若舟, 徐况. 基于解耦注意力机制的多变量时序预测模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2732-2738. |
| [3] | 赵志强, 马培红, 黑新宏. 基于双重注意力机制的人群计数方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2886-2892. |
| [4] | 薛凯鹏, 徐涛, 廖春节. 融合自监督和多层交叉注意力的多模态情感分析网络[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2387-2392. |
| [5] | 汪雨晴, 朱广丽, 段文杰, 李书羽, 周若彤. 基于交互注意力机制的心理咨询文本情感分类模型[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2393-2399. |
| [6] | 高鹏淇, 黄鹤鸣, 樊永红. 融合坐标与多头注意力机制的交互语音情感识别[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2400-2406. |
| [7] | 李钟华, 白云起, 王雪津, 黄雷雷, 林初俊, 廖诗宇. 基于图像增强的低照度人脸检测[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2588-2594. |
| [8] | 莫尚斌, 王文君, 董凌, 高盛祥, 余正涛. 基于多路信息聚合协同解码的单通道语音增强[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2611-2617. |
| [9] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [10] | 刘丽, 侯海金, 王安红, 张涛. 基于多尺度注意力的生成式信息隐藏算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2102-2109. |
| [11] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [12] | 李大海, 王忠华, 王振东. 结合空间域和频域信息的双分支低光照图像增强网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2175-2182. |
| [13] | 魏文亮, 王阳萍, 岳彪, 王安政, 张哲. 基于光照权重分配和注意力的红外与可见光图像融合深度学习模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2183-2191. |
| [14] | 熊武, 曹从军, 宋雪芳, 邵云龙, 王旭升. 基于多尺度混合域注意力机制的笔迹鉴别方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2225-2232. |
| [15] | 姬张建, 杜娜. 基于改进VariFocalNet的微小目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2200-2207. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||