


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (3): 962-971.DOI: 10.11772/j.issn.1001-9081.2022010037
所属专题: 前沿与综合应用
范贤博俊1, 陈立家1( ), 李珅2, 王晨露1, 王敏1, 王赞1, 刘名果1
), 李珅2, 王晨露1, 王敏1, 王赞1, 刘名果1
收稿日期:2022-01-13
修回日期:2022-03-14
接受日期:2022-03-22
发布日期:2022-04-14
出版日期:2023-03-10
通讯作者:
陈立家
作者简介:范贤博俊(1994—),男,河南义马人,硕士研究生,主要研究方向:群智能算法基金资助:
Xianbojun FAN1, Lijia CHEN1(), Shen LI2, Chenlu WANG1, Min WANG1, Zan WANG1, Mingguo LIU1
Received:2022-01-13
Revised:2022-03-14
Accepted:2022-03-22
Online:2022-04-14
Published:2023-03-10
Contact:
Lijia CHEN
About author:FAN Xianbojun, born in 1994, M. S. candidate. His research interests include swarm intelligence algorithm.Supported by:摘要:
针对视觉机械臂在复杂系统环境下整体精度不高、不易部署、校准成本高的问题,提出一种鲁棒的视觉机械臂联合建模优化方法。首先,对视觉机械臂的各个子系统模型进行集成,在机械臂的工作空间随机采集伺服电机转角、机械臂末端坐标等数据。其次,提出一种具有分层优化机制的自适应多精英引导复合差分进化算法(AMECoDEs-LO),使用参数辨识的方法同时优化联合系统参数。AMECoDEs-LO对种群中阶段性的数据进行主成分分析(PCA),以参数降维的思想实现对收敛精度和速度的隐式引导。实验结果表明,在AMECoDEs-LO和联合系统模型的作用下,视觉机械臂在校准过程中不需要额外的仪器,部署速度快,最终精度相较于传统方法提高60%;在机械臂连杆受损、伺服电机精度降低、相机定位噪声增大的情况下,系统仍然保持较高精度,验证了所提方法的鲁棒性。
中图分类号:
范贤博俊, 陈立家, 李珅, 王晨露, 王敏, 王赞, 刘名果. 鲁棒的视觉机械臂联合建模优化方法[J]. 计算机应用, 2023, 43(3): 962-971.
Xianbojun FAN, Lijia CHEN, Shen LI, Chenlu WANG, Min WANG, Zan WANG, Mingguo LIU. Robust joint modeling and optimization method for visual manipulators[J]. Journal of Computer Applications, 2023, 43(3): 962-971.
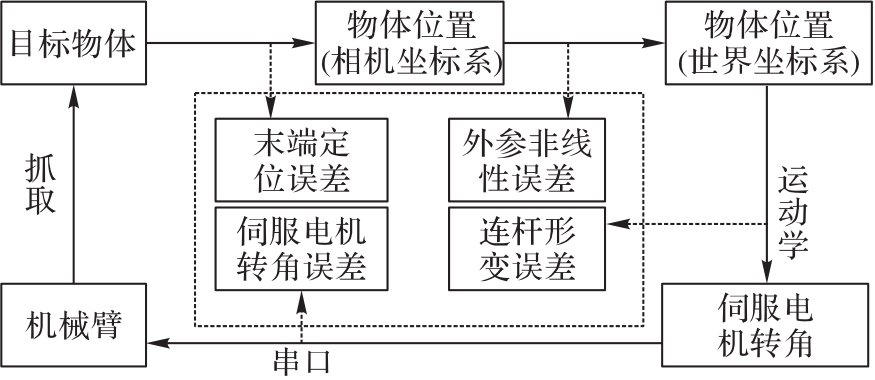
图1 视觉机械臂系统抓取流程
Fig.1 Grab process of visual manipulator system
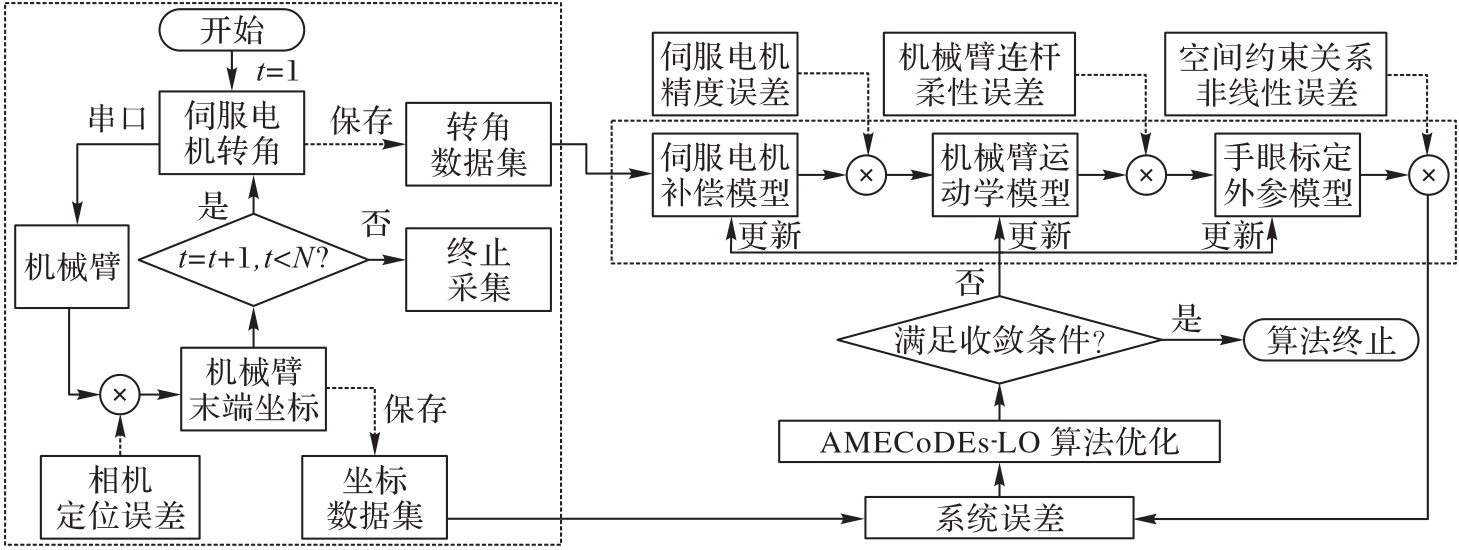
图2 系统整体优化策略
Fig.2 Overall system optimization strategy
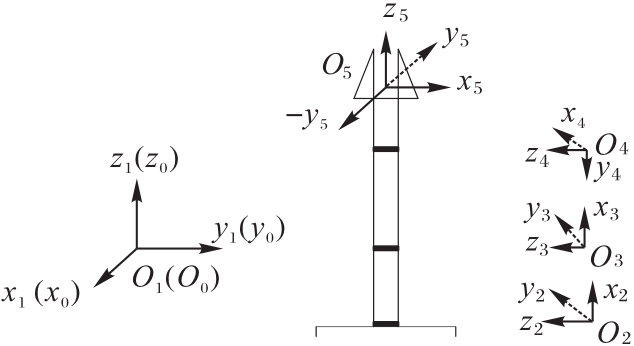
图3 关节坐标系
Fig.3 Joint coordinate system

图4 AMECoDEs-LO个体编码结构
Fig.4 Individual coding structure of AMECoDEs-LO

图5 三种优化状态的切换
Fig.5 Switching between three optimization states
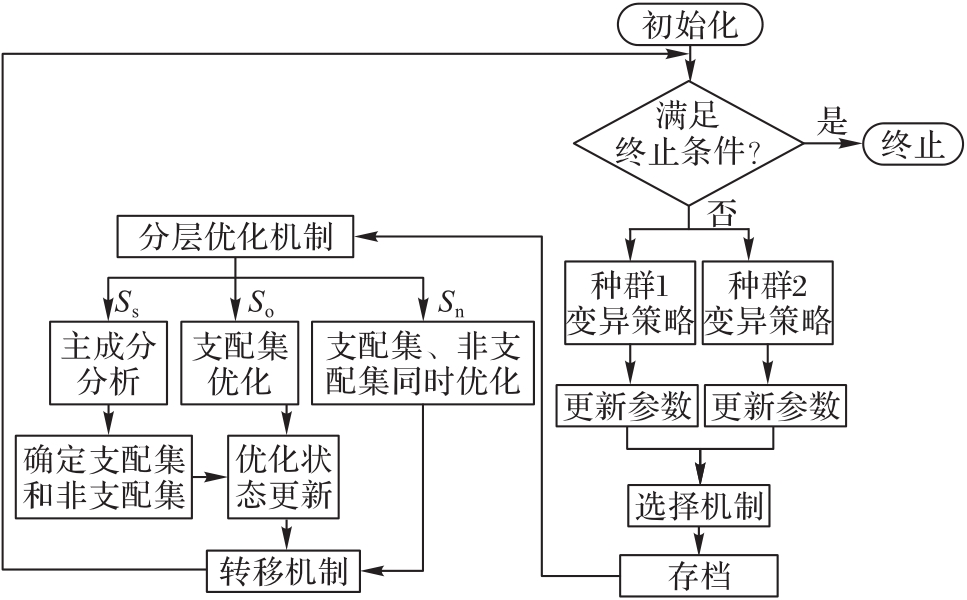
图6 AMECoDEs-LO流程
Fig.6 Flowchart of AMECoDEs-LO
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
表1 5种个体配置
Tab.1 Five individual configurations
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
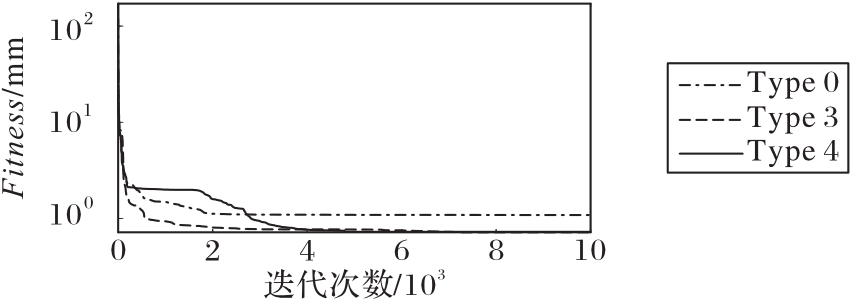
图7 正常机械臂环境下的3种个体配置的收敛情况
Fig.7 Convergence of three individual configurations under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
表2 正常机械臂环境下的个体配置情况
Tab.2 Individual configuration under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
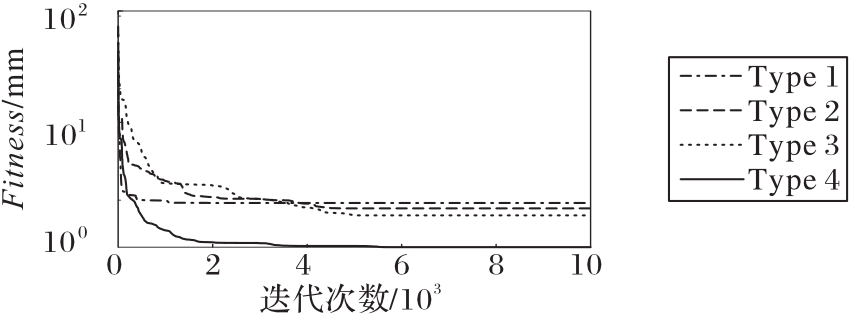
图8 受损机械臂环境下的4种个体配置的收敛情况
Fig.8 Convergence of four individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
表3 受损机械臂环境下的个体配置情况
Tab.3 Individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
表4 两种参数的不同组合情况
Tab.4 Different combinations of two parameters
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
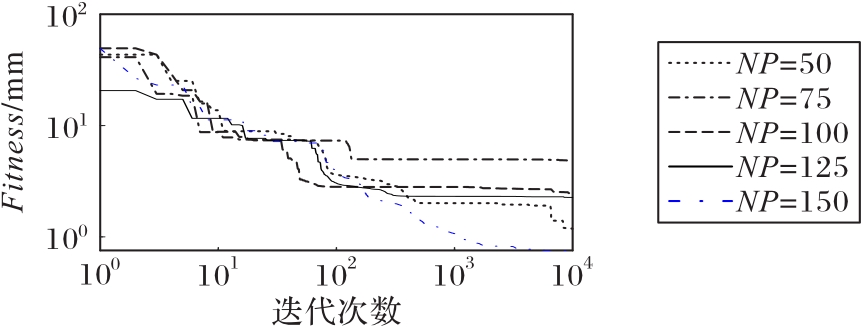
图9 不同种群规模下适应度的比较
Fig.9 Comparison of fitness in populations with different scales

图10 AMECoDEs-LO的性能
Fig.10 Performance of AMECoDEs-LO
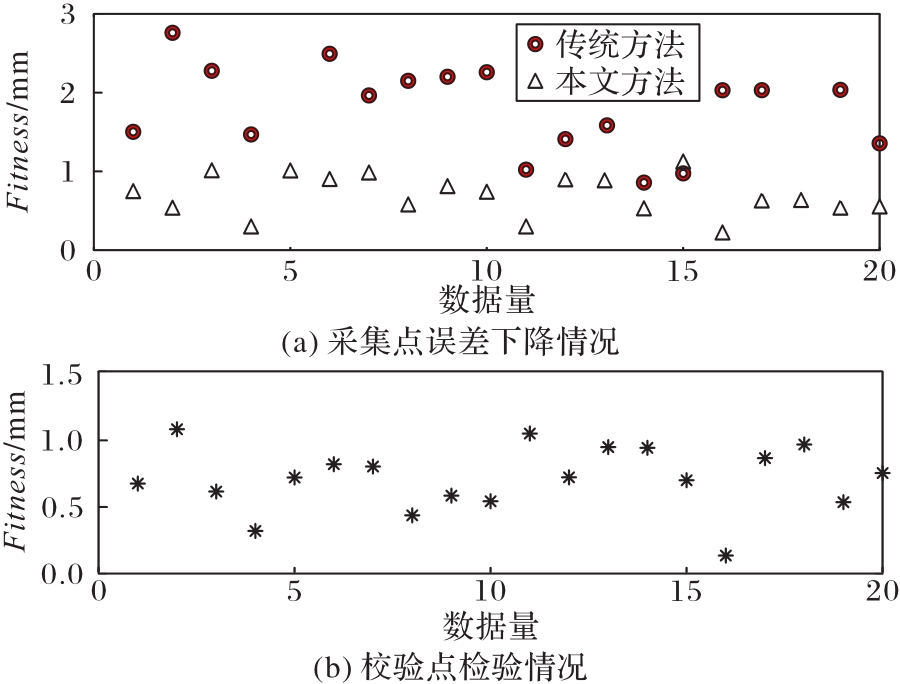
图11 联合系统和传统方法精度验证对比
Fig.11 Accuracy verification comparison between joint system and traditional method

图12 伺服电机软补偿的性能
Fig.12 Performance of servo motor soft compensation
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |
表5 三种方案在不同指标上的结果 (°)
Tab.5 Results of three schemes on different indexes
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |

图13 四种不同的数据采集区域
Fig.13 Four different data collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
表6 四种采集区域下两种机械臂在七种算法下的Fitness比较
Tab.6 Fitness comparison of two manipulators under seven algorithms in four collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
表7 系统的收敛和校验结果 (mm)
Tab.7 Convergence and verification results of system
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
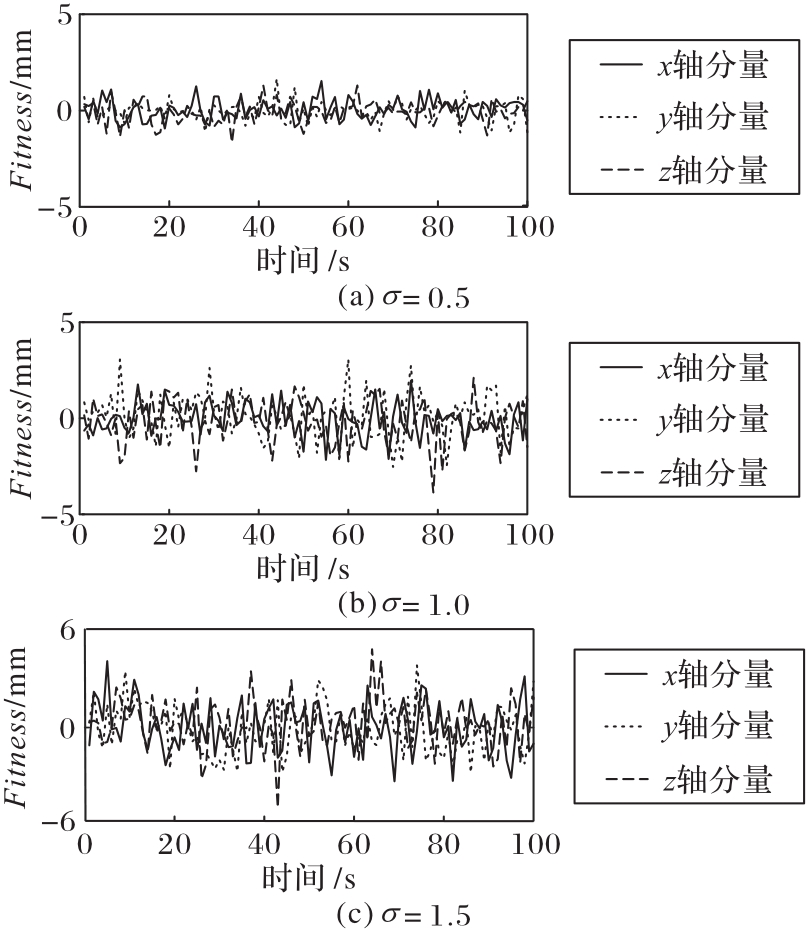
图14 三种不同强度的高斯白噪声
Fig.14 Three Gaussian white noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |
表8 加入不同强度噪声后系统模型的Fitness ( 单位:mm)
Tab.8 Fitness of system model after adding noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |

图15 不同强度噪声下AMECoDEs-LO的收敛情况
Fig.15 Convergence of AMECoDEs-LO under noise with different intensities
| 1 | WEN B, TAO B, LI G F. Research status and tendency of intelligent industrial robot [J]. Journal of Physics: Conference Series, 2019, 1302(3): No.032050. 10.1088/1742-6596/1302/3/032050 |
| 2 | LEVINE S, PASTOR P, KRIZHEVSKY A, et al. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection [J]. The International Journal of Robotics Research, 2018, 37(4/5): 421-436. 10.1177/0278364917710318 |
| 3 | LI Q W, WANG Z Q, SHEN C W, et al. Method for horizontal alignment deviation measurement using binocular camera without common target [J]. IEEE Access, 2020, 8: 184540-184549. 10.1109/access.2020.3029593 |
| 4 | HAN Y, CHU Z N, ZHAO K. Target positioning method in binocular vision manipulator control based on improved Canny operator [J]. Multimeia Tools and Application, 2020, 79: 9599-9614. 10.1007/s11042-019-08140-9 |
| 5 | XIAO P F, JU H H, LI Q D, et al. A new fixed axis-invariant based calibration approach to improve absolute positioning accuracy of manipulators [J]. IEEE Access, 2020, 8: 134224-134232. 10.1109/ACCESS.2020.3011328 |
| 6 | LV Y F, NA J, YANG Q M, et al. Online adaptive optimal control for continuous-time nonlinear systems with completely unknown dynamics [J]. International Journal of Control, 2016, 89(1): 99-112. 10.1080/00207179.2015.1060362 |
| 7 | WANG K S. Application of genetic algorithms to robot kinematics calibration [J]. International Journal of Systems Science, 2009, 40(2): 147-153. 10.1080/00207720802630644 |
| 8 | XU X H, ZHU D H, ZHANG H Y, et al. TCP-based calibration in robot-assisted belt grinding of aero-engine blades using scanner measurements [J]. The International Journal of Advanced Manufacturing Technology, 2017, 90(1/2/3/4): 635-647. 10.1007/s00170-016-9331-8 |
| 9 | 吴庆华, 万偲, 李子奇,等. 机器人线结构光视觉引导系统的手眼标定方法[J]. 制造业自动化, 2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 |
| WU Q H, WAN C, LI Z Q, et al. Hand eye calibration method of robot line structured light vision guidance system [J]. Manufacturing Automation,2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 | |
| 10 | HUA J, ZENG L C. Hand-eye calibration algorithm based on an optimized neural network [J]. Actuators, 2021, 10(4): No.85. 10.3390/act10040085 |
| 11 | BAI J, ZHANG Y C, QIN X S, et al. Hybrid calibration and detection approach for mobile robotic manufacturing systems [J]. Industrial Robot, 2020, 47(4): 511-519. 10.1108/ir-09-2019-0194 |
| 12 | WANG H X, LU X, HU Z Y, et al. A vision-based fully-automatic calibration method for hand-eye serial robot [J]. Industrial Robot, 2015, 42(1): 64-73. 10.1108/ir-06-2014-0352 |
| 13 | MISEIKIS J, GLETTE K, ELLE O J, et al. Automatic calibration of a robot manipulator and multi 3D camera system [C]// Proceedings of the 2016 IEEE/SICE International Symposium on System Integration. Piscataway: IEEE, 2016: 735-741. 10.1109/sii.2016.7844087 |
| 14 | YIN S B, REN Y J, ZHU J G, et al. A vision-based self-calibration method for robotic visual inspection systems [J]. Sensors, 2013, 13(12): 16565-16582. 10.3390/s131216565 |
| 15 | YANG C G, JIANG Y M, HE W, et al. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence [J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8112-8123. 10.1109/tie.2018.2803773 |
| 16 | CUI L Z, LI G H, ZHU Z X, et al. Adaptive multiple-elites-guided composite differential evolution algorithm with a shift mechanism [J]. Information Sciences, 2018, 422: 122-143. 10.1016/j.ins.2017.09.002 |
| 17 | DENG W, SHANG S F, CAI X, et al. Quantum differential evolution with cooperative coevolution framework and hybrid mutation strategy for large scale optimization [J]. Knowledge-Based Systems, 2021, 224: No.107080. 10.1016/j.knosys.2021.107080 |
| 18 | AHN M S, CHAE H, NOH D, et al. Analysis and noise modeling of the Intel RealSense D435 for mobile robots [C]// Proceedings of the 2019 16th International Conference on Ubiquitous Robots . Piscataway: IEEE, 2019: 707-711. 10.1109/urai.2019.8768489 |
| 19 | ZHANG Z Y. A flexible new technique for camera calibration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. 10.1109/34.888718 |
| 20 | TONG L Y, DONG M G, JING C. An improved multi-population ensemble differential evolution [J]. Neurocomputing, 2018, 290: 130-147. 10.1016/j.neucom.2018.02.038 |
| 21 | GUO S M, YANG C C, HSU P H, et al. Improving differential evolution with a successful-parent-selecting framework [J]. IEEE Transactions on Evolutionary Computation, 2015, 19(5): 717-730. 10.1109/tevc.2014.2375933 |
| [1] | 葛焌迟, 赵为华. 矩阵数据基于鲁棒主成分分析的距离加权判别分析[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2073-2079. |
| [2] | 陈学斌, 任志强, 张宏扬. 联邦学习中的安全威胁与防御措施综述[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1663-1672. |
| [3] | 董炜娜, 刘佳, 潘晓中, 陈立峰, 孙文权. 基于编码-解码网络的大容量鲁棒图像隐写方案[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 772-779. |
| [4] | 黄杰, 武瑞梓, 李均利. 高效的自适应复杂网络鲁棒性优化算法[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3530-3539. |
| [5] | 汪韩, 万源, 王东, 丁义明. 宽度学习系统中鲁棒性权值矩阵组合的筛选方法[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3032-3038. |
| [6] | 赵徐炎, 崔允贺, 蒋朝惠, 钱清, 申国伟, 郭春, 李显超. CHAIN:基于重合支配的边缘计算节点放置算法[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2812-2818. |
| [7] | 葛孟婷, 万鸣华. 基于近邻监督局部不变鲁棒主成分分析的特征提取模型[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1013-1020. |
| [8] | 高健, 李智, 樊缤, 姜传贤. 基于光线投射采样和四元数正交矩的高效三维医学影像鲁棒零水印算法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1191-1197. |
| [9] | 孙梦迪, 孙忠贵, 孔旭, 韩红燕. 针对多模态图像的自适应引导形态学设计[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 560-566. |
| [10] | 孟昱煜, 郭静. 信息熵改进主成分分析模型的链路预测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(9): 2823-2829. |
| [11] | 李莉, 石可欣, 任振康. 基于特征选择和TrAdaBoost的跨项目缺陷预测方法[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1554-1562. |
| [12] | 柏财通, 崔翛龙, 郑会吉, 李爱. 基于自监督知识迁移的鲁棒性语音识别技术[J]. 《计算机应用》唯一官方网站, 2022, 42(10): 3217-3223. |
| [13] | 高工, 杨红雨, 刘洪. 基于深度学习的三维点云人脸识别[J]. 计算机应用, 2021, 41(9): 2736-2740. |
| [14] | 王心, 朱浩华, 刘光灿. 卷积鲁棒主成分分析[J]. 计算机应用, 2021, 41(5): 1314-1318. |
| [15] | 李华, 卢桂馥, 余沁茹. 基于干净数据的流形正则化非负矩阵分解[J]. 《计算机应用》唯一官方网站, 2021, 41(12): 3492-3498. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||