《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (6): 1959-1964.DOI: 10.11772/j.issn.1001-9081.2023050725
所属专题: 前沿与综合应用
葛超1, 张嘉滨1, 王蕾2( ), 伦志新2
), 伦志新2
Chao GE1, Jiabin ZHANG1, Lei WANG2(), Zhixin LUN2
摘要:
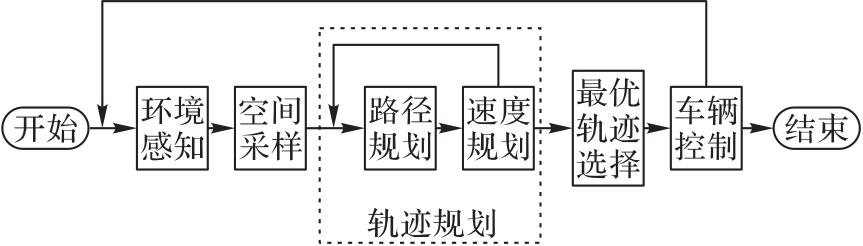
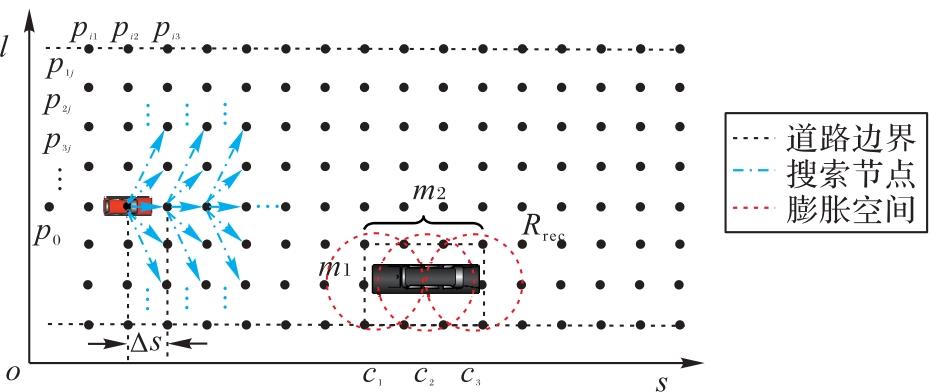
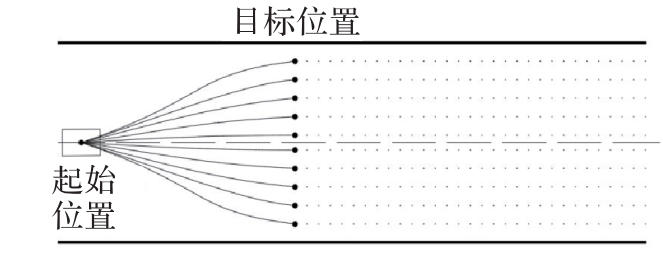
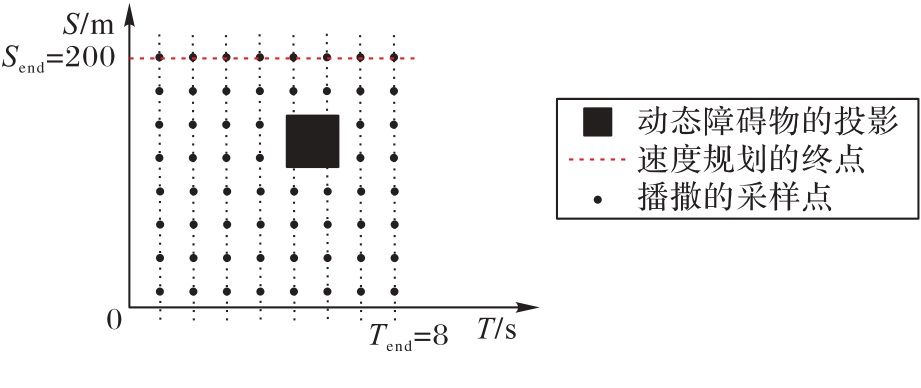
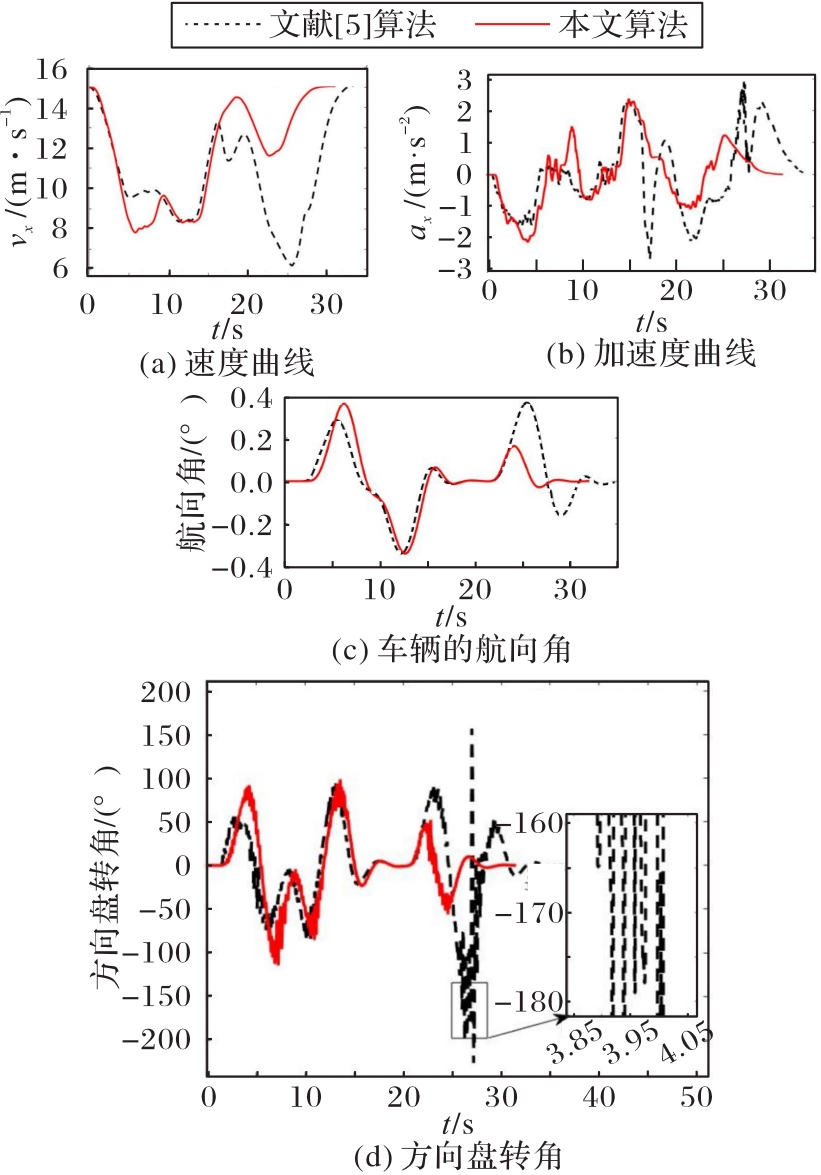
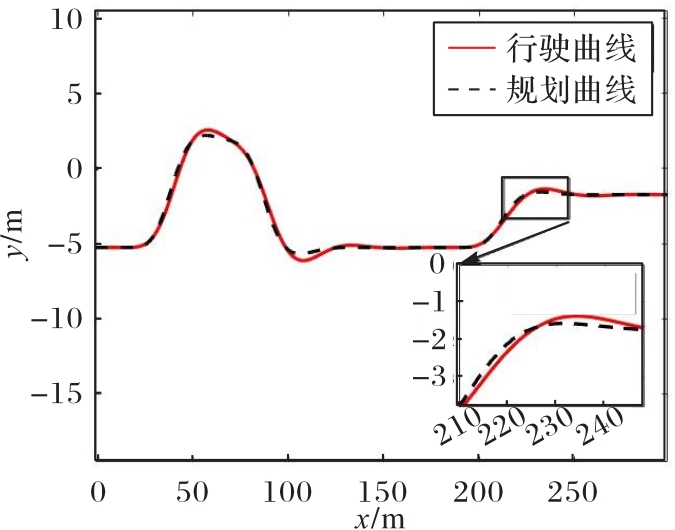
为帮助自动驾驶车辆规划一条安全、舒适和高效的行驶轨迹,提出一种基于模型预测控制的轨迹规划方法。首先,为简化规划的环境,提出一种安全、可行的“三圆”膨胀化的安全区,避免车辆理想化模型引发的碰撞问题;其次,将轨迹规划进行横、纵向空间解耦,横向规划使用模型预测的方法生成一系列满足行驶要求的候选轨迹,纵向规划使用动态规划方法,提高规划的效率;最后,综合考虑影响最优轨迹挑选的因素,提出更符合行驶要求的路径规划和速度规划的最优轨迹评价函数,并通过Matlab/Simulink、Prescan和Carsim软件的联合仿真验证所提算法的有效性。实验结果表明,车辆的舒适度指标、方向盘转角变化和定位精度等均达到预期效果,规划曲线与跟踪曲线完美贴合,验证了所提算法的优越性。
中图分类号: