


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (10): 3342-3352.DOI: 10.11772/j.issn.1001-9081.2024101511
• 前沿与综合应用 • 上一篇
张佳慧, 李晓明( ), 张嘉祥
), 张嘉祥
收稿日期:2024-10-24
修回日期:2025-01-07
接受日期:2025-01-10
发布日期:2025-01-15
出版日期:2025-10-10
通讯作者:
李晓明
作者简介:张佳慧(1999—),女,山西榆社人,硕士研究生,CCF会员,主要研究方向:计算机视觉、目标检测基金资助:
Jiahui ZHANG, Xiaoming LI(), Jiaxiang ZHANG
Received:2024-10-24
Revised:2025-01-07
Accepted:2025-01-10
Online:2025-01-15
Published:2025-10-10
Contact:
Xiaoming LI
About author:ZHANG Jiahui, born in 1999, M. S. candidate. Her research interests include computer vision, object detection.Supported by:摘要:
针对路面缺陷形态侧向狭窄、尺度多变和长程依赖特性导致检测精度低和漏检率高的问题,提出基于YOLOv8_n改进的强化形态感知的路面缺陷检测算法。首先,在主干网络融合阶段提出边缘增益聚焦模块(EEFM),采用条状池化核捕捉定向和位置感知信息并强化深层特征的边缘细节,增强细长特征的表达能力。其次,设计双链特征重分配金字塔网络(DCFRPN),重构融合方式,提供大范围感知和丰富定位信息的多尺度特征,提升对多尺度缺陷的融合能力。此外,构造形态感知任务交互检测头(MATIDH),增强分类与定位之间的任务交互,动态调整数据表征,融合多尺度带状卷积,优化细长缺陷的分类和回归。最后,提出PWIoU(Penalized Weighted Intersection over Union)损失函数,动态分配不同质量预测框的梯度增益,优化Box框的回归方式。实验结果表明,在RDD2022数据集上,所提算法的精确率和召回率相较于YOLOv8_n分别提升了3.5和2.3个百分点,在50%交并比(IoU)阈值下的平均精度均值(mAP)提升了3.2个百分点,验证了所提算法的有效性。
中图分类号:
张佳慧, 李晓明, 张嘉祥. 强化形态感知的路面缺陷检测算法[J]. 计算机应用, 2025, 45(10): 3342-3352.
Jiahui ZHANG, Xiaoming LI, Jiaxiang ZHANG. Pavement defect detection algorithm with enhanced morphological perception[J]. Journal of Computer Applications, 2025, 45(10): 3342-3352.

图1 改进YOLOv8_n的网络结构
Fig. 1 Network structure of improved YOLOv8_n

图2 EEFM的结构
Fig. 2 Structure of EEFM
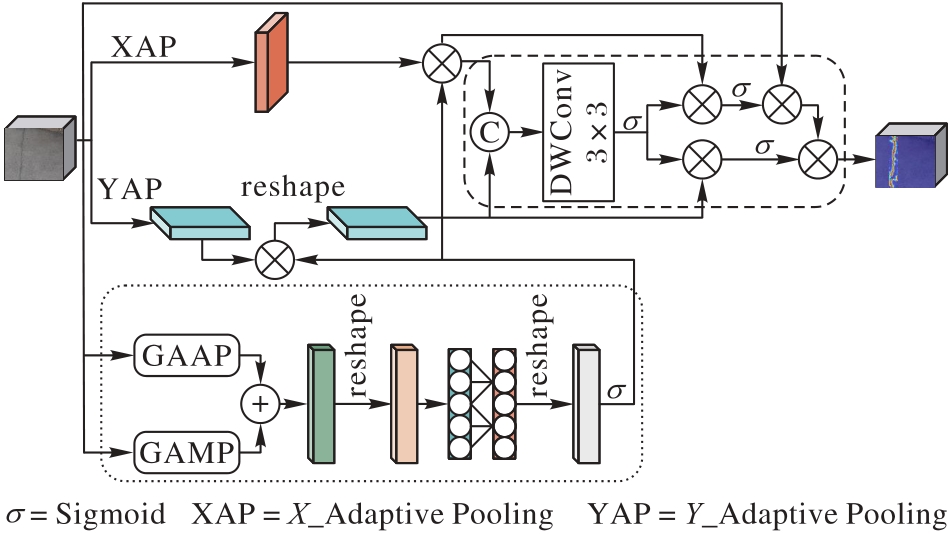
图3 MPCA的结构
Fig. 3 Structure of MPCA
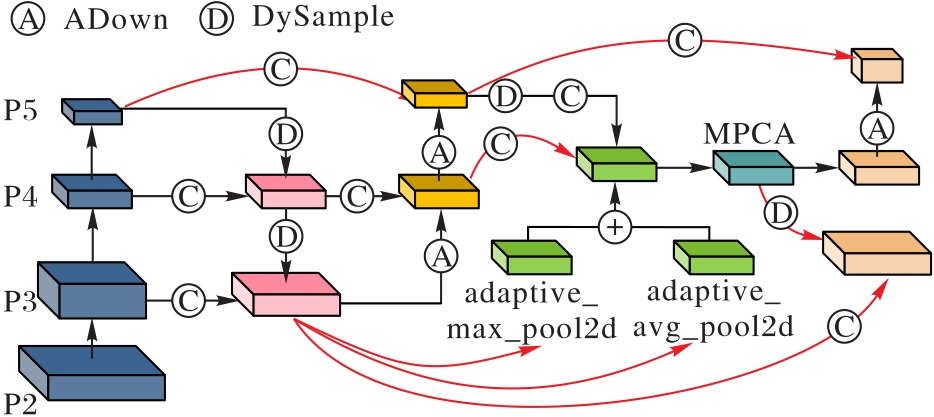
图4 DCFRPN的结构
Fig. 4 Structure of DCFRPN
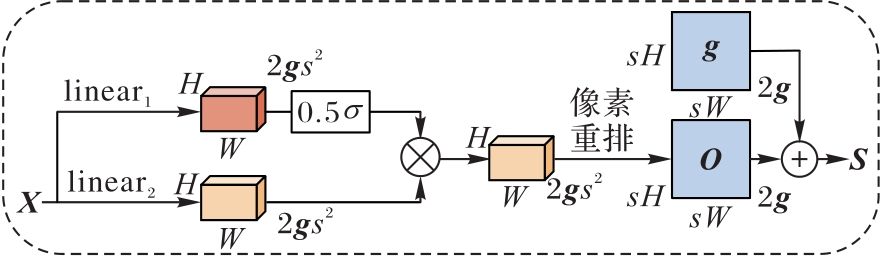
图5 DySample中的采样点生成器
Fig. 5 Sampling point generator in DySample
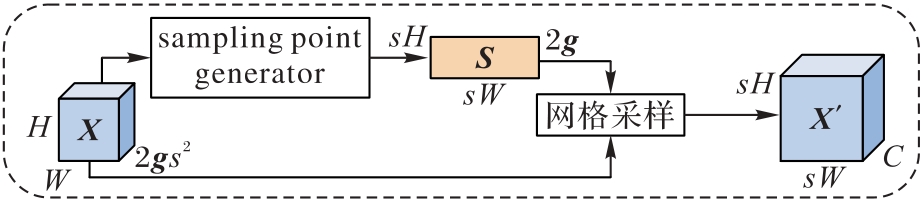
图6 DySample的结构
Fig. 6 Structure of DySample
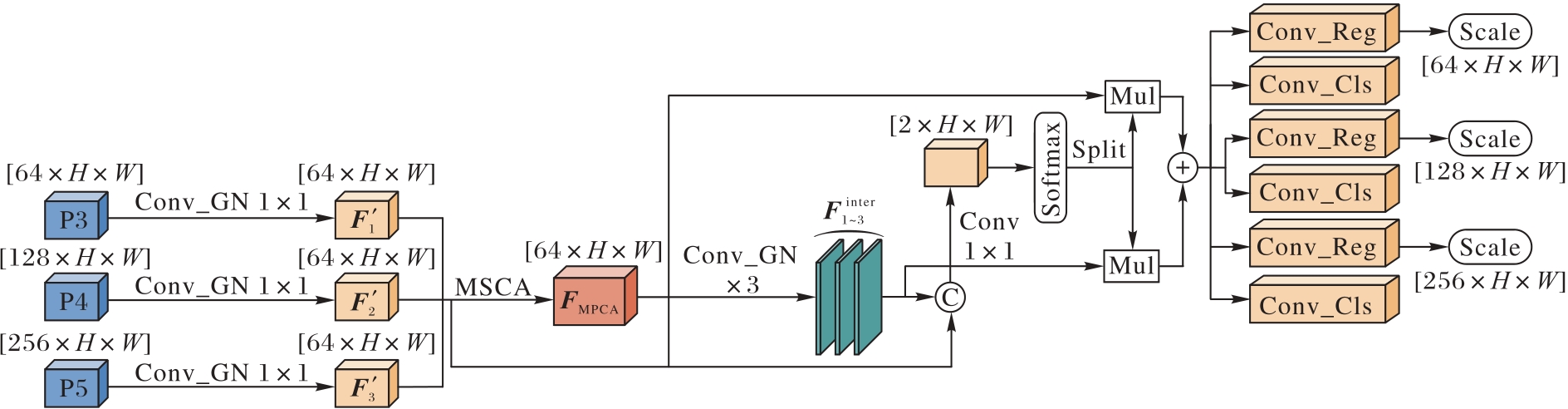
图7 MATIDH的结构
Fig. 7 Structure of MATIDH
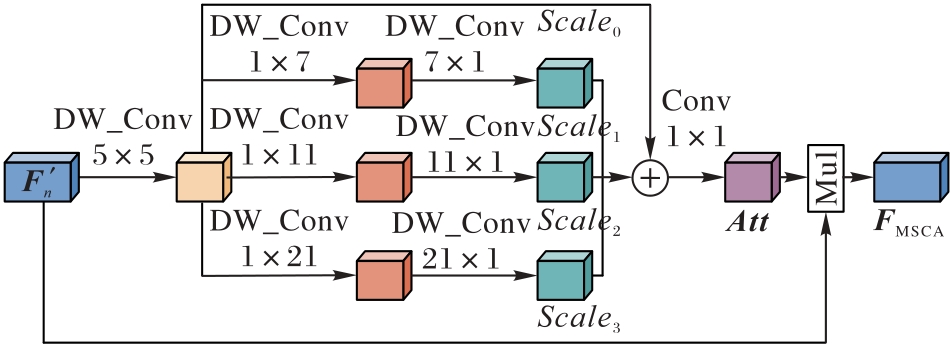
图8 MSCA的结构
Fig. 8 Structure of MSCA
注意力 机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| GAM | 60.3 | 58.5 | 58.1 | 30.3 | 5.28 |
| LSKA | 60.0 | 59.4 | 59.4 | 31.0 | 3.71 |
| DA | 56.8 | 57.1 | 57.5 | 28.3 | 3.91 |
| ConvFFN | 56.9 | 56.9 | 56.7 | 28.3 | 3.95 |
| AA | 57.4 | 57.4 | 57.7 | 28.6 | 3.98 |
| MPCA | 60.4 | 60.6 | 59.8 | 31.0 | 3.70 |
表1 EEFM中不同注意力机制的对比
Tab. 1 Comparison of different attention mechanisms in EEFM
注意力 机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| GAM | 60.3 | 58.5 | 58.1 | 30.3 | 5.28 |
| LSKA | 60.0 | 59.4 | 59.4 | 31.0 | 3.71 |
| DA | 56.8 | 57.1 | 57.5 | 28.3 | 3.91 |
| ConvFFN | 56.9 | 56.9 | 56.7 | 28.3 | 3.95 |
| AA | 57.4 | 57.4 | 57.7 | 28.6 | 3.98 |
| MPCA | 60.4 | 60.6 | 59.8 | 31.0 | 3.70 |
| 注意力机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| LSKA | 60.7 | 60.5 | 59.8 | 30.9 | 2.37 |
| ConvFFN | 56.2 | 56.8 | 56.9 | 28.2 | 2.39 |
| MSCA | 60.9 | 60.7 | 60.1 | 31.1 | 2.38 |
表2 MATIDH中不同注意力机制的对比
Tab. 2 Comparison of different attention mechanisms in MATIDH
| 注意力机制 | AP50 /% | mAP50 /% | mAP50:95 /% | Params/106 | |
|---|---|---|---|---|---|
| D00 | D10 | ||||
| Baseline | 59.2 | 59.9 | 58.9 | 30.3 | 3.01 |
| LSKA | 60.7 | 60.5 | 59.8 | 30.9 | 2.37 |
| ConvFFN | 56.2 | 56.8 | 56.9 | 28.2 | 2.39 |
| MSCA | 60.9 | 60.7 | 60.1 | 31.1 | 2.38 |
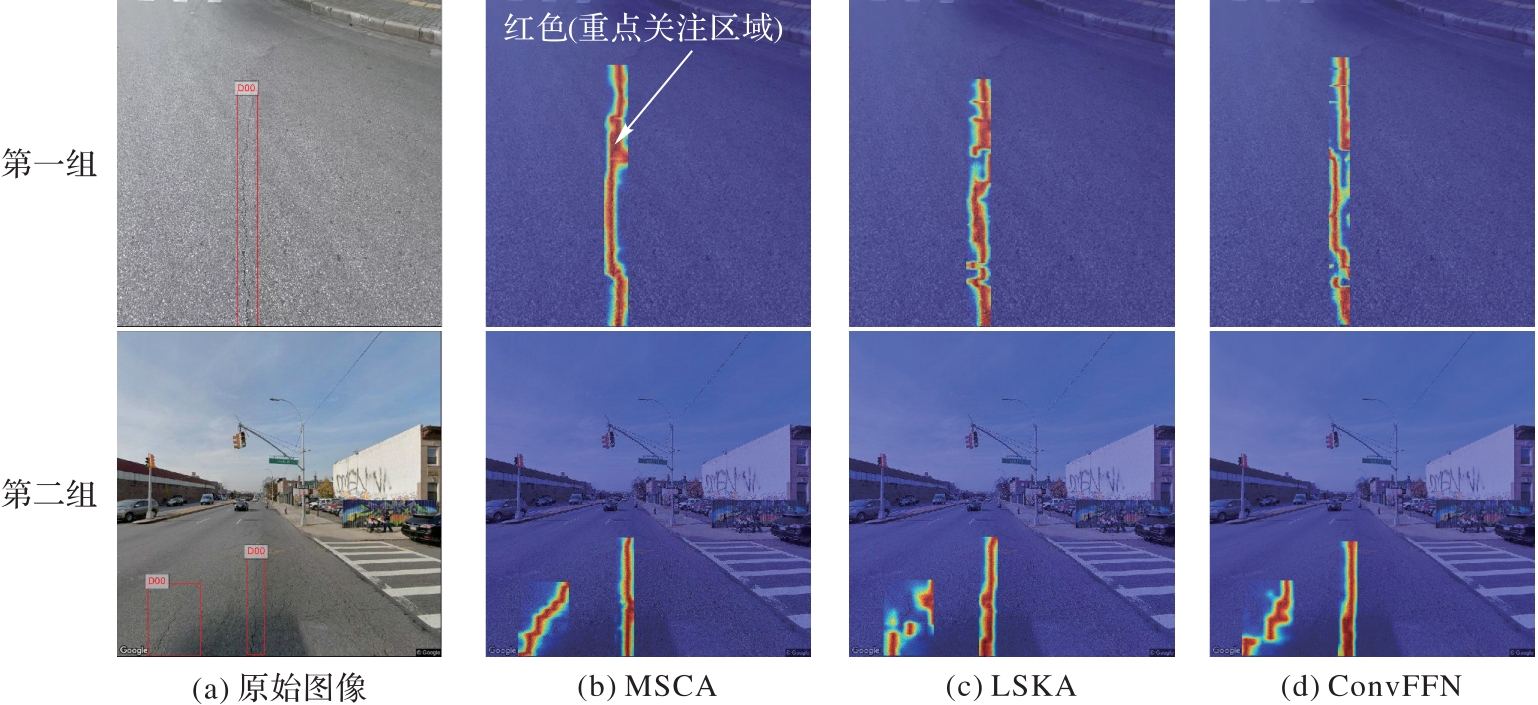
图9 MATIDH中不同注意力机制的热力图可视化对比
Fig. 9 Comparison of heat map visualization using different attention mechanisms in MATIDH
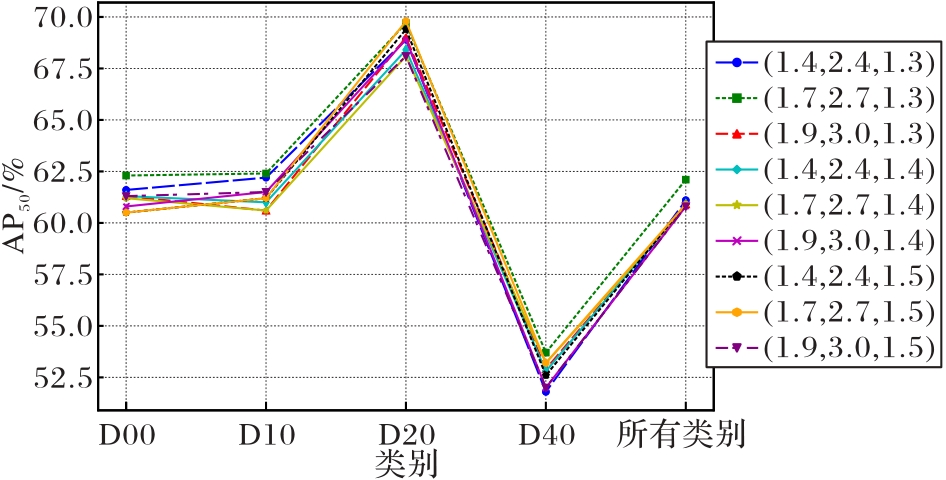
图10 PWIoU中不同超参数组合(α,δ,λ)的对比实验结果
Fig. 10 Comparison experimental results of different hyperparameter combinations (α,δ,λ) in PWIoU
| IoU | AP50 | mAP50 | mAP50:95 | |||
|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||
| CIoU | 61.5 | 62.0 | 69.0 | 50.7 | 60.8 | 31.9 |
| WIoUv3 | 61.0 | 61.3 | 69.1 | 52.6 | 61.0 | 31.9 |
| WIoUv2 | 60.9 | 60.3 | 69.4 | 53.3 | 61.0 | 31.9 |
| WIoUv1 | 61.0 | 61.7 | 68.6 | 52.4 | 60.9 | 32.1 |
| PIoUv1 | 61.1 | 61.2 | 68.2 | 51.2 | 60.4 | 32.0 |
| PIoUv2 | 61.1 | 60.8 | 67.9 | 52.4 | 60.6 | 31.7 |
| PWIoU | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 |
表3 PWIoU Loss函数有效性的对比实验结果 (%)
Tab. 3 Comparison experimental results on effectiveness of PWIoU loss function
| IoU | AP50 | mAP50 | mAP50:95 | |||
|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||
| CIoU | 61.5 | 62.0 | 69.0 | 50.7 | 60.8 | 31.9 |
| WIoUv3 | 61.0 | 61.3 | 69.1 | 52.6 | 61.0 | 31.9 |
| WIoUv2 | 60.9 | 60.3 | 69.4 | 53.3 | 61.0 | 31.9 |
| WIoUv1 | 61.0 | 61.7 | 68.6 | 52.4 | 60.9 | 32.1 |
| PIoUv1 | 61.1 | 61.2 | 68.2 | 51.2 | 60.4 | 32.0 |
| PIoUv2 | 61.1 | 60.8 | 67.9 | 52.4 | 60.6 | 31.7 |
| PWIoU | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 |
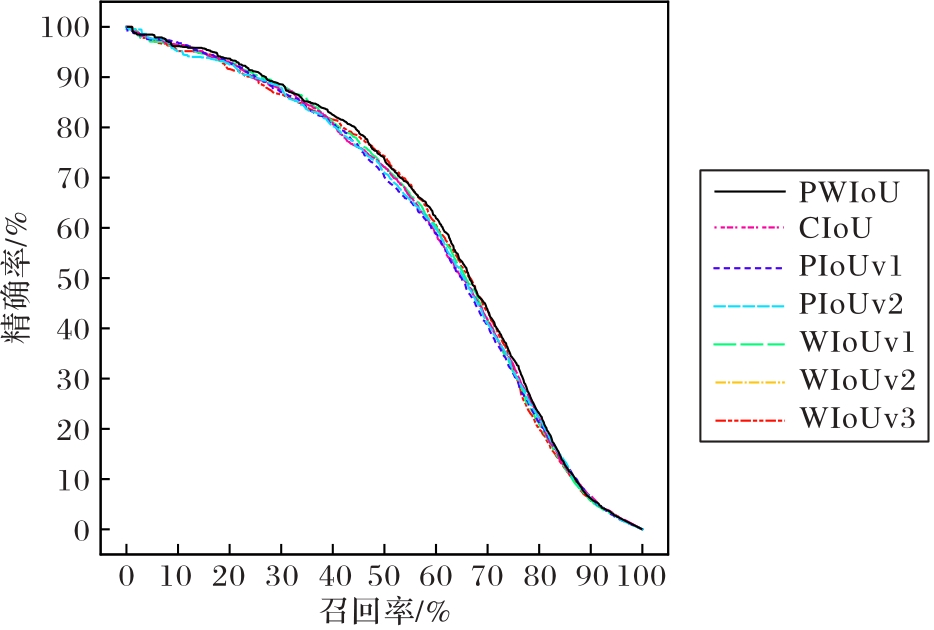
图11 PWIoU与6种损失函数的PR曲线的对比
Fig. 11 Comparison of PR curves between PWIoU and six loss functions
| EEFM | PWIoU | MATIDH | DCFRPN | AP50 /% | P/% | R/% | mAP50 /% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||||
| 59.2 | 59.9 | 67.9 | 48.6 | 63.8 | 54.4 | 58.9 | 8.2 | 3.01 | ||||
| √ | 60.4 | 60.6 | 67.8 | 50.2 | 65.0 | 54.4 | 59.8 | 8.8 | 3.70 | |||
| √ | 60.3 | 60.4 | 67.9 | 51.5 | 64.6 | 54.9 | 60.0 | 8.2 | 3.01 | |||
| √ | 60.9 | 60.7 | 68.1 | 50.7 | 64.8 | 54.4 | 60.1 | 8.0 | 2.45 | |||
| √ | 60.4 | 60.8 | 68.7 | 52.0 | 65.1 | 55.1 | 60.5 | 9.5 | 3.64 | |||
| √ | √ | 61.0 | 60.7 | 68.9 | 51.4 | 65.1 | 54.9 | 60.5 | 8.8 | 3.64 | ||
| √ | √ | √ | 61.7 | 61.8 | 69.1 | 52.6 | 67.2 | 56.4 | 61.3 | 7.6 | 3.02 | |
| √ | √ | √ | √ | 62.3 | 62.5 | 69.7 | 53.7 | 67.3 | 56.7 | 62.1 | 9.1 | 3.93 |
表4 改进模块的消融实验结果
Tab. 4 Ablation experimental results of improved modules
| EEFM | PWIoU | MATIDH | DCFRPN | AP50 /% | P/% | R/% | mAP50 /% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||||
| 59.2 | 59.9 | 67.9 | 48.6 | 63.8 | 54.4 | 58.9 | 8.2 | 3.01 | ||||
| √ | 60.4 | 60.6 | 67.8 | 50.2 | 65.0 | 54.4 | 59.8 | 8.8 | 3.70 | |||
| √ | 60.3 | 60.4 | 67.9 | 51.5 | 64.6 | 54.9 | 60.0 | 8.2 | 3.01 | |||
| √ | 60.9 | 60.7 | 68.1 | 50.7 | 64.8 | 54.4 | 60.1 | 8.0 | 2.45 | |||
| √ | 60.4 | 60.8 | 68.7 | 52.0 | 65.1 | 55.1 | 60.5 | 9.5 | 3.64 | |||
| √ | √ | 61.0 | 60.7 | 68.9 | 51.4 | 65.1 | 54.9 | 60.5 | 8.8 | 3.64 | ||
| √ | √ | √ | 61.7 | 61.8 | 69.1 | 52.6 | 67.2 | 56.4 | 61.3 | 7.6 | 3.02 | |
| √ | √ | √ | √ | 62.3 | 62.5 | 69.7 | 53.7 | 67.3 | 56.7 | 62.1 | 9.1 | 3.93 |
| 算法 | AP50 /% | mAP50 /% | mAP50:95 /% | P/% | R/% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||
| Faster R-CNN[ | 61.9 | 60.1 | 63.8 | 52.4 | 59.5 | 27.5 | 52.3 | 52.9 | 121.45 | 60.13 |
| FCOS | 60.0 | 52.2 | 65.0 | 51.5 | 57.2 | 25.9 | 58.9 | 42.5 | 109.12 | 50.78 |
| VFNet[ | 61.8 | 58.6 | 64.1 | 50.2 | 58.7 | 28.6 | 48.0 | 52.4 | 106.04 | 51.48 |
| TOOD | 61.5 | 59.2 | 64.6 | 50.5 | 58.9 | 28.4 | 55.9 | 48.5 | 153.00 | 53.81 |
| YOLOv5_s | 60.9 | 59.9 | 68.4 | 51.8 | 60.2 | 30.9 | 65.7 | 55.3 | 24.00 | 9.12 |
| YOLOv5_n | 58.6 | 57.9 | 66.3 | 46.9 | 57.4 | 29.0 | 66.2 | 50.9 | 7.10 | 2.50 |
| YOLOX_s | 61.8 | 60.3 | 69.1 | 53.1 | 61.1 | 29.8 | 63.9 | 56.5 | 13.30 | 8.94 |
| YOLOv7_t[ | 60.7 | 56.7 | 65.4 | 52.2 | 58.8 | 27.7 | 63.6 | 54.5 | 13.20 | 6.02 |
| YOLOv8_n | 59.2 | 59.9 | 67.9 | 48.6 | 58.9 | 30.3 | 63.8 | 54.4 | 8.20 | 3.01 |
| Gold-YOLO[ | 60.2 | 59.9 | 67.8 | 51.8 | 59.9 | 29.7 | 63.5 | 56.4 | 12.05 | 5.61 |
| RT-DETR-l[ | 60.5 | 60.2 | 61.3 | 54.7 | 59.2 | 29.0 | 63.5 | 55.2 | 105.20 | 29.30 |
| Swin-T[ | 57.8 | 47.5 | 67.7 | 49.5 | 55.6 | 25.0 | 48.0 | 49.0 | 83.94 | 36.88 |
| YOLOv9_n | 59.9 | 59.2 | 65.7 | 44.4 | 57.3 | 29.1 | 64.1 | 52.3 | 10.70 | 2.62 |
| YOLOv10_n[ | 58.0 | 56.6 | 66.4 | 45.0 | 56.5 | 29.1 | 61.5 | 52.7 | 8.20 | 2.70 |
| YOLOv10_s | 60.1 | 58.0 | 67.8 | 50.4 | 59.1 | 30.8 | 65.9 | 53.0 | 24.50 | 8.04 |
| YOLOv11_n | 53.2 | 54.5 | 63.6 | 40.4 | 53.0 | 26.2 | 61.0 | 49.5 | 6.30 | 2.58 |
| YOLOv11_s | 56.6 | 57.5 | 65.3 | 47.9 | 56.8 | 28.2 | 62.4 | 54.2 | 21.30 | 9.41 |
| 本文算法 | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 | 67.3 | 56.7 | 9.10 | 3.93 |
表5 本文算法和主流算法的对比实验结果
Tab. 5 Comparison experimental results of proposed algorithm and mainstream algorithms
| 算法 | AP50 /% | mAP50 /% | mAP50:95 /% | P/% | R/% | 计算量/GFLOPS | Params/106 | |||
|---|---|---|---|---|---|---|---|---|---|---|
| D00 | D10 | D20 | D40 | |||||||
| Faster R-CNN[ | 61.9 | 60.1 | 63.8 | 52.4 | 59.5 | 27.5 | 52.3 | 52.9 | 121.45 | 60.13 |
| FCOS | 60.0 | 52.2 | 65.0 | 51.5 | 57.2 | 25.9 | 58.9 | 42.5 | 109.12 | 50.78 |
| VFNet[ | 61.8 | 58.6 | 64.1 | 50.2 | 58.7 | 28.6 | 48.0 | 52.4 | 106.04 | 51.48 |
| TOOD | 61.5 | 59.2 | 64.6 | 50.5 | 58.9 | 28.4 | 55.9 | 48.5 | 153.00 | 53.81 |
| YOLOv5_s | 60.9 | 59.9 | 68.4 | 51.8 | 60.2 | 30.9 | 65.7 | 55.3 | 24.00 | 9.12 |
| YOLOv5_n | 58.6 | 57.9 | 66.3 | 46.9 | 57.4 | 29.0 | 66.2 | 50.9 | 7.10 | 2.50 |
| YOLOX_s | 61.8 | 60.3 | 69.1 | 53.1 | 61.1 | 29.8 | 63.9 | 56.5 | 13.30 | 8.94 |
| YOLOv7_t[ | 60.7 | 56.7 | 65.4 | 52.2 | 58.8 | 27.7 | 63.6 | 54.5 | 13.20 | 6.02 |
| YOLOv8_n | 59.2 | 59.9 | 67.9 | 48.6 | 58.9 | 30.3 | 63.8 | 54.4 | 8.20 | 3.01 |
| Gold-YOLO[ | 60.2 | 59.9 | 67.8 | 51.8 | 59.9 | 29.7 | 63.5 | 56.4 | 12.05 | 5.61 |
| RT-DETR-l[ | 60.5 | 60.2 | 61.3 | 54.7 | 59.2 | 29.0 | 63.5 | 55.2 | 105.20 | 29.30 |
| Swin-T[ | 57.8 | 47.5 | 67.7 | 49.5 | 55.6 | 25.0 | 48.0 | 49.0 | 83.94 | 36.88 |
| YOLOv9_n | 59.9 | 59.2 | 65.7 | 44.4 | 57.3 | 29.1 | 64.1 | 52.3 | 10.70 | 2.62 |
| YOLOv10_n[ | 58.0 | 56.6 | 66.4 | 45.0 | 56.5 | 29.1 | 61.5 | 52.7 | 8.20 | 2.70 |
| YOLOv10_s | 60.1 | 58.0 | 67.8 | 50.4 | 59.1 | 30.8 | 65.9 | 53.0 | 24.50 | 8.04 |
| YOLOv11_n | 53.2 | 54.5 | 63.6 | 40.4 | 53.0 | 26.2 | 61.0 | 49.5 | 6.30 | 2.58 |
| YOLOv11_s | 56.6 | 57.5 | 65.3 | 47.9 | 56.8 | 28.2 | 62.4 | 54.2 | 21.30 | 9.41 |
| 本文算法 | 62.3 | 62.5 | 69.7 | 53.7 | 62.1 | 32.1 | 67.3 | 56.7 | 9.10 | 3.93 |

图12 YOLOv8_n算法与本文算法的可视化对比
Fig. 12 Visualization comparison of YOLOv8_n algorithm and proposed algorithm
| 算法 | AP50 /% | P/% | R/% | mAP50 /% | mAP50:95 /% | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| LC | TC | AC | PH | OC | RP | |||||
| Baseline | 80.5 | 82.3 | 89.2 | 46.6 | 75.7 | 91.7 | 81.2 | 73.5 | 77.7 | 46.8 |
| 本文算法 | 86.8 | 85.3 | 93.3 | 57.5 | 82.2 | 92.1 | 88.2 | 74.8 | 82.9 | 52.7 |
表6 UAV-PDD2023数据集上的实验结果
Tab. 6 Experimental results on UAV-PDD2023 dataset
| 算法 | AP50 /% | P/% | R/% | mAP50 /% | mAP50:95 /% | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| LC | TC | AC | PH | OC | RP | |||||
| Baseline | 80.5 | 82.3 | 89.2 | 46.6 | 75.7 | 91.7 | 81.2 | 73.5 | 77.7 | 46.8 |
| 本文算法 | 86.8 | 85.3 | 93.3 | 57.5 | 82.2 | 92.1 | 88.2 | 74.8 | 82.9 | 52.7 |

图13 两种算法在UAV-PDD2023数据集上的可视化对比
Fig. 13 Visualization comparison of two algorithms on UAV-PDD2023 dataset
| [1] | WANG X, GIRSHICK R, GUPTA A, et al. Non-local neural networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7794-7803. |
| [2] | YU G, ZHOU X. An improved YOLOv5 crack detection method combined with a bottleneck Transformer[J]. Mathematics, 2023, 11(10): No.2377. |
| [3] | XIANG X, WANG Z, QIAO Y. An improved YOLOv5 crack detection method combined with Transformer[J]. IEEE Sensors Journal, 2022, 22(14): 14328-14335. |
| [4] | WANG S, CAI B, WANG W, et al. Automated detection of pavement distress based on enhanced YOLOv8 and synthetic data with textured background modeling[J]. Transportation Geotechnics, 2024, 48: No.101304. |
| [5] | 任安虎,姜子渊,马晨浩. 基于改进YOLOv5s的道路裂缝检测算法[J]. 激光杂志, 2024, 45(4): 88-94. |
| REN A H, JIANG Z Y, MA C H. Road crack detection algorithm based on improved YOLOv5s[J]. Laser Journal, 2024, 45(4): 88-94. | |
| [6] | LIU Y, SHAO Z, HOFFMANN N. Global attention mechanism: retain information to enhance channel-spatial interactions[EB/OL]. [2024-10-11].. |
| [7] | ZENG J, ZHONG H. YOLOv8-PD: an improved road damage detection algorithm based on YOLOv8n model[J]. Scientific Reports, 2024, 14: No.12052. |
| [8] | 王海群,王炳楠,葛超. 重参数化YOLOv8路面病害检测算法[J]. 计算机工程与应用, 2024, 60(5): 191-199. |
| WANG H Q, WANG B N, GE C. Re-parameterized YOLOv8 pavement disease detection algorithm[J]. Computer Engineering and Applications, 2024, 60(5): 191-199. | |
| [9] | DING X, ZHANG X, MA N, et al. RepVGG: making VGG-style ConvNets great again[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13728-13737. |
| [10] | DING X, ZHANG X, HAN J, et al. Diverse branch block: building a convolution as an inception-like unit[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 10881-10890. |
| [11] | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. |
| [12] | WANG X, GAO H, JIA Z, et al. BL-YOLOv8: an improved road defect detection model based on YOLOv8[J]. Sensors, 2023, 23(20): No.8361. |
| [13] | TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10778-10787. |
| [14] | DUAN K, BAI S, XIE L, et al. CenterNet: keypoint triplets for object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6568-6577. |
| [15] | TIAN Z, SHEN C, CHEN H, et al. FCOS: a simple and strong anchor-free object detector[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(4): 1922-1933. |
| [16] | ZHANG S, CHI C, YAO Y, et al. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 9756-9765. |
| [17] | FENG C, ZHONG Y, GAO Y, et al. TOOD: task-aligned one-stage object detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3490-3499. |
| [18] | GE Z, LIU S, WANG F, et al. YOLOX: exceeding YOLO series in 2021[EB/OL]. [2024-10-11].. |
| [19] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| [20] | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| [21] | HAN K, WANG Y, TIAN Q, et al. GhostNet: more features from cheap operations[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1577-1586. |
| [22] | LIU W, LU H, FU H, et al. Learning to upsample by learning to sample[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6004-6014. |
| [23] | SHI W, CABALLERO J, HUSZÁR F, et al. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1874-1883. |
| [24] | WANG C Y, YEH I H, LIAO H Y M. YOLOv9: learning what you want to learn using programmable gradient information[C]// Proceedings of the 2024 European Conference on Computer Vision, LNCS 15089. Cham: Springer, 2025: 1-21. |
| [25] | GUO M H, LU C Z, HOU Q, et al. SegNeXt: rethinking convolutional attention design for semantic segmentation[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2022: 1140-1156. |
| [26] | WU Y, HE K. Group normalization[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11217. Cham: Springer, 2018: 3-19. |
| [27] | TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[EB/OL]. [2024-10-11].. |
| [28] | LIU C, WANG K, LI Q, et al. Powerful-IoU: more straightforward and faster bounding box regression loss with a nonmonotonic focusing mechanism[J]. Neural Networks, 2024, 170: 276-284. |
| [29] | ARYA D, MAEDA H, GHOSH S K, et al. RDD2022: a multi-national image dataset for automatic road damage detection[J]. Geoscience Data Journal, 2024,11: 846-862. |
| [30] | YAN H, ZHANG J. UAV-PDD2023: a benchmark dataset for pavement distress detection based on UAV images[J]. Data in Brief, 2023, 51: No.109692. |
| [31] | LAU K W, PO L M, REHMAN Y A U. Large separable kernel attention: rethinking the large kernel attention design in CNN[J]. Expert Systems with Applications, 2024, 236: No.121352. |
| [32] | XIA Z, PAN X, SONG S, et al. Vision Transformer with deformable attention[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 4784-4793. |
| [33] | FAN Q, HUANG H, GUAN J, et al. Rethinking local perception in lightweight vision Transformer[EB/OL]. [2024-10-11].. |
| [34] | SHI D. TransNeXt: robust foveal visual perception for vision Transformers[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 17773-17783. |
| [35] | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| [36] | ZHANG H, WANG Y, DAYOUB F, et al. VarifocalNet: an IoU-aware dense object detector[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 8510-8519. |
| [37] | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 7464-7475. |
| [38] | WANG C, HE W, NIE Y, et al. Gold-YOLO: efficient object detector via gather-and-distribute mechanism[C]// Proceedings of the 37th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2023: 51094-51112. |
| [39] | ZHAO Y, LV W, XU S, et al. DETRs beat YOLOs on real-time object detection[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 16965-16974. |
| [40] | LIU Z, LIN Y, CAO Y, et al. Swin Transformer: hierarchical vision Transformer using shifted windows[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 9992-10002. |
| [41] | WANG A, CHEN H, LIU L, et al. YOLOv10: real-time end-to-end object detection[C]// Proceedings of the 38th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2024: 107984-108011. |
| [1] | 梁一鸣, 范菁, 柴汶泽. 基于双向交叉注意力的多尺度特征融合情感分类[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2773-2782. |
| [2] | 颜承志, 陈颖, 钟凯, 高寒. 基于多尺度网络与轴向注意力的3D目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2537-2545. |
| [3] | 陈亮, 王璇, 雷坤. 复杂场景下跨层多尺度特征融合的安全帽佩戴检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2333-2341. |
| [4] | 陈丹阳, 张长伦. 多尺度去相关的图卷积网络模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2180-2187. |
| [5] | 王向, 崔倩倩, 张晓明, 王建超, 王震洲, 宋佳霖. 改进ConvNeXt的无线胶囊内镜图像分类模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 2016-2024. |
| [6] | 陈盈涛, 方康康, 张金敖, 梁浩然, 郭焕斌, 邱兆文. 基于多尺度空间特征的冠状动脉CT血管造影图像分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 2007-2015. |
| [7] | 周天彤, 郑妍琪, 魏韬, 戴亚康, 邹凌. 融合变分图自编码器与局部-全局图网络的认知负荷脑电识别模型[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1849-1857. |
| [8] | 郭诗月, 党建武, 王阳萍, 雍玖. 结合注意力机制和多尺度特征融合的三维手部姿态估计[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1293-1299. |
| [9] | 令狐鑫瑶, 陈燕, 张鹏程, 刘祎, 桂志国, 赵伟, 董展豪. 基于多尺度引导滤波的宫颈细胞核图像分割[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1333-1339. |
| [10] | 姜坤元, 李小霞, 王利, 曹耀丹, 张晓强, 丁楠, 周颖玥. 引入解耦残差自注意力的边界交叉监督语义分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1120-1129. |
| [11] | 袁宝华, 陈佳璐, 王欢. 融合多尺度语义和双分支并行的医学图像分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 988-995. |
| [12] | 张众维, 王俊, 刘树东, 王志恒. 多尺度特征融合与加权框融合的遥感图像目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 633-639. |
| [13] | 王子怡, 李卫军, 刘雪洋, 丁建平, 刘世侠, 苏易礌. 基于Swin Transformer与多尺度特征融合的图像描述方法[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3154-3160. |
| [14] | 李钟华, 钟庚辛, 范萍, 朱恒亮. 边界挖掘和背景引导的伪装目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3328-3335. |
| [15] | 刘赏, 周煜炜, 代娆, 董林芳, 刘猛. 融合注意力和上下文信息的遥感图像小目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 292-300. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||