


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (4): 1271-1284.DOI: 10.11772/j.issn.1001-9081.2024040561
赵轻轻1,2, 胡滨1,2,3( )
)
收稿日期:2024-05-07
修回日期:2024-09-24
接受日期:2024-09-26
发布日期:2025-04-08
出版日期:2025-04-10
通讯作者:
胡滨
作者简介:赵轻轻(1995—),女,贵州仁怀人,硕士研究生,主要研究方向:计算智能、计算机视觉;
基金资助:
Qingqing ZHAO1,2, Bin HU1,2,3()
Received:2024-05-07
Revised:2024-09-24
Accepted:2024-09-26
Online:2025-04-08
Published:2025-04-10
Contact:
Bin HU
About author:ZHAO Qingqing, born in 1995, M. S. candidate. Her research interests include computing intelligence, computer vision.
Supported by:摘要:
行人作为非刚性物体,对它的视觉特征进行有效的不变表示是提高识别效果的关键。在自然视觉场景中,运动行人通常会发生尺度、背景、姿态等变化,这对用现有技术提取这些不规则特征造成阻碍。针对该问题,基于哺乳动物视网膜神经结构特性,探究运动行人不变性识别问题,并提出一种适用于视觉场景的运动行人检测神经网络(MPDNN)。MPDNN包括2个神经模块:突触前网络和突触后网络。其中,突触前网络感知表征运动目标的低阶视觉运动线索,并提取目标的二值化视觉信息;突触后网络借助生物视觉系统中的稀疏不变响应特性,利用目标轮廓在连续改变形状后较大凹凸区域之间的位置关系不变特性,从低阶运动线索中编码平稳变化的视觉特征以构建行人不变表征。实验结果表明,MPDNN在公共数据集CUHK Avenue与EPFL上达到了96.96%的跨域检测准确率,比SOTA (State Of The Art)模型高4.52个百分点;在尺度、运动姿势变化数据集上也表现了较好的鲁棒性,准确率分别达到了89.48%与91.45%。以上实验结果验证了生物不变性物体识别机制在运动行人检测中的有效性。
中图分类号:
赵轻轻, 胡滨. 不变性全局稀疏轮廓点表征的运动行人检测神经网络[J]. 计算机应用, 2025, 45(4): 1271-1284.
Qingqing ZHAO, Bin HU. Moving pedestrian detection neural network with invariant global sparse contour point representation[J]. Journal of Computer Applications, 2025, 45(4): 1271-1284.
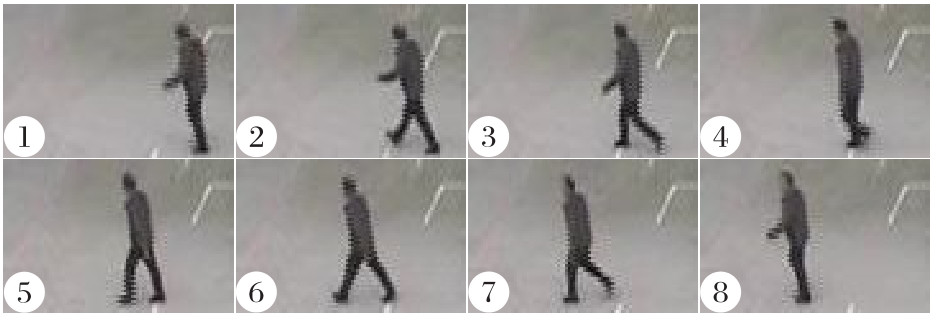
图1 行人行走姿态示意图
Fig. 1 Schematic diagrams of pedestrian walking posture
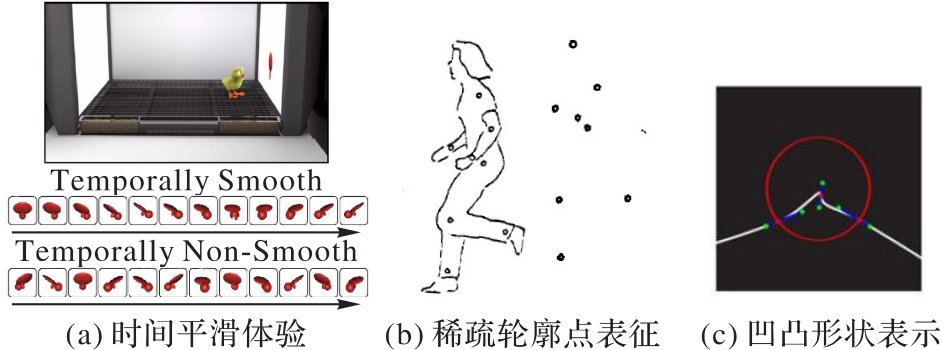
图2 不变性物体识别
Fig. 2 Invariant object recognition
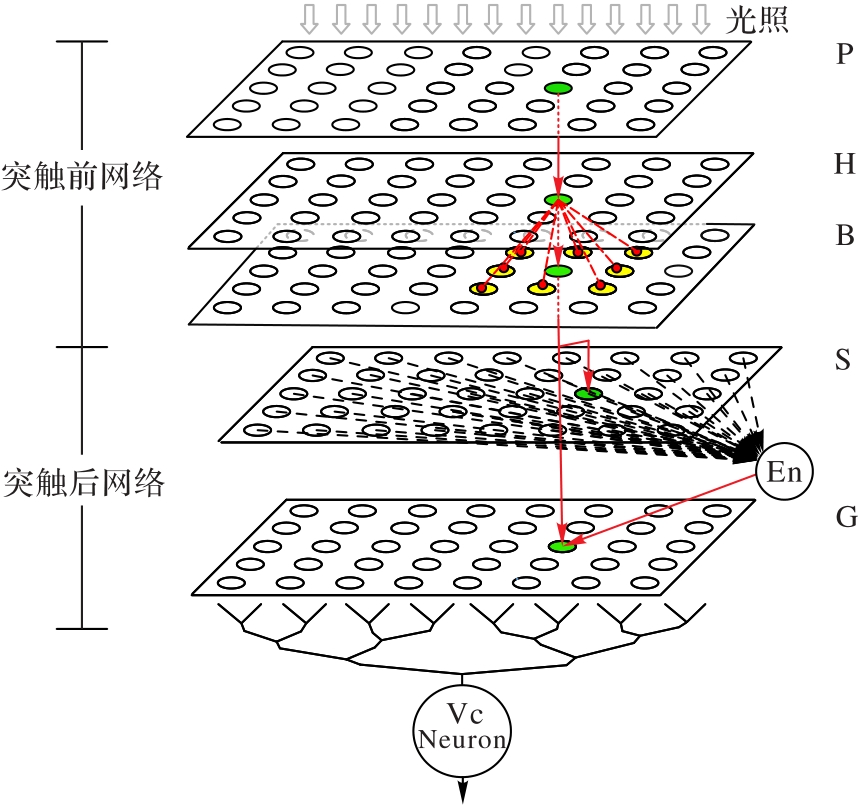
图3 MPDNN结构
Fig. 3 Structure of MPDNN
| 参数名 | 值 | 参数名 | 值 |
|---|---|---|---|
| 1 280 | 0.8 | ||
| 720 | 3 | ||
| 220 | 1 | ||
| 2 | 3 | ||
| 9 | 0.6 | ||
| 0.92 | 0.5 | ||
| 200 | 800 |
表1 MPDNN参数设置
Tab. 1 Parameter setting of MPDNN
| 参数名 | 值 | 参数名 | 值 |
|---|---|---|---|
| 1 280 | 0.8 | ||
| 720 | 3 | ||
| 220 | 1 | ||
| 2 | 3 | ||
| 9 | 0.6 | ||
| 0.92 | 0.5 | ||
| 200 | 800 |
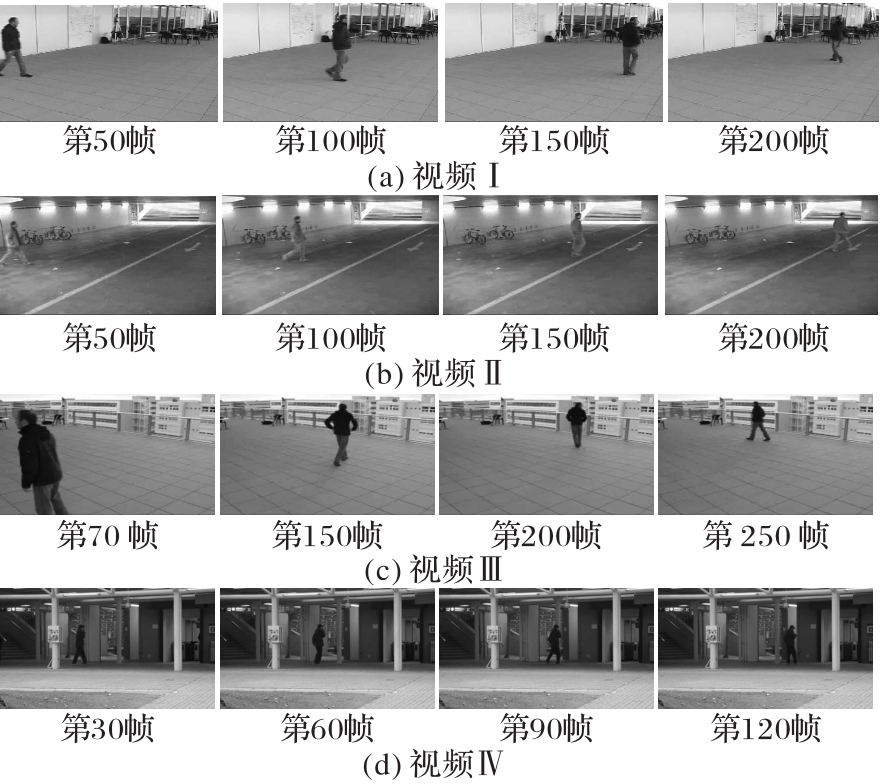
图4 有效性测试的视频序列
Fig. 4 Validity test video sequences
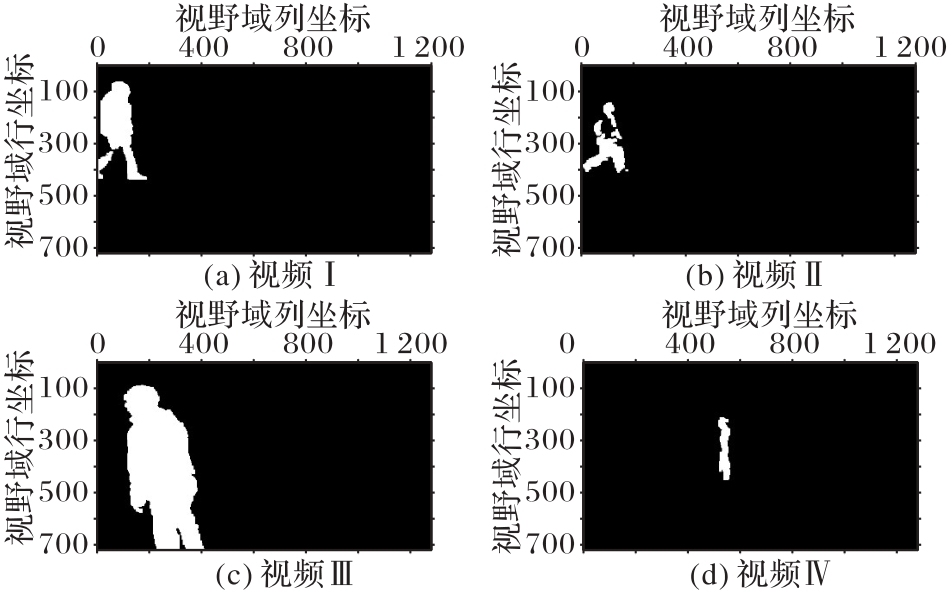
图5 神经层G有效性测试的膜电位可视化结果
Fig. 5 Visualization of membrane potential results for validity test of neural layer G
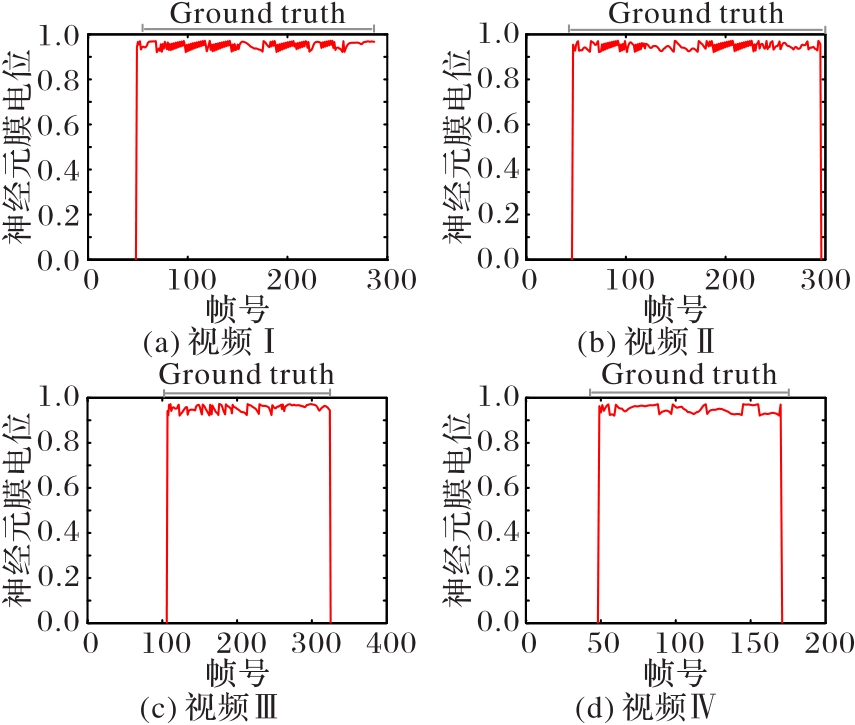
图6 神经元Vc有效性测试的输出曲线
Fig. 6 Output curves for validity test of neuronVc
| 视频序号 | 总帧数 | 实际行人所在 时间序列的帧号范围 | MPDNN检测出的 时间序列的帧号范围 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | |||||||
| Ⅰ | 287 | 46~287 | 49~287 | 239 | 45 | 3 | 0 | 98.95 | 1.24 | 0.00 |
| Ⅱ | 300 | 45~300 | 47~295 | 249 | 44 | 7 | 0 | 97.67 | 2.73 | 0.00 |
| Ⅲ | 325 | 105~325 | 107~324 | 218 | 104 | 3 | 0 | 99.08 | 1.36 | 0.00 |
| Ⅳ | 175 | 34~175 | 49~170 | 122 | 33 | 20 | 0 | 88.57 | 14.08 | 0.00 |
表2 有效性测试的数值统计结果
Tab. 2 Numerical statistical results of validity test
| 视频序号 | 总帧数 | 实际行人所在 时间序列的帧号范围 | MPDNN检测出的 时间序列的帧号范围 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | |||||||
| Ⅰ | 287 | 46~287 | 49~287 | 239 | 45 | 3 | 0 | 98.95 | 1.24 | 0.00 |
| Ⅱ | 300 | 45~300 | 47~295 | 249 | 44 | 7 | 0 | 97.67 | 2.73 | 0.00 |
| Ⅲ | 325 | 105~325 | 107~324 | 218 | 104 | 3 | 0 | 99.08 | 1.36 | 0.00 |
| Ⅳ | 175 | 34~175 | 49~170 | 122 | 33 | 20 | 0 | 88.57 | 14.08 | 0.00 |
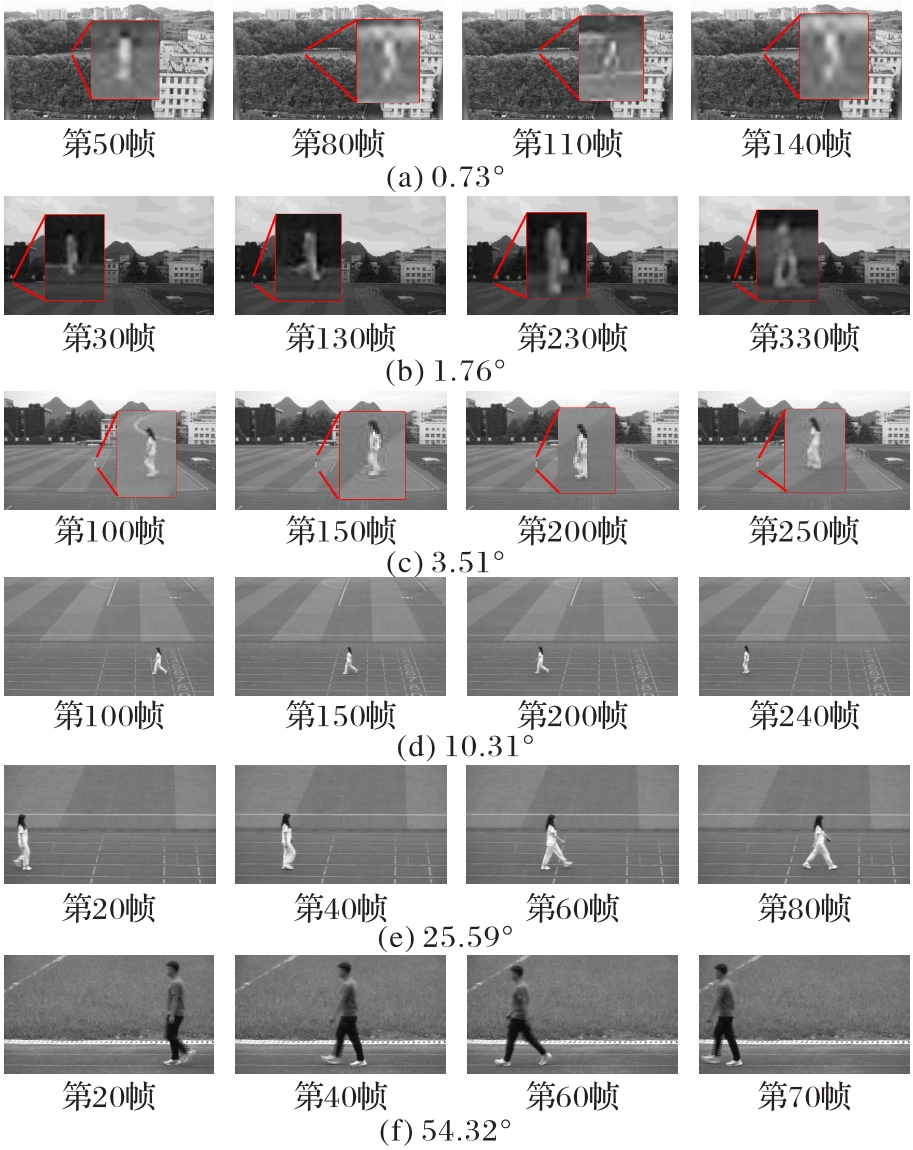
图7 尺度测试视频序列
Fig. 7 Scale test video sequences
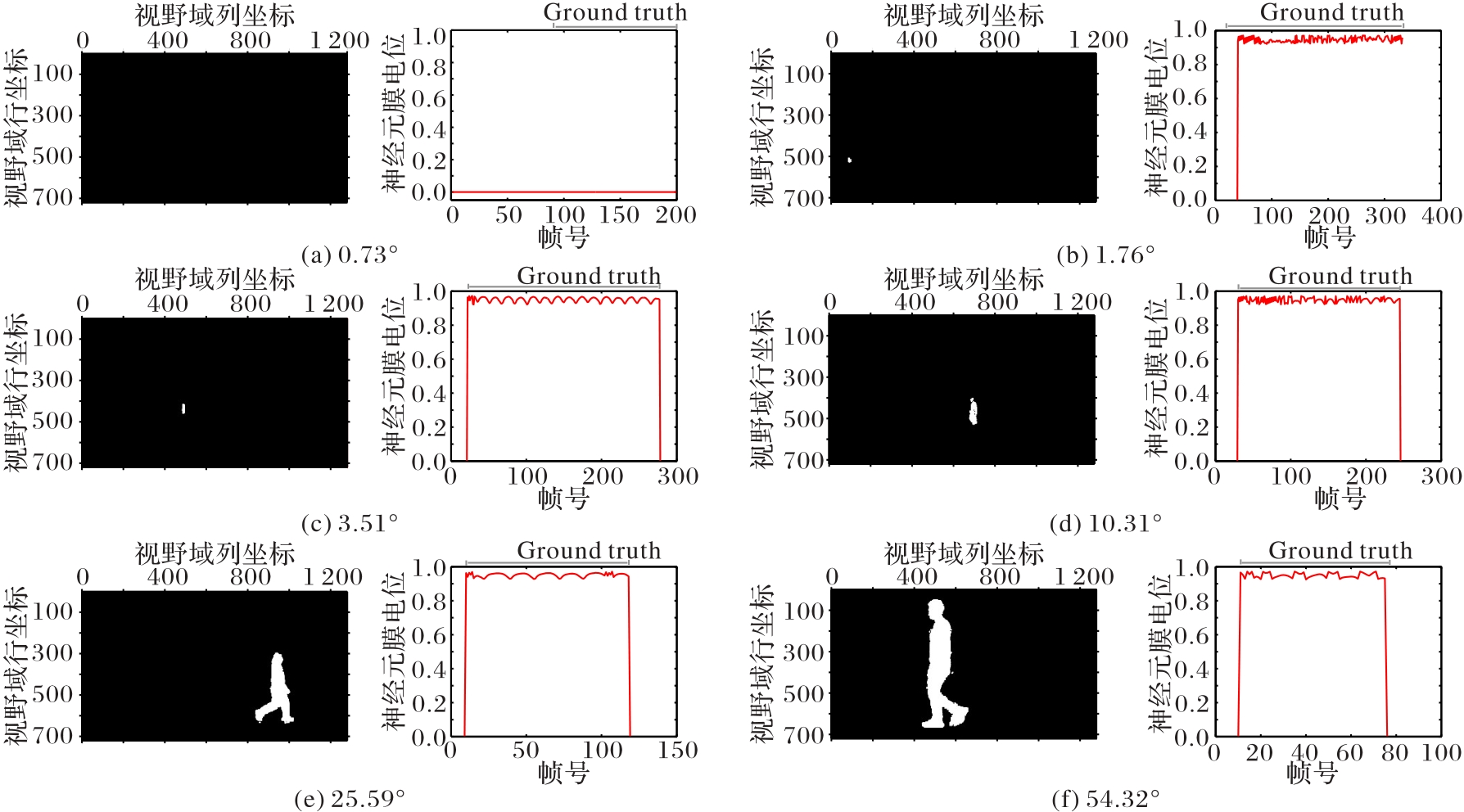
图8 神经层G与神经元Vc尺度测试的输出结果
Fig. 8 Output results of scale test for neural layer G and neuron Vc
| 视频 | 总帧数 | 行人尺度/(°) | 实际行人所在时间序列的帧号范围 | MPDNN检测时间序列的帧号范围 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|---|
| 200 | 0.73 | 90~200 | 0 | 0.00 | 100.00 | 0.00 | |
| 333 | 1.76 | 16~333 | 41~333 | 92.14 | 7.86 | 0.00 | |
| 290 | 3.51 | 13~273 | 13~273 | 100.00 | 0.00 | 0.00 | |
| 253 | 10.31 | 16~236 | 21~236 | 100.00 | 0.00 | 0.00 | |
| 130 | 25.59 | 11~119 | 11~119 | 100.00 | 0.00 | 0.00 | |
| 87 | 54.32 | 12~76 | 12~76 | 100.00 | 0.00 | 0.00 |
表3 尺度测试的数值统计结果
Tab. 3 Numerical statistical results of scale test
| 视频 | 总帧数 | 行人尺度/(°) | 实际行人所在时间序列的帧号范围 | MPDNN检测时间序列的帧号范围 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|---|
| 200 | 0.73 | 90~200 | 0 | 0.00 | 100.00 | 0.00 | |
| 333 | 1.76 | 16~333 | 41~333 | 92.14 | 7.86 | 0.00 | |
| 290 | 3.51 | 13~273 | 13~273 | 100.00 | 0.00 | 0.00 | |
| 253 | 10.31 | 16~236 | 21~236 | 100.00 | 0.00 | 0.00 | |
| 130 | 25.59 | 11~119 | 11~119 | 100.00 | 0.00 | 0.00 | |
| 87 | 54.32 | 12~76 | 12~76 | 100.00 | 0.00 | 0.00 |

图9 运动姿势测试的视频序列
Fig. 9 Motion posture test video sequences
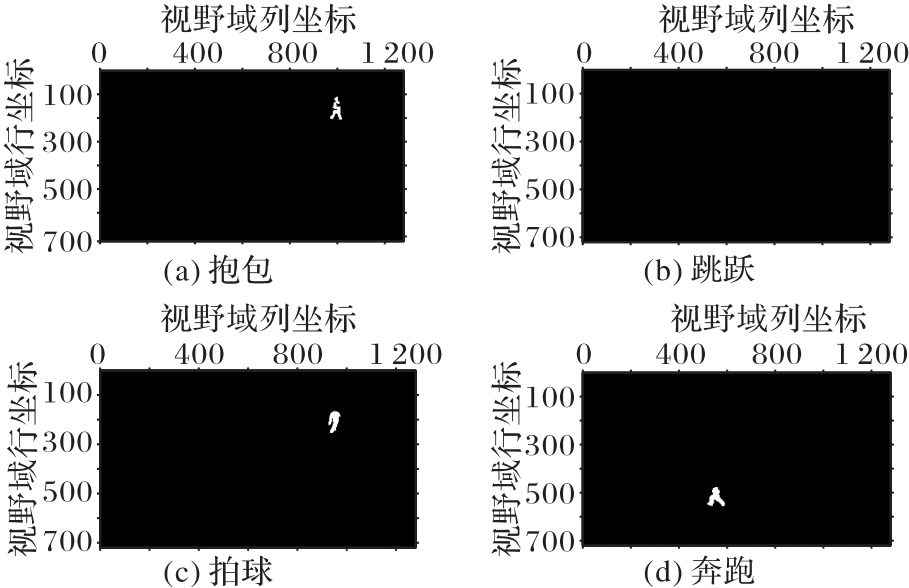
图10 神经层G运动姿势测试的膜电位可视化结果
Fig. 10 Visualization of membrane potential results for motion posture test of neural layer G
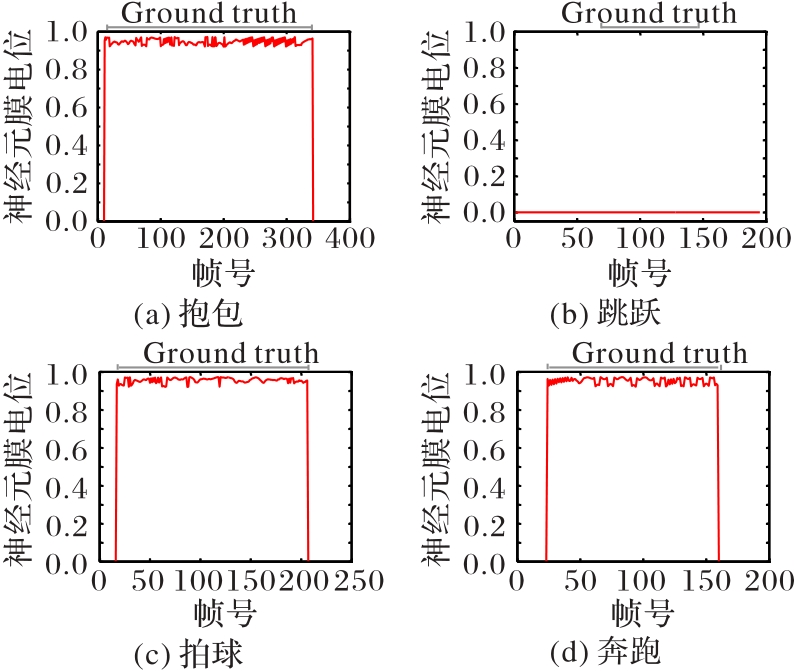
图11 神经元Vc运动姿势测试的输出曲线
Fig. 11 Output curves for motion posture test of neuron Vc
| 视频 | 总帧数 | 实际行人所在时间序列的帧号范围 | MPDNN检测时间序列的帧号范围 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|
| 355 | 12~342 | 12~342 | 100.00 | 0.00 | 0.00 | |
| 195 | 67~147 | 0 | 58.46 | 100.00 | 0.00 | |
| 224 | 16~207 | 16~207 | 100.00 | 0.00 | 0.00 | |
| 162 | 21~156 | 21~156 | 100.00 | 0.00 | 0.00 |
表4 运动姿势测试数值统计结果
Tab. 4 Numerical statistical results of motion posture test
| 视频 | 总帧数 | 实际行人所在时间序列的帧号范围 | MPDNN检测时间序列的帧号范围 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|
| 355 | 12~342 | 12~342 | 100.00 | 0.00 | 0.00 | |
| 195 | 67~147 | 0 | 58.46 | 100.00 | 0.00 | |
| 224 | 16~207 | 16~207 | 100.00 | 0.00 | 0.00 | |
| 162 | 21~156 | 21~156 | 100.00 | 0.00 | 0.00 |
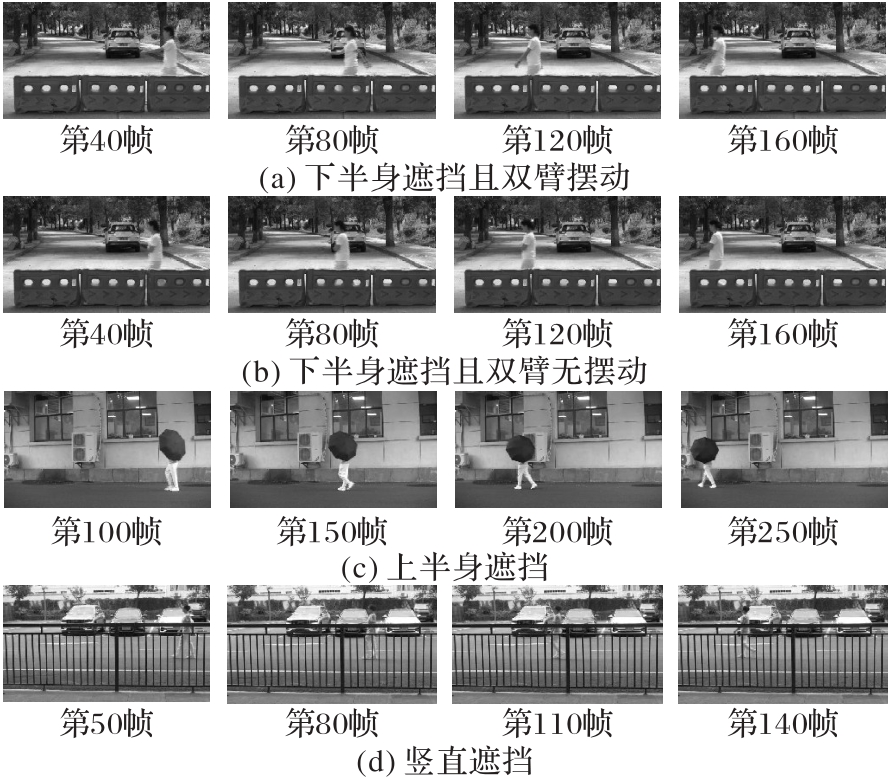
图12 遮挡测试的视频序列
Fig. 12 Occlusion test video sequences
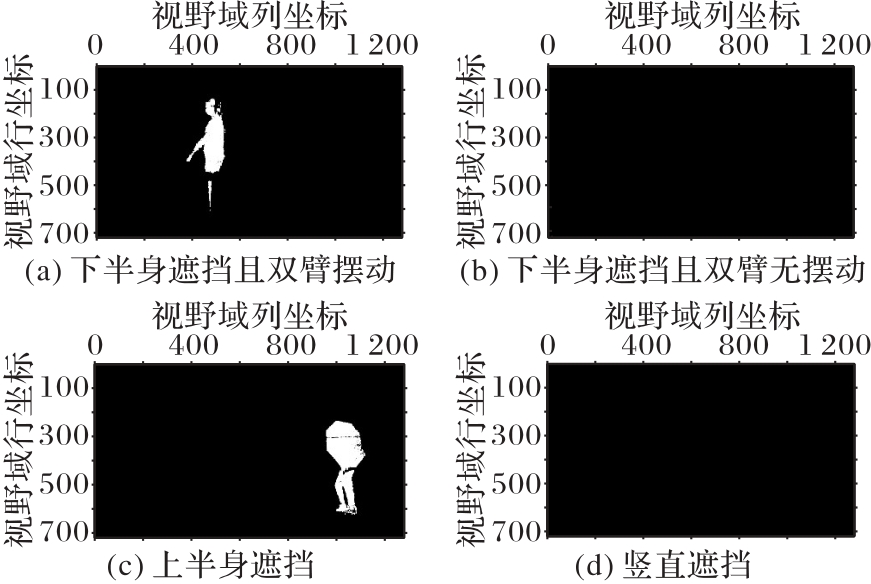
图13 神经层G遮挡测试的膜电位可视化
Fig. 13 Visualization of membrane potential results for occlusion test of neural layer G
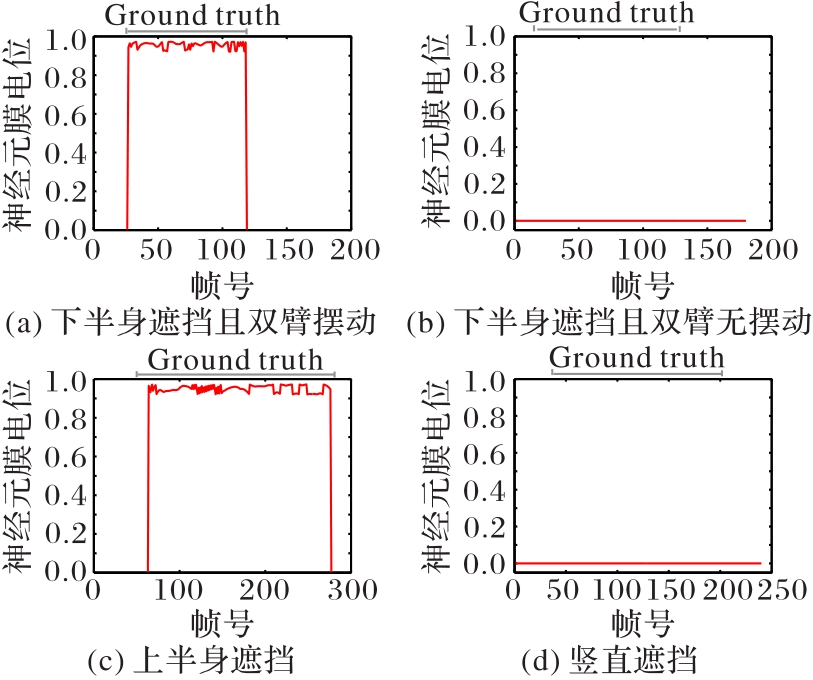
图14 神经元Vc遮挡测试的输出曲线
Fig. 14 Output curve for occlusion test of neuron Vc
| 视频 | 总帧数 | 实际行人所在时间序列 | MPDNN检测时间序列 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|
| 165 | 22~118 | 27~118 | 96.95 | 5.15 | 0.00 | |
| 180 | 14~120 | 0 | 40.56 | 100.00 | 0.00 | |
| 300 | 71~283 | 82~279 | 95.00 | 7.04 | 0.00 | |
| 240 | 34~196 | 0 | 32.37 | 100.00 | 0.00 |
表5 遮挡测试的数值统计结果
Tab. 5 Numerical statistical results of occlusion test
| 视频 | 总帧数 | 实际行人所在时间序列 | MPDNN检测时间序列 | ACC/% | FNR/% | FPR/% |
|---|---|---|---|---|---|---|
| 165 | 22~118 | 27~118 | 96.95 | 5.15 | 0.00 | |
| 180 | 14~120 | 0 | 40.56 | 100.00 | 0.00 | |
| 300 | 71~283 | 82~279 | 95.00 | 7.04 | 0.00 | |
| 240 | 34~196 | 0 | 32.37 | 100.00 | 0.00 |
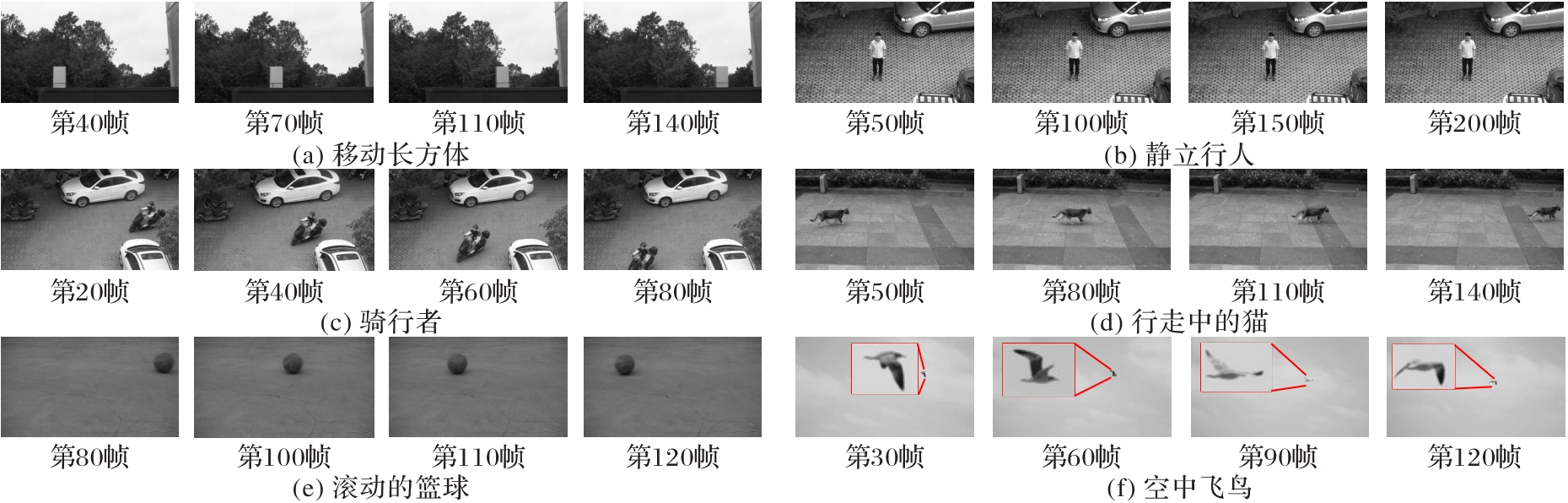
图15 偏好性测试的视频序列
Fig. 15 Preference test video sequences
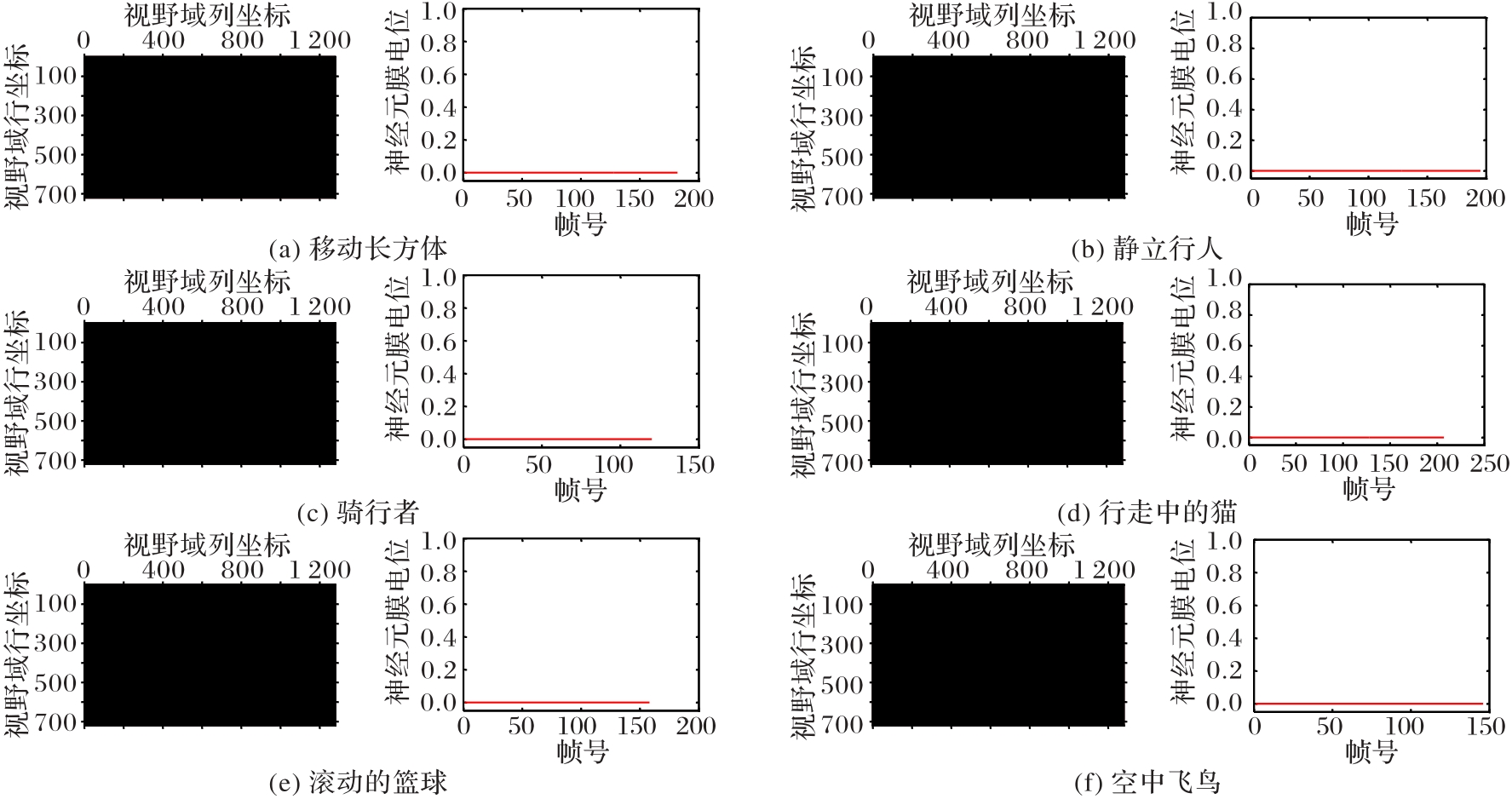
图16 神经层G与神经元Vc偏好性测试的输出结果
Fig. 16 Output results of preference test for neural layer G and neuron Vc
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| Faster R-CNN[ | 842 | 198 | 19 | 66 | 92.44 | 2.21 | 6.07 |
| Cascade R-CNN[ | 861 | 177 | 0 | 102 | 91.05 | 0.00 | 9.38 |
| YOLOv5[ | 856 | 221 | 5 | 217 | 82.91 | 0.58 | 19.96 |
| YOLOv8[ | 851 | 215 | 10 | 241 | 80.94 | 1.16 | 22.17 |
| SSD[ | 786 | 205 | 75 | 24 | 90.92 | 8.71 | 2.21 |
| MPDNN | 828 | 226 | 33 | 0 | 96.96 | 3.83 | 0.00 |
表6 目标检测模型的对比实验数值统计结果
Tab. 6 Numerical statistical results of comparison experiments of object detection models
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| Faster R-CNN[ | 842 | 198 | 19 | 66 | 92.44 | 2.21 | 6.07 |
| Cascade R-CNN[ | 861 | 177 | 0 | 102 | 91.05 | 0.00 | 9.38 |
| YOLOv5[ | 856 | 221 | 5 | 217 | 82.91 | 0.58 | 19.96 |
| YOLOv8[ | 851 | 215 | 10 | 241 | 80.94 | 1.16 | 22.17 |
| SSD[ | 786 | 205 | 75 | 24 | 90.92 | 8.71 | 2.21 |
| MPDNN | 828 | 226 | 33 | 0 | 96.96 | 3.83 | 0.00 |
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| F2DNet[ | 171 | 226 | 690 | 0 | 36.52 | 80.14 | 0.00 |
| VLPD[ | 265 | 201 | 596 | 45 | 42.10 | 69.22 | 4.14 |
| Pedestron[ | 661 | 197 | 200 | 16 | 79.89 | 23.23 | 1.47 |
| BFDA[ | 725 | 226 | 136 | 0 | 87.49 | 15.80 | 0.00 |
| MPDNN | 828 | 226 | 33 | 0 | 96.96 | 3.83 | 0.00 |
表7 行人检测模型的对比实验数值统计结果
Tab. 7 Numerical statistical results of comparison experiments of pedestrian detection models
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| F2DNet[ | 171 | 226 | 690 | 0 | 36.52 | 80.14 | 0.00 |
| VLPD[ | 265 | 201 | 596 | 45 | 42.10 | 69.22 | 4.14 |
| Pedestron[ | 661 | 197 | 200 | 16 | 79.89 | 23.23 | 1.47 |
| BFDA[ | 725 | 226 | 136 | 0 | 87.49 | 15.80 | 0.00 |
| MPDNN | 828 | 226 | 33 | 0 | 96.96 | 3.83 | 0.00 |
| 模型 | 有效性测试数据集 | 尺度测试数据集 | 运动姿势测试数据集 | 遮挡测试数据集 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ACC | FNR | FPR | ACC | FNR | FPR | ACC | FNR | FPR | ACC | FNR | FPR | |
| EMFD+SVM[ | 95.78 | 4.56 | 0.00 | 46.64 | 63.59 | 0.00 | 76.98 | 29.03 | 0.00 | 38.54 | 81.59 | 0.00 |
| SOF+ACF[ | 63.29 | 49.21 | 0.00 | 66.82 | 39.54 | 0.00 | 67.37 | 34.51 | 0.00 | 41.23 | 78.35 | 0.00 |
| TSM[ | 92.37 | 4.15 | 0.00 | 66.56 | 39.54 | 0.00 | 63.46 | 46.22 | 0.00 | 67.57 | 49.48 | 0.00 |
| DeepStep[ | 98.31 | 2.41 | 0.00 | 59.09 | 51.86 | 0.00 | 87.69 | 13.47 | 0.00 | 57.81 | 72.24 | 0.00 |
| MPDNN | 96.96 | 3.83 | 0.00 | 89.48 | 12.53 | 0.00 | 91.45 | 10.79 | 0.00 | 68.86 | 46.21 | 0.00 |
表8 运动行人检测模型的对比实验数值统计结果 (%)
Tab. 8 Numerical statistical results of comparison experiments of moving pedestrian detection models
| 模型 | 有效性测试数据集 | 尺度测试数据集 | 运动姿势测试数据集 | 遮挡测试数据集 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ACC | FNR | FPR | ACC | FNR | FPR | ACC | FNR | FPR | ACC | FNR | FPR | |
| EMFD+SVM[ | 95.78 | 4.56 | 0.00 | 46.64 | 63.59 | 0.00 | 76.98 | 29.03 | 0.00 | 38.54 | 81.59 | 0.00 |
| SOF+ACF[ | 63.29 | 49.21 | 0.00 | 66.82 | 39.54 | 0.00 | 67.37 | 34.51 | 0.00 | 41.23 | 78.35 | 0.00 |
| TSM[ | 92.37 | 4.15 | 0.00 | 66.56 | 39.54 | 0.00 | 63.46 | 46.22 | 0.00 | 67.57 | 49.48 | 0.00 |
| DeepStep[ | 98.31 | 2.41 | 0.00 | 59.09 | 51.86 | 0.00 | 87.69 | 13.47 | 0.00 | 57.81 | 72.24 | 0.00 |
| MPDNN | 96.96 | 3.83 | 0.00 | 89.48 | 12.53 | 0.00 | 91.45 | 10.79 | 0.00 | 68.86 | 46.21 | 0.00 |
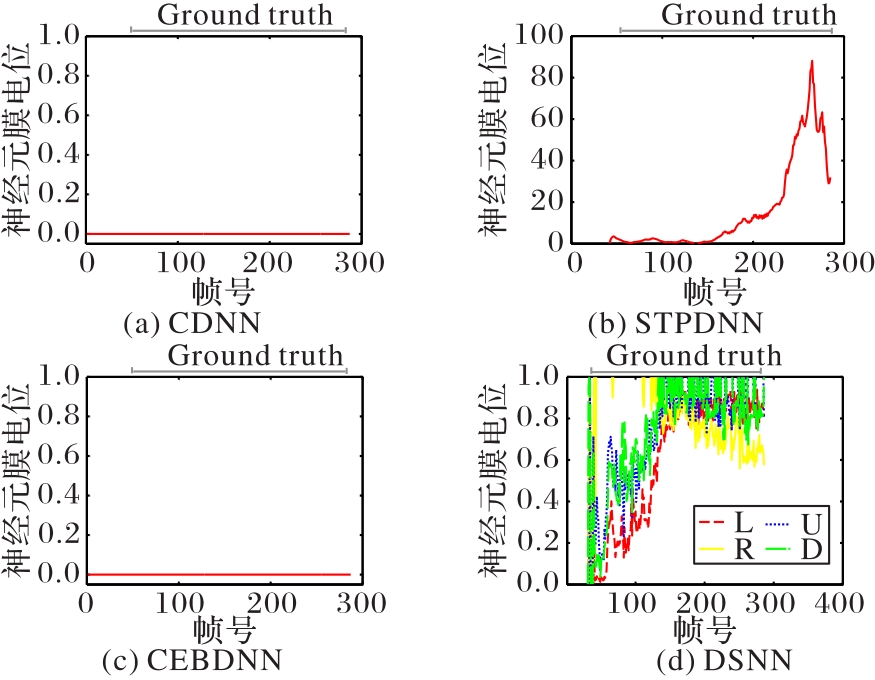
图17 同源模型的膜电位响应输出曲线
Fig. 17 Membrane potential response output curves of homologous models
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| CDNN[ | 0 | 45 | 242 | 0 | 15.68 | 100.00 | 0.00 |
| CEBDNN[ | 0 | 45 | 242 | 0 | 15.68 | 100.00 | 0.00 |
| DSNN[ | 124 | 45 | 118 | 124 | 41.12 | 48.76 | 43.21 |
| STPDNN[ | 138 | 45 | 104 | 0 | 63.76 | 42.98 | 0.00 |
| MPDNN | 239 | 45 | 3 | 0 | 98.95 | 1.24 | 0.00 |
表9 同源模型的对比实验数值统计结果
Tab. 9 Numerical statistical results of comparison experiments of homologous models
| 模型 | 帧数 | ACC/% | FNR/% | FPR/% | |||
|---|---|---|---|---|---|---|---|
| TP | TN | FN | FP | ||||
| CDNN[ | 0 | 45 | 242 | 0 | 15.68 | 100.00 | 0.00 |
| CEBDNN[ | 0 | 45 | 242 | 0 | 15.68 | 100.00 | 0.00 |
| DSNN[ | 124 | 45 | 118 | 124 | 41.12 | 48.76 | 43.21 |
| STPDNN[ | 138 | 45 | 104 | 0 | 63.76 | 42.98 | 0.00 |
| MPDNN | 239 | 45 | 3 | 0 | 98.95 | 1.24 | 0.00 |
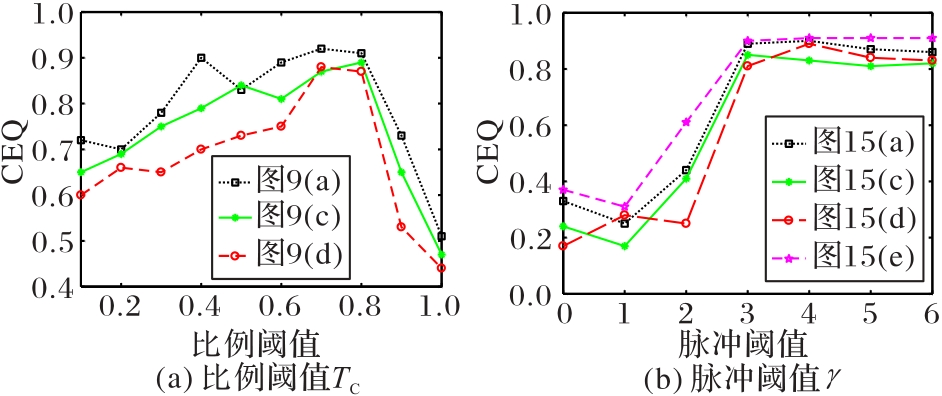
图18 MPDNN参数的灵敏度分析
Fig. 18 Sensitivity analysis of MPDNN parameters
| 1 | BRUNETTI A, BUONGIORNO D, TROTTA G F, et al. Computer vision and deep learning techniques for pedestrian detection and tracking: a survey[J]. Neurocomputing, 2018, 300: 17-33. |
| 2 | DiCARLO J J, ZOCCOLAN D, RUST N C. How does the brain solve visual object recognition?[J]. Neuron, 2012, 73(3): 415-434. |
| 3 | ELDER J H. Shape from contour: computation and representation[J]. Annual Review of Vision Science, 2018, 4: 423-450. |
| 4 | AYZENBERG V, LOURENCO S. Perception of an object’s global shape is best described by a model of skeletal structure in human infants[J]. eLife, 2022, 11: No.e74943. |
| 5 | BAKER N, LU H, ERLIKHMAN G, et al. Deep convolutional networks do not make classifications based on global object shape[J]. Journal of Vision, 2018, 18(10): No.904. |
| 6 | WOOD J N, WOOD S M W. The development of invariant object recognition requires visual experience with temporally smooth objects[J]. Cognitive Science, 2018, 42(4): 1391-1406. |
| 7 | EL-SHAMAYLEH Y, PASUPATHY A. Contour curvature as an invariant code for objects in visual area V4[J]. Journal of Neuroscience, 2016, 36(20): 5532-5543. |
| 8 | HU B, ZHANG Z, LI L. LGMD-based visual neural network for detection crowd escape behavior[C]// Proceedings of the 5th IEEE International Conference on Cloud Computing and Intelligence Systems. Piscataway: IEEE, 2018: 772-778. |
| 9 | FU Q, WANG H, HU C, et al. Towards computational models and applications of insect visual systems for motion perception: a review[J]. Artificial Life, 2019, 25(3): 263-311. |
| 10 | HU B, ZHANG Z. Bio-inspired visual neural network on spatio-temporal depth rotation perception[J]. Neural Computing and Applications, 2021, 33(16): 10351-10370. |
| 11 | HUANG X, QIAO H, LI H, et al. Bioinspired approach-sensitive neural network for collision detection in cluttered and dynamic backgrounds[J]. Applied Soft Computing, 2022, 122: No.108782. |
| 12 | 张本康,胡滨. 基于情景记忆的运动小目标行人检测神经网络[J]. 计算机工程与应用, 2022, 58(15): 169-183. |
| ZHANG B K, HU B. Neural network for moving small target pedestrian detection based on episodic memory[J]. Computer Engineering and Applications, 2022, 58(15): 169-183. | |
| 13 | LAD B V, HASHMI M F, KESKAR A G. Parameter adaptive pulse coupled neural network-based saliency map fusion strategy for salient object detection[J]. Neural Computing and Applications, 2023, 35(21): 15743-15757. |
| 14 | CAO J, PANG Y, XIE J, et al. From handcrafted to deep features for pedestrian detection: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(9): 4913-4934. |
| 15 | VARGA D, HAVASI L, SZIRÁNYI T. Pedestrian detection in surveillance videos based on CS-LBP feature[C]// Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems. Piscataway: IEEE, 2015: 413-417. |
| 16 | NAN M, LI C, HU J, et al. Pedestrian detection based on HOG features and SVM realizes vehicle-human-environment interaction[C]// Proceedings of the 15th International Conference on Computational Intelligence and Security. Piscataway: IEEE, 2019: 287-291. |
| 17 | DONG E, JING C, ZHANG Z. A multi-feature fusion based pedestrian detection method[C]// Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation. Piscataway: IEEE, 2020: 176-180. |
| 18 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 19 | CAI Z, VASCONCELOS N. Cascade R-CNN: high quality object detection and instance segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(5): 1483-1498. |
| 20 | Ultralytics. YOLOv5[EB/OL]. [2024-07-10].. |
| 21 | Ultralytics. YOLOv8[EB/OL]. [2024-07-10].. |
| 22 | ZHOU S, QIU J. Enhanced SSD with interactive multi-scale attention features for object detection[J]. Multimedia Tools and Applications, 2021, 80(8): 11539-11556. |
| 23 | GAWANDE U, HAJARI K, GOLHAR Y. SIRA: scale illumination rotation affine invariant mask R-CNN for pedestrian detection[J]. Applied Intelligence, 2022, 52: 10398-10416. |
| 24 | KOLLURI J, DAS R. Intelligent multimodal pedestrian detection using hybrid metaheuristic optimization with deep learning model[J]. Image and Vision Computing, 2023, 131: No.104628. |
| 25 | KHAN A H, MUNIR M, VAN ELST L, et al. F2DNet: fast focal detection network for pedestrian detection[C]// Proceedings of the 26th International Conference on Pattern Recognition. Piscataway: IEEE, 2022: 4658-4664. |
| 26 | ZHAO K, DENG J, CHENG D. Real-time moving pedestrian detection using contour features[J]. Multimedia Tools and Applications, 2018, 77(23): 30891-30910. |
| 27 | JIANG Y, WANG J, LIANG Y, et al. Combining static and dynamic features for real-time moving pedestrian detection[J]. Multimedia Tools and Applications, 2019, 78(3): 3781-3795. |
| 28 | CHENG G, ZHENG J Y. Semantic segmentation for pedestrian detection from motion in temporal domain[C]// Proceedings of the 2020 25th International Conference on Pattern Recognition. Piscataway: IEEE, 2021: 6897-6903. |
| 29 | KILICARSLAN M, ZHENG J Y. DeepStep: direct detection of walking pedestrian from motion by a vehicle camera[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1652-1663. |
| 30 | YANG P, ZHANG G, WANG L, et al. A part-aware multi-scale fully convolutional network for pedestrian detection[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(2): 1125-1137. |
| 31 | KIM M, ILYAS N, KIM K. AMSASeg: an attention-based multi-scale atrous convolutional neural network for real-time object segmentation from 3D point cloud[J]. IEEE Access, 2021, 9: 70789-70796. |
| 32 | HE Y, HE N, YU H, et al. From macro to micro: rethinking multi-scale pedestrian detection[J]. Multimedia Systems, 2023, 29(3): 1417-1429. |
| 33 | LIU M, JIANG J, ZHU C, et al. VLPD: context-aware pedestrian detection via vision-language semantic self-supervision[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 6662-6671. |
| 34 | HASAN I, LIAO S, LI J, et al. Generalizable pedestrian detection: the elephant in the room[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11323-11332. |
| 35 | SHEN G, YU Y, TANG Z R, et al. HQA‐Trans: an end‐to‐end high‑quality‑awareness image translation framework for unsupervised cross‑domain pedestrian detection[J]. IET Computer Vision, 2022, 16(3): 218-229. |
| 36 | CAI Y, ZHANG B, LI B, et al. Rethinking cross-domain pedestrian detection: a background-focused distribution alignment framework for instance-free one-stage detectors[J]. IEEE Transactions on Image Processing, 2023, 32: 4935-4950. |
| 37 | ROUPA I, SILVA M R DA, MARQUES F, et al. On the modeling of biomechanical systems for human movement analysis: a narrative review[J]. Archives of Computational Methods in Engineering, 2022, 29(7): 4915-4958. |
| 38 | AUBRET A, TEULIÈR C, TRIESCH J. Toddler-inspired embodied vision for learning object representations[C]// Proceedings of the 2022 IEEE International Conference on Development and Learning. Piscataway: IEEE, 2022: 81-87. |
| 39 | ISIK L, MEYERS E M, LEIBO J Z, et al. The dynamics of invariant object recognition in the human visual system[J]. Journal of Neurophysiology, 2014, 111(1): 91-102. |
| 40 | ZOCCOLAN D. Invariant visual object recognition and shape processing in rats[J]. Behavioural Brain Research, 2015, 285: 10-33. |
| 41 | WOOD J N, WOOD S M W. One-shot learning of view-invariant object representations in newborn chicks[J]. Cognition, 2020, 199: No.104192. |
| 42 | PRASAD A, WOOD S M W, WOOD J N. Using automated controlled rearing to explore the origins of object permanence[J]. Developmental Science, 2019, 22(3): No.e12796. |
| 43 | JIAO L, YANG Y, LIU F, et al. The new generation brain-inspired sparse learning: a comprehensive survey[J]. IEEE Transactions on Artificial Intelligence, 2022, 3(6): 887-907. |
| 44 | JOHANSSON G. Visual perception of biological motion and a model for its analysis[J]. Perception and Psychophysics, 1973, 14(2): 201-211. |
| 45 | CARLSON E T, RASQUINHA R J, ZHANG K, et al. A sparse object coding scheme in area V4[J]. Current Biology, 2011, 21(4): 288-293. |
| 46 | VLASITS A L, EULER T, FRANKE K. Function first: classifying cell types and circuits of the retina[J]. Current Opinion in Neurobiology, 2019, 56: 8-15. |
| 47 | HAHN J, MONAVARFESHANI A, QIAO M, et al. Evolution of neuronal cell classes and types in the vertebrate retina[J]. Nature, 2023, 624(7991): 415-424. |
| 48 | SETYOKO B H, NOERSASONGKO E, SHIDIK G F, et al. Gaussian mixture model in dynamic background of video sequences for human detection[C]// Proceedings of the 5th International Conference on Research of Information Technology and Intelligent Systems. Piscataway: IEEE, 2022: 595-600. |
| 49 | GAYNES J A, BUDOFF S A, GRYBKO M J, et al. Classical center-surround receptive fields facilitate novel object detection in retinal bipolar cells[J]. Nature Communications, 2022, 13: No.5575. |
| 50 | 刘倡,胡滨. 生物启发的人群突发局部聚集感知神经网络[J]. 计算机工程与应用, 2022, 58(16): 164-174. |
| LIU C, HU B. Bio-inspired neural network for perceiving suddenly localized crowd gathering[J]. Computer Engineering and Applications, 2022, 58(16): 164-174. | |
| 51 | GARCIA-MOLLA V M, ALONSO-JORDÁ P. Parallel border tracking in binary images for multicore computers[J]. The Journal of Supercomputing, 2023, 79(9): 9915-9931. |
| 52 | PENG P, TIAN Y, WANG Y, et al. Robust multiple cameras pedestrian detection with multi-view Bayesian network[J]. Pattern Recognition, 2015, 48(5): 1760-1772. |
| 53 | LU C, SHI J, JIA J. Abnormal event detection at 150 FPS in MATLAB[C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 2720-2727. |
| 54 | VIDEEZ Y. Shot of a seagull flying with blue sky on background in 4K[EB/OL]. [2024-07-10].. |
| 55 | WANG Y, LI H, ZHENG Y, et al. A directionally selective collision-sensing visual neural network based on fractional-order differential operator[J]. Frontiers in Neurorobotics, 2023, 17: No.1149675. |
| [1] | 侯阳, 张琼, 赵紫煊, 朱正宇, 张晓博. 基于YOLOv5s的复杂场景下高效烟火检测算法YOLOv5s-MRD[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1317-1324. |
| [2] | 张李伟, 梁泉, 胡禹涛, 朱乔乐. 基于分组卷积的通道重洗注意力机制[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1069-1076. |
| [3] | 张传浩, 屠晓涵, 谷学汇, 轩波. 基于多模态信息相互引导补充的雷达-相机三维目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 946-952. |
| [4] | 余松森, 林智凡, 薛国鹏, 徐建宇. 基于改进YOLOv8的轻量级大幅面瓷砖缺陷检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 647-654. |
| [5] | 洪梓榕, 包广清. 基于集成学习的雷达自动目标识别综述[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 371-382. |
| [6] | 杨晟, 李岩. 面向目标检测的对比知识蒸馏方法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 354-361. |
| [7] | 桂佳扬, 王顺吉, 周正康, 唐加山. 基于改进YOLOv8n的隧道内异物检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 655-661. |
| [8] | 文诗佳, 金世俊. 结合目标检测和特征点关联的动态视觉SLAM算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 610-615. |
| [9] | 张众维, 王俊, 刘树东, 王志恒. 多尺度特征融合与加权框融合的遥感图像目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 633-639. |
| [10] | 何秋润, 胡节, 彭博, 李天源. 基于上下文信息的多尺度特征融合织物疵点检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 640-646. |
| [11] | 杨博然, 蔺素珍, 李大威, 禄晓飞, 崔晨辉. 基于信息补偿的红外弱小目标检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 284-291. |
| [12] | 刘赏, 周煜炜, 代娆, 董林芳, 刘猛. 融合注意力和上下文信息的遥感图像小目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 292-300. |
| [13] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [14] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [15] | 张英俊, 李牛牛, 谢斌红, 张睿, 陆望东. 课程学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2326-2333. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||