


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (9): 3026-3035.DOI: 10.11772/j.issn.1001-9081.2024091273
• 前沿与综合应用 • 上一篇
古松健1,2, 吴福祥2, 高向阳2, 杨梦杰3, 詹忆冰4, 程俊2( )
)
收稿日期:2024-09-06
修回日期:2024-11-29
接受日期:2024-12-02
发布日期:2025-01-15
出版日期:2025-09-10
通讯作者:
程俊
作者简介:古松健(1998—),男,广东茂名人,硕士研究生,主要研究方向:移动机器人控制、嵌入式系统基金资助:
Songjian GU1,2, Fuxiang WU2, Xiangyang GAO2, Mengjie YANG3, Yibing ZHAN4, Jun CHENG2()
Received:2024-09-06
Revised:2024-11-29
Accepted:2024-12-02
Online:2025-01-15
Published:2025-09-10
Contact:
Jun CHENG
About author:GU Songjian, born in 1998, M.S. candidate. His research interests include mobile robot control, embedded systems.Supported by:摘要:
针对轮式移动机器人(WMR)在轨迹跟踪过程中因定位失准和未知干扰等因素导致的位姿偏移问题,提出一种基于几何模型预测控制(GMPC)的增强型粒子群优化混合器(EPSO-Mixer)算法,旨在提升WMR的轨迹跟踪性能。首先,以粒子群优化(PSO)为基础,提出一种增强型粒子群优化(EPSO)算法,以加快收敛并提升优化能力;其次,利用EPSO对GMPC进行改进,根据当前偏移程度筛选出最优跟踪参数,以有效地减小轨迹跟踪误差;最后,结合混合多层感知器(MLP-Mixer)架构,提出EPSO-Mixer算法,从而进一步增强对全局最优解的搜索能力,同时生成更具适应性的控制策略。仿真实验结果表明,与非线性模型预测控制和经典GMPC算法相比,EPSO-Mixer GMPC有效提升了WMR在位姿偏移条件下的轨迹跟踪性能,误差减小8.0%~82.3%,并显著改善了运动中的振动问题。可见,EPSO-Mixer算法能够提供更有效的控制策略,不仅降低了参数调整的难度与时间成本,而且显著增强了轨迹跟踪控制的自适应能力。
中图分类号:
古松健, 吴福祥, 高向阳, 杨梦杰, 詹忆冰, 程俊. 基于几何模型预测控制的移动机器人轨迹跟踪算法[J]. 计算机应用, 2025, 45(9): 3026-3035.
Songjian GU, Fuxiang WU, Xiangyang GAO, Mengjie YANG, Yibing ZHAN, Jun CHENG. Trajectory tracking algorithm for mobile robots based on geometric model predictive control[J]. Journal of Computer Applications, 2025, 45(9): 3026-3035.
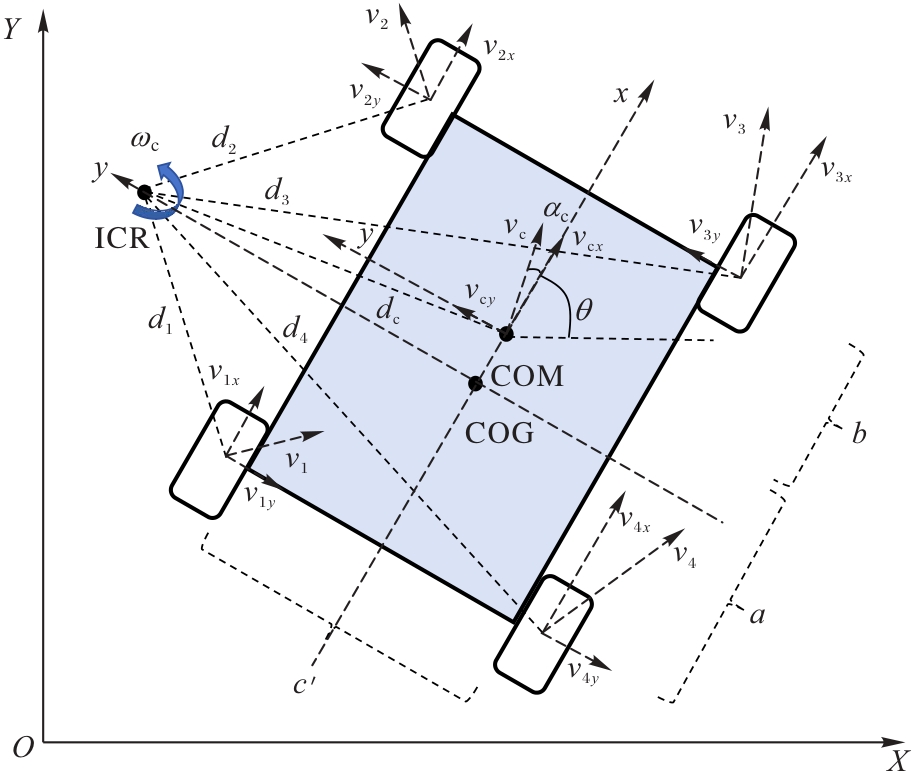
图1 FWDMR的运动模型
Fig. 1 Kinematics model of FWDMR
| 符号 | 意义 |
|---|---|
| n维向量空间 | |
| 二维空间中的特殊欧几里得群 | |
| 与 | |
| 刚体在平面中移动的状态向量 | |
| 刚体在平面中移动的参考状态向量 | |
| 刚体在平面中移动的速度向量 | |
| 李代数中的速度元素 | |
| 控制输入 | |
| 与 | |
表1 GMPC框架中所运用到的符号及其意义
Tab. 1 Symbols used in GMPC framework and their meanings
| 符号 | 意义 |
|---|---|
| n维向量空间 | |
| 二维空间中的特殊欧几里得群 | |
| 与 | |
| 刚体在平面中移动的状态向量 | |
| 刚体在平面中移动的参考状态向量 | |
| 刚体在平面中移动的速度向量 | |
| 李代数中的速度元素 | |
| 控制输入 | |
| 与 | |
| 调整时段 | ||
|---|---|---|
| 探索阶段 | 大幅增加 | 大幅减小 |
| 开发阶段 | 小幅增加 | 小幅减小 |
| 收敛阶段 | 小幅增加 | 小幅减小 |
| 结束阶段 | 大幅减小 | 大幅增加 |
表2 加速因子的更新规则
Tab. 2 Rules for updating acceleration factors
| 调整时段 | ||
|---|---|---|
| 探索阶段 | 大幅增加 | 大幅减小 |
| 开发阶段 | 小幅增加 | 小幅减小 |
| 收敛阶段 | 小幅增加 | 小幅减小 |
| 结束阶段 | 大幅减小 | 大幅增加 |
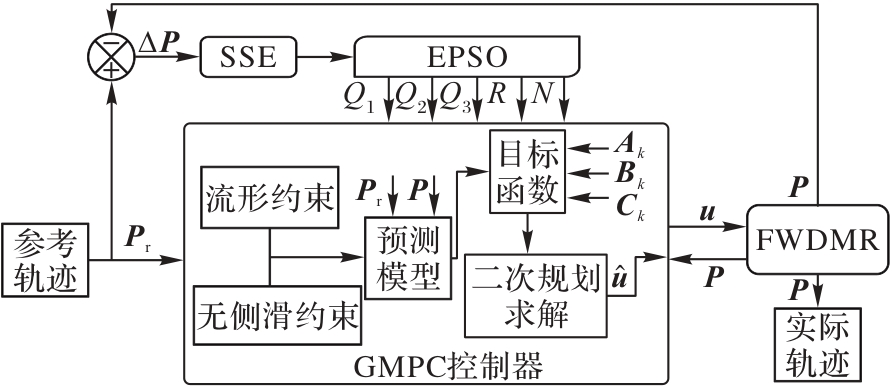
图2 EPSO-GMPC算法的原理
Fig. 2 Principle of EPSO-GMPC algorithm
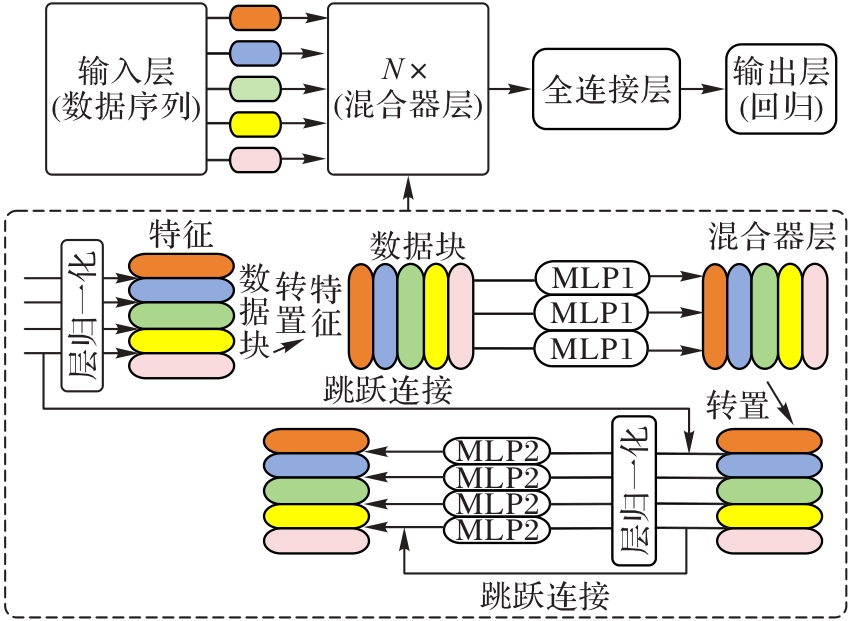
图3 Mixer算法的结构
Fig. 3 Mixer algorithm structure
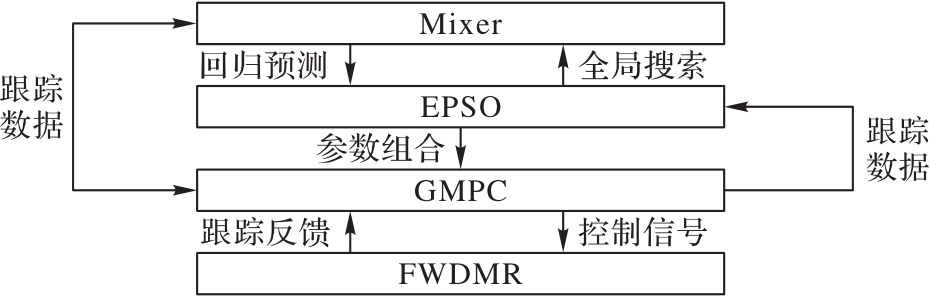
图4 EPSO-Mixer轨迹跟踪算法的框架
Fig. 4 Framework of EPSO-Mixer trajectory tracking algorithm
| 参数 | 含义 | 数值 |
|---|---|---|
| 未知(决策)变量的数量 | 5 | |
| 粒子数 | 50 | |
| 认知加速因子初始值 | 2 | |
| 社会加速因子初始值 | 2 | |
| 最大迭代次数 | 50或100 | |
| 惯性权重最大值 | 0.99 | |
| 惯性权重最小值 | 0.1 | |
| 阻尼因子 | 0.99 |
表3 PSO参数设置
Tab. 3 PSO parameter setting
| 参数 | 含义 | 数值 |
|---|---|---|
| 未知(决策)变量的数量 | 5 | |
| 粒子数 | 50 | |
| 认知加速因子初始值 | 2 | |
| 社会加速因子初始值 | 2 | |
| 最大迭代次数 | 50或100 | |
| 惯性权重最大值 | 0.99 | |
| 惯性权重最小值 | 0.1 | |
| 阻尼因子 | 0.99 |
| 算法 | 最大迭代次数 | 最佳适应度 |
|---|---|---|
| 经典PSO | 50 | 4.65×10-3 |
| 100 | 1.70×10-4 | |
| 文献[ | 50 | 3.80×10-2 |
| 100 | 4.04×10-3 | |
| 文献[ | 50 | 7.69×10-2 |
| 100 | 3.39×10-4 | |
| 文献[ | 50 | 1.11×10-5 |
| 100 | 7.11×10-8 | |
| EPSO | 50 | 1.89×10-11 |
| 100 | 1.32×10-20 |
表4 不同算法的最大迭代次数和最佳适应度的对比
Tab. 4 Comparison of maximum iteration numbers and best fitness values of different algorithms
| 算法 | 最大迭代次数 | 最佳适应度 |
|---|---|---|
| 经典PSO | 50 | 4.65×10-3 |
| 100 | 1.70×10-4 | |
| 文献[ | 50 | 3.80×10-2 |
| 100 | 4.04×10-3 | |
| 文献[ | 50 | 7.69×10-2 |
| 100 | 3.39×10-4 | |
| 文献[ | 50 | 1.11×10-5 |
| 100 | 7.11×10-8 | |
| EPSO | 50 | 1.89×10-11 |
| 100 | 1.32×10-20 |
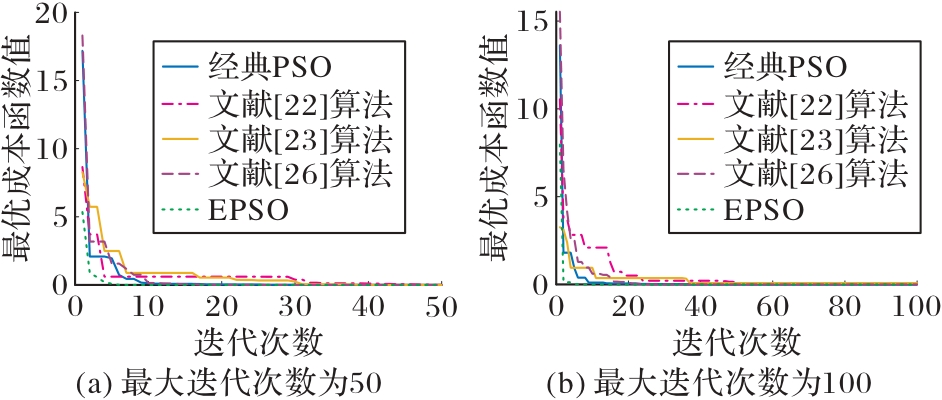
图5 各PSO算法对球体函数的优化结果
Fig. 5 Optimization results of PSO algorithms for spherical functions
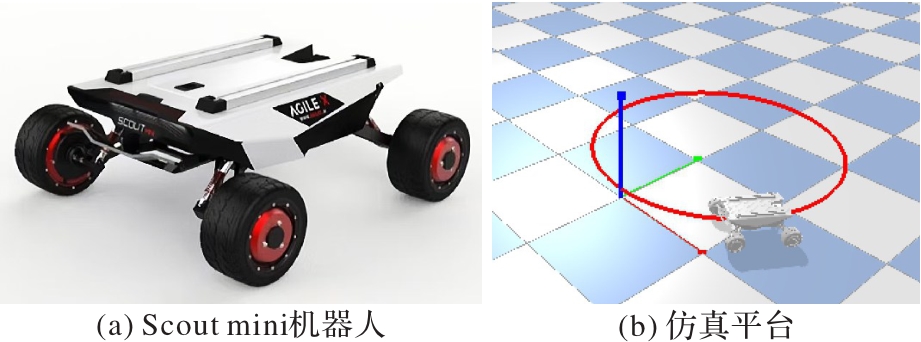
图6 仿真对象以及仿真平台界面
Fig. 6 Simulation object and simulation platform interface
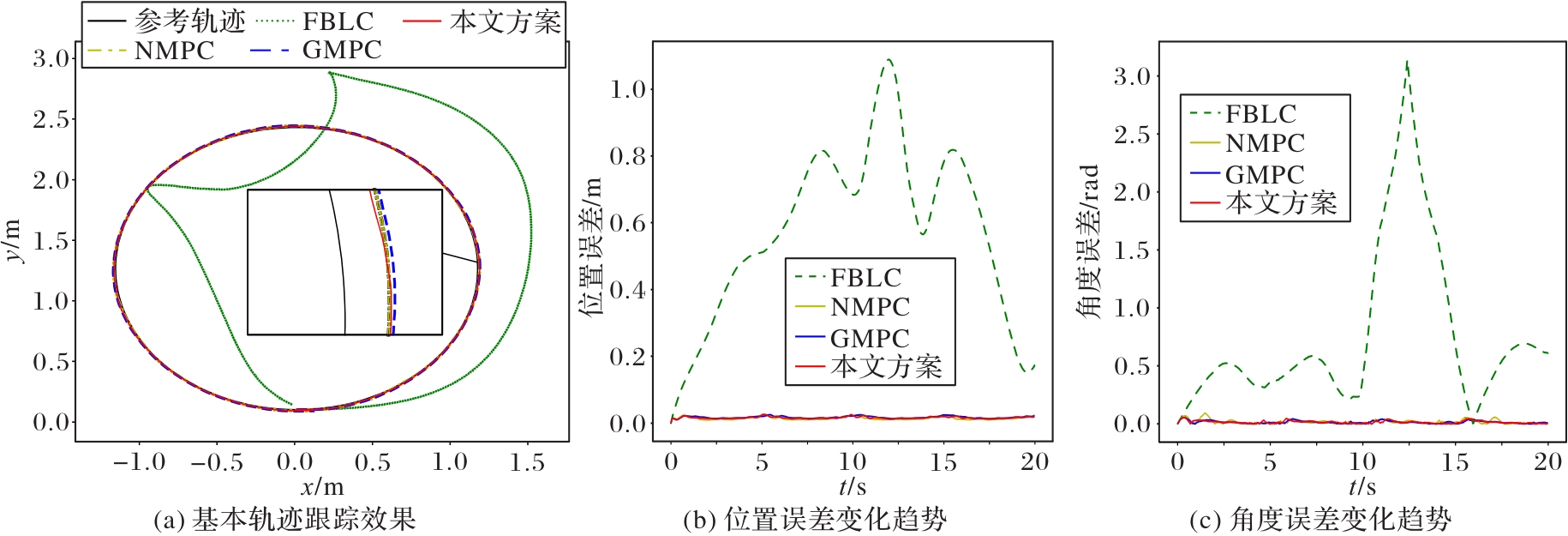
图7 常规情况下各控制方案的圆形轨迹跟踪表现
Fig. 7 Tracking performance of various control schemes under conventional condition for circular trajectory
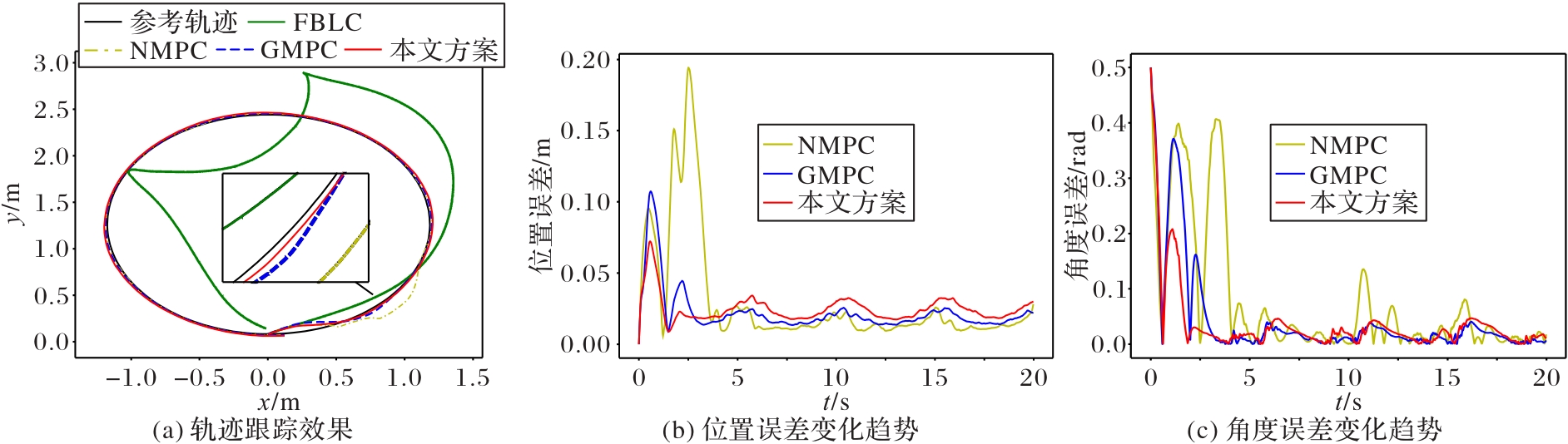
图8 30°航向偏移情况下各控制方案的圆形轨迹跟踪表现
Fig. 8 Tracking performance of various control schemes under 30 ° course shift for circular trajectory
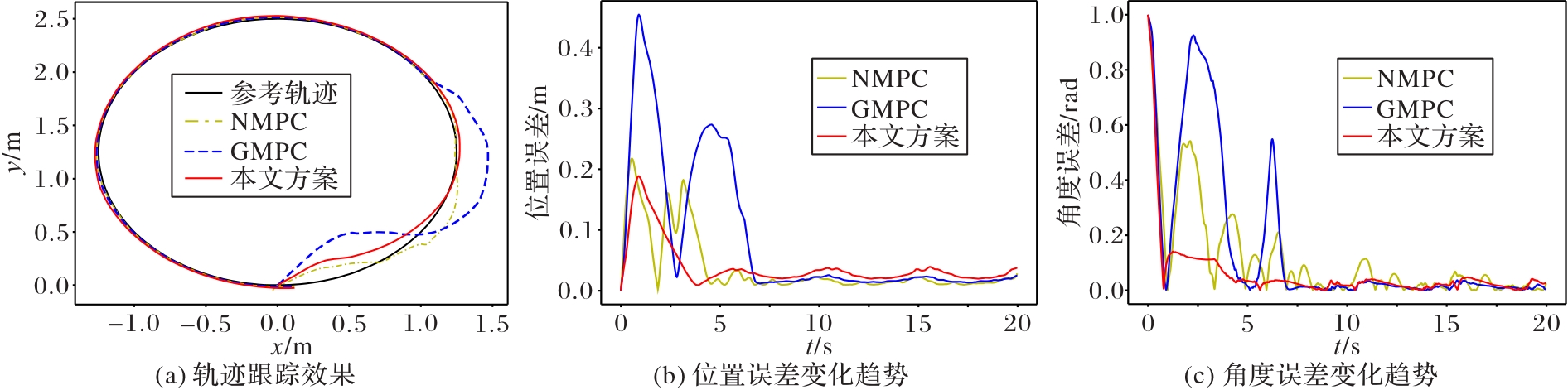
图9 60°航向偏移情况下各控制方案的圆形轨迹跟踪表现
Fig. 9 Tracking performance of various control schemes under 60 ° course shift for circular trajectory
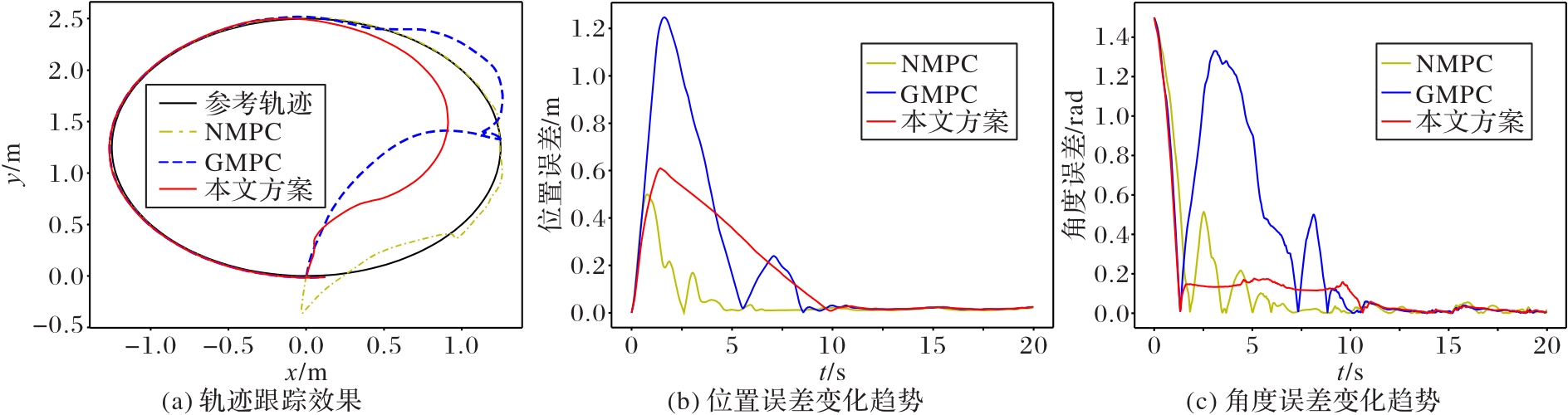
图10 90°航向偏移情况下各控制方案的圆形轨迹跟踪表现
Fig. 10 Tracking performance of various control schemes under 90 ° course shift for circular trajectory
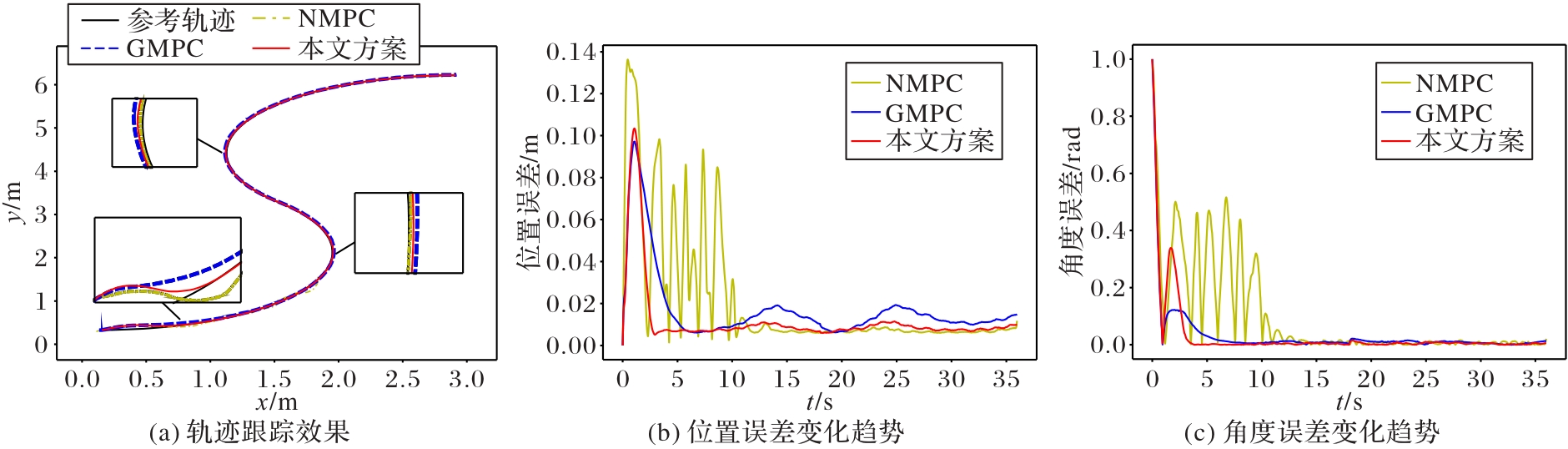
图11 60°航向偏移情况下各控制方案的S形轨迹跟踪表现
Fig. 11 Tracking performance of various control schemes under 60° course shift for S-shaped trajectory
| 算法 | Q1 | Q2 | Q3 | R | N | SSE | 提升/% |
|---|---|---|---|---|---|---|---|
| BPNN | 19 256 | 15 593 | 1 901 | 0.4 | 17 | 3.464 | 29.7 |
| GA | 22 438 | 19 848 | 2 298 | 0.3 | 15 | 3.275 | 33.6 |
| EPSO | 22 611 | 15 597 | 2 462 | 0.2 | 18 | 3.134 | 36.4 |
| XGBoost[ | 24 445 | 20 438 | 2 410 | 0.5 | 15 | 3.785 | 23.2 |
| gMLP[ | 19 807 | 17 758 | 2 470 | 0.9 | 14 | 3.332 | 30.0 |
| TabNet[ | 22 916 | 14 652 | 2 417 | 0.1 | 14 | 3.389 | 31.3 |
| EPSO-Mixer | 23 606 | 15 325 | 2 446 | 0.6 | 18 | 2.894 | 41.3 |
表5 各算法优化结果对比
Tab. 5 Comparison of optimization results of different algorithms
| 算法 | Q1 | Q2 | Q3 | R | N | SSE | 提升/% |
|---|---|---|---|---|---|---|---|
| BPNN | 19 256 | 15 593 | 1 901 | 0.4 | 17 | 3.464 | 29.7 |
| GA | 22 438 | 19 848 | 2 298 | 0.3 | 15 | 3.275 | 33.6 |
| EPSO | 22 611 | 15 597 | 2 462 | 0.2 | 18 | 3.134 | 36.4 |
| XGBoost[ | 24 445 | 20 438 | 2 410 | 0.5 | 15 | 3.785 | 23.2 |
| gMLP[ | 19 807 | 17 758 | 2 470 | 0.9 | 14 | 3.332 | 30.0 |
| TabNet[ | 22 916 | 14 652 | 2 417 | 0.1 | 14 | 3.389 | 31.3 |
| EPSO-Mixer | 23 606 | 15 325 | 2 446 | 0.6 | 18 | 2.894 | 41.3 |
| [1] | PANAHANDEH P, ALIPOUR K, TARVIRDIZADEH B, et al. A self-tuning trajectory tracking controller for wheeled mobile robots[J]. Industrial Robot, 2019, 46(6): 828-838. |
| [2] | LI L, CAO W, YANG H, et al. Trajectory tracking control for a wheel mobile robot on rough and uneven ground [J]. Mechatronics, 2022, 83: No.102741. |
| [3] | 徐俊艳,张培仁. 非完整轮式移动机器人轨迹跟踪控制研究[J]. 中国科学技术大学学报, 2004, 34(3):121-125. |
| XU J Y, ZHANG P R. Research on trajectory tracking control of nonholonomic wheeled mobile robots [J]. Journal of University of Science and Technology of China, 2004, 34(3):121-125. | |
| [4] | DE WIT C C, SORDALEN O J. Exponential stabilization of mobile robots with nonholonomic constraints [C]// Proceedings of the 30th IEEE Conference on Decision and Control — Volume 1. Piscataway: IEEE, 1991: 692-697. |
| [5] | WALLACE R, STENTZ A, THORPE C, et al. First results in robot road-following [C]// Proceedings of the 9th International Joint Conference on Artificial Intelligence — Volume 2. San Francisco: Morgan Kaufmann Publishers Inc., 1985: 1089-1095. |
| [6] | 张扬名,刘国荣,刘洞波,等. 基于Lyapunov方法和快速终端滑模的轨迹跟踪控制[J]. 计算机应用, 2012, 32(11):3243-3246. |
| ZHANG Y M, LIU G R, LIU D B, et al. Trajectory tracking control based on Lyapunov method and terminal sliding mode [J]. Journal of Computer Applications, 2012, 32(11):3243-3246. | |
| [7] | BEGNINI M, BERTOL D W, MARTINS N A. A robust adaptive fuzzy variable structure tracking control for the wheeled mobile robot: simulation and experimental results [J]. Control Engineering Practice, 2017, 64:27-43. |
| [8] | 郑伟勇,李艳玮. 基于前馈-反馈的移动机器人轨迹跟踪控制[J]. 计算机工程与设计, 2017, 38(2):539-543. |
| ZHENG W Y, LI Y W. Trajectory tracking of wheeled mobile robot based on feed-forward and feedback controller [J]. Computer Engineering and Design, 2017, 38(2):539-543. | |
| [9] | 罗蕊,师五喜,李宝全. 受侧滑和滑移影响的移动机器人自抗扰控制[J]. 计算机应用, 2018, 38(5):1517-1522. |
| LUO R, SHI W X, LI B Q. Active disturbance rejection control for mobile robot with skidding and slipping [J]. Journal of Computer Applications, 2018, 38(5):1517-1522. | |
| [10] | 胡映,陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 计算机应用, 2024, 44(7):2294-2300. |
| HU Y, CHEN Z H. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7):2294-2300. | |
| [11] | BOUKENS M, BOUKABOU A. Design of an intelligent optimal neural network-based tracking controller for nonholonomic mobile robot systems [J]. Neurocomputing, 2017, 226: 46-57. |
| [12] | ORIOLO G, DE LUCA A, VENDITTELLI M. WMR control via dynamic feedback linearization: design, implementation, and experimental validation [J]. IEEE Transactions on Control Systems Technology, 2002, 10(6): 835-852. |
| [13] | 李华夏,黄晓蓉,沈安林,等. 基于MPC和PID的脚轮式全向移动平台轨迹跟踪 [J]. 计算机应用, 2024, 44(7):2285-2293. |
| LI H X, HUANG X R, SHEN A L, et al. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID [J]. Journal of Computer Applications, 2024, 44(7):2285-2293. | |
| [14] | BAI G, LIU L, MENG Y, et al. Path tracking of wheeled mobile robots based on dynamic prediction model [J]. IEEE Access, 2019, 7: 39690-39701. |
| [15] | JIAN Z, YAN Z, LEI X, et al. Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot [C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2023: 3679-3685. |
| [16] | WANG K, XU Z, ZHANG K, et al. Lattice piecewise affine approximation of explicit nonlinear model predictive control with application to trajectory tracking of mobile robot [J]. IET Control Theory and Applications, 2024, 18(2): 149-159. |
| [17] | WANG H, LIU B, PING X, et al. Path tracking control for autonomous vehicles based on an improved MPC [J]. IEEE Access, 2019, 7: 161064-161073. |
| [18] | MOUMOUH H, LANGLOIS N, HADDAD M. A novel tuning approach for MPC parameters based on artificial neural network[C]// Proceedings of the IEEE 15th International Conference on Control and Automation. Piscataway: IEEE, 2019: 1638-1643. |
| [19] | RAMASAMY V, SIDHARTHAN R K, KANNAN R, et al. Optimal tuning of model predictive controller weights using genetic algorithm with interactive decision tree for industrial cement kiln process [J]. Processes, 2019, 7(12): No.938. |
| [20] | TANG J, WU S, LAN B, et al. GMPC: geometric model predictive control for wheeled mobile robot trajectory tracking [J]. IEEE Robotics and Automation Letters, 2024, 9(5): 4822-4829. |
| [21] | ARSLAN S, TEMELTAŞ H. Robust motion control of a four wheel drive skid-steered mobile robot [C]// Proceedings of the 7th International Conference on Electrical and Electronics Engineering. Piscataway: IEEE, 2011: Ⅱ-415-Ⅱ-419. |
| [22] | SHI Y, EBERHART R. A modified particle swarm optimizer [C]// Proceedings of the 1998 IEEE International Conference on Evolutionary Computation IEEE World Congress on Computational Intelligence. Piscataway: IEEE, 1998: 69-73. |
| [23] | ZHAN Z H, ZHANG J, LI Y, et al. Adaptive particle swarm optimization [J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2009, 39(6): 1362-1381. |
| [24] | LEE J M. Introduction to Riemannian manifolds, GTM 176 [M]. Cham: Springer, 2018. |
| [25] | TOLSTIKHIN I, HOULSBY N, KOLESNIKOV A, et al. MLP-Mixer: an all-MLP architecture for vision [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 24261-24272. |
| [26] | KEBBATI Y, PUIG V, AIT-OUFROUKH N, et al. Optimized adaptive MPC for lateral control of autonomous vehicles [C]// Proceedings of the 9th International Conference on Control, Mechatronics and Automation. Piscataway: IEEE, 2021: 95-103. |
| [27] | CHEN T, GUESTRIN C. XGBoost: a scalable tree boosting system [C]// Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. New York: ACM, 2016: 785-794. |
| [28] | LIU H, DAI Z, SO D R, et al. Pay attention to MLPs [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 9204-9215. |
| [29] | ARIK S Ö, PFISTER T. TabNet: attentive interpretable tabular learning [C]// Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021: 6679-6687. |
| [1] | 吴素谦, 闫建国, 杨斌, 覃涛, 刘影, 杨靖. 多策略改进的天鹰优化器及其在路径规划中的应用[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 937-945. |
| [2] | 高培根, 锁斌. 基于加权犹豫模糊集的实验设计与分阶段PSO-Kriging建模[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2144-2150. |
| [3] | 胡映, 陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2294-2300. |
| [4] | 李华夏, 黄晓蓉, 沈安林, 蒋鹏, 彭忆强, 隋立起. 基于MPC和PID的脚轮式全向移动平台轨迹跟踪[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2285-2293. |
| [5] | 刘晓芳, 张军. 概率驱动的动态多目标多智能体协同调度进化优化[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1372-1377. |
| [6] | 杜晓昕, 周薇, 王浩, 郝田茹, 王振飞, 金梅, 张剑飞. 智能算法的亚群优化策略综述[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 819-830. |
| [7] | 王震, 张珊珊, 邬斌扬, 苏万华. 基于自适应粒子群优化算法的串联复合涡轮储能优化策略[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 611-618. |
| [8] | 梁军, 洪泽泓, 余松森. 基于改进粒子群优化算法和遗传变异的图像分割模型[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1743-1749. |
| [9] | 高智慧, 韩萌, 刘淑娟, 李昂, 穆栋梁. 基于智能优化算法的高效用项集挖掘方法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1676-1686. |
| [10] | 于振华, 刘争气, 刘颖, 郭城. 基于自适应混合粒子群优化的软件缺陷预测特征选择方法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1206-1213. |
| [11] | 马学森, 许雪梅, 蒋功辉, 乔焰, 周天保. 混合自适应粒子群工作流调度优化算法[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 474-483. |
| [12] | 王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823. |
| [13] | 柳春锋, 李峥, 王居凤. 分布式工厂中微型制造单元多目标优化[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3824-3832. |
| [14] | 盖荣丽, 高守传, 李明霞. 粒子群优化算法求解最优控制点的非均匀有理B样条曲线拟合[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2177-2183. |
| [15] | 高兵, 郑雅, 秦静, 邹启杰, 汪祖民. 基于麻雀搜索算法和改进粒子群优化算法的网络入侵检测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(4): 1201-1206. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||