


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (5): 1686-1693.DOI: 10.11772/j.issn.1001-9081.2024111686
• Multimedia computing and computer simulation • Previous Articles
Lu CHEN1,2, Huaiyao WANG1,2, Jingyang LIU1,2, Tao YAN1,2( ), Bin CHEN3,4,5
), Bin CHEN3,4,5
Received:2024-12-02
Revised:2025-01-27
Accepted:2025-02-12
Online:2025-02-14
Published:2025-05-10
Contact:
Tao YAN
About author:CHEN Lu, born in 1991, Ph. D., associated professor. His research interests include robotic grasping, image enhancement.Supported by:
陈路1,2, 王怀瑶1,2, 刘京阳1,2, 闫涛1,2(), 陈斌3,4,5
通讯作者:
闫涛
作者简介:陈路(1991—),男,山东聊城人,副教授,博士,CCF会员,主要研究方向:机器人抓取、图像增强基金资助:CLC Number:
Lu CHEN, Huaiyao WANG, Jingyang LIU, Tao YAN, Bin CHEN. Robotic grasp detection with feature fusion of spatial-Fourier domain information under low-light environments[J]. Journal of Computer Applications, 2025, 45(5): 1686-1693.
陈路, 王怀瑶, 刘京阳, 闫涛, 陈斌. 融合空间-傅里叶域信息的机器人低光环境抓取检测[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1686-1693.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024111686
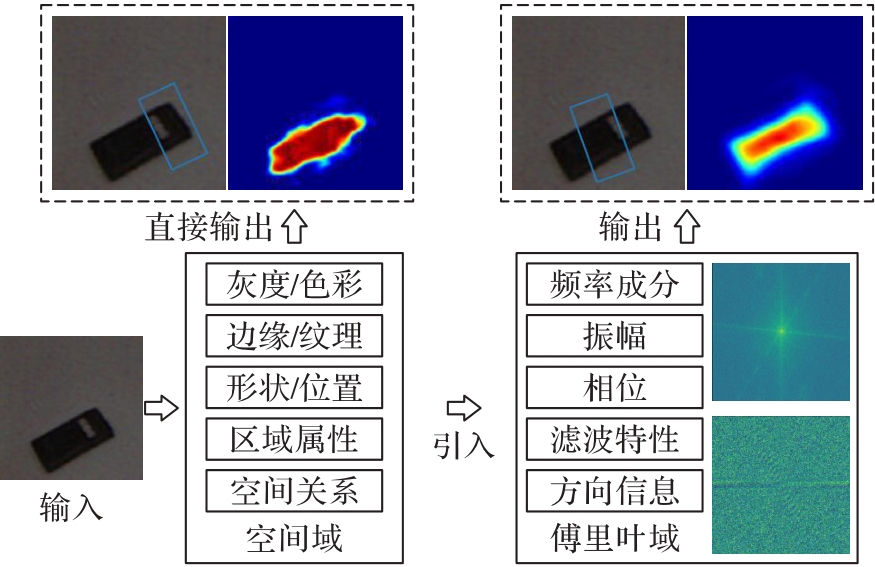
Fig. 1 Comparison of spatial domain based and spatial-Fourier domain based grasp detection methods
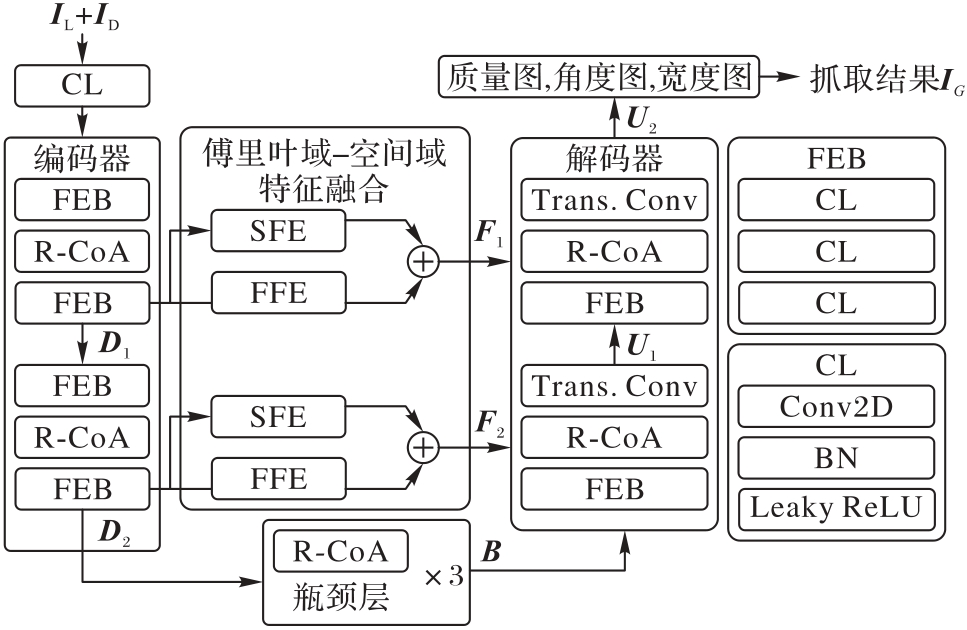
Fig. 2 Overall flow of proposed model
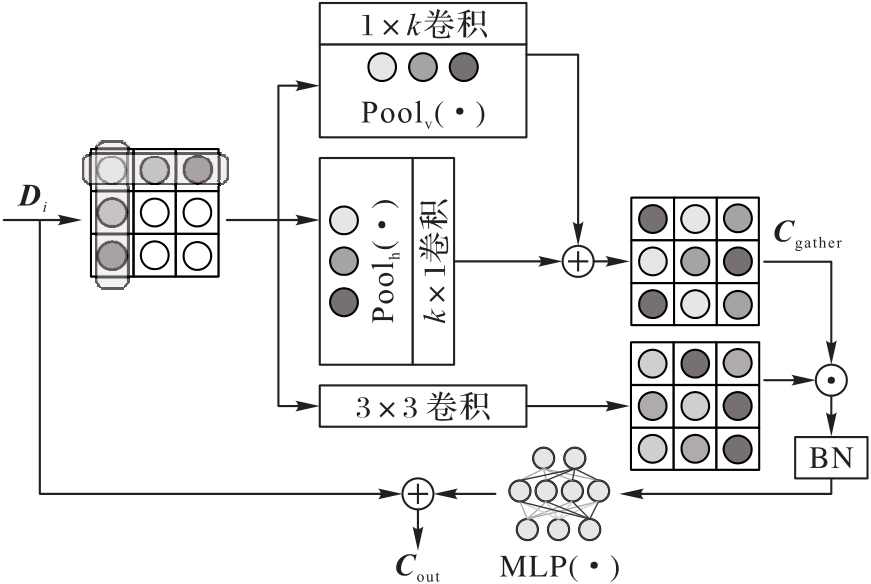
Fig. 3 Structure of FFE block
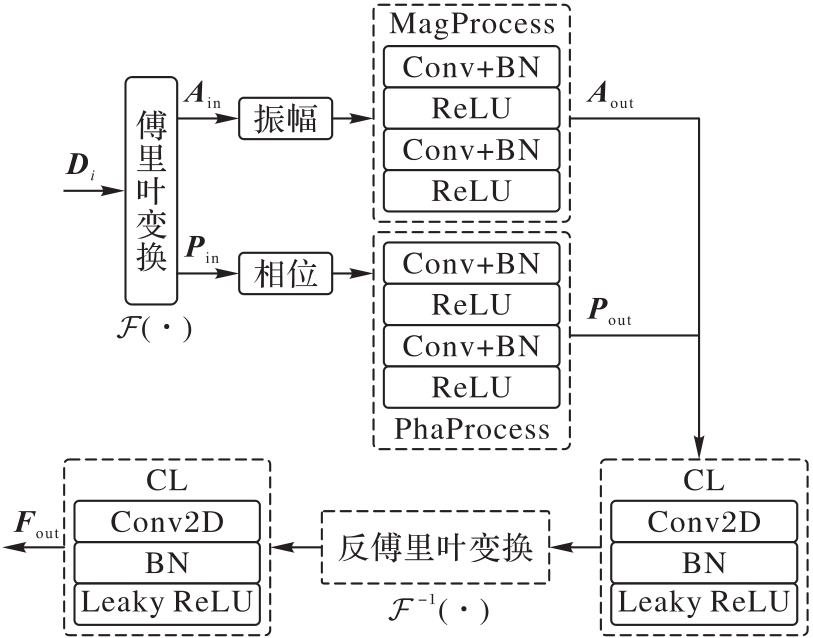
Fig. 4 Structure of FFE module
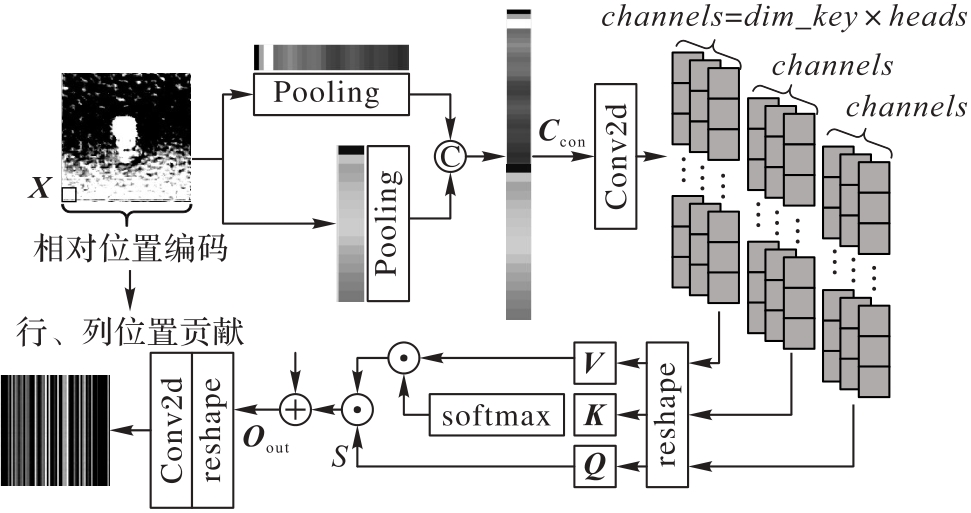
Fig. 5 Structure of R-CoA module
| 高斯噪声 | 椒盐噪声 | 局部方差噪声 | 泊松噪声 | 斑点噪声 | |
|---|---|---|---|---|---|
| 91.77 | 91.35 | 91.55 | 91.19 | 91.88 | |
| 1.5 | 91.01 | 91.02 | 91.09 | 92.01 | 91.72 |
| 2.0 | 90.73 | 91.59 | 91.00 | 91.96 | 91.39 |
Tab. 1 Comparison of grasp detection accuracies on low-light Jacquard dataset with different γ and noise
| 高斯噪声 | 椒盐噪声 | 局部方差噪声 | 泊松噪声 | 斑点噪声 | |
|---|---|---|---|---|---|
| 91.77 | 91.35 | 91.55 | 91.19 | 91.88 | |
| 1.5 | 91.01 | 91.02 | 91.09 | 92.01 | 91.72 |
| 2.0 | 90.73 | 91.59 | 91.00 | 91.96 | 91.39 |
| 方法 | 准确率/% | |
|---|---|---|
| 高斯噪声 | 椒盐噪声 | |
| GG-CNN[ | 84.00 | 88.76 |
| GR-ConvNet[ | 94.38 | 92.13 |
| GR-ConvNetv2[ | 94.38 | 93.25 |
| SE-ResUNet[ | ||
| 本文方法 | 96.62 | 96.62 |
Tab. 2 Grasp detection accuracy comparison of different methods in Gaussian and S&P noise when γ=1.5 (low-light Cornell dataset)
| 方法 | 准确率/% | |
|---|---|---|
| 高斯噪声 | 椒盐噪声 | |
| GG-CNN[ | 84.00 | 88.76 |
| GR-ConvNet[ | 94.38 | 92.13 |
| GR-ConvNetv2[ | 94.38 | 93.25 |
| SE-ResUNet[ | ||
| 本文方法 | 96.62 | 96.62 |
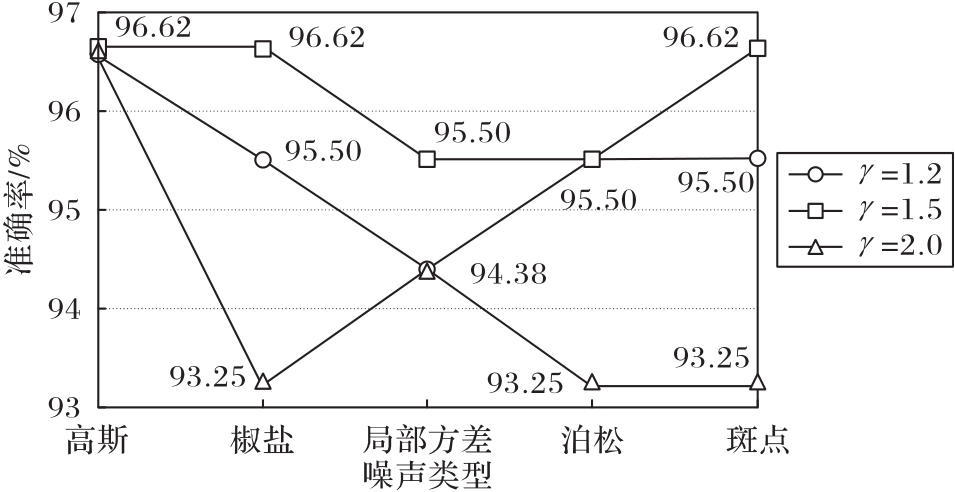
Fig. 6 Accuracy comparison of proposed method at different γ in low-light Cornell dataset
| 方法 | 准确率/% | GFLOPs | Params/106 | Time/ms |
|---|---|---|---|---|
| GR-ConvNet[ | 92.13 | 13.56 | 1.90 | 3.66 |
| GR-ConvNetv2[ | 13.56 | 1.90 | 3.48 | |
| GG-CNN[ | 92.13 | 1.18 | 0.07 | 0.63 |
| TFgrasp[ | 1.50 | 6.80 | 12.17 | |
| SE-ResUNet[ | 24.88 | 3.89 | 4.39 | |
| 本文方法 | 95.50 | 40.74 | 8.42 | 16.41 |
Tab. 3 Performance comparison of different methods on low-light C-Cornell dataset
| 方法 | 准确率/% | GFLOPs | Params/106 | Time/ms |
|---|---|---|---|---|
| GR-ConvNet[ | 92.13 | 13.56 | 1.90 | 3.66 |
| GR-ConvNetv2[ | 13.56 | 1.90 | 3.48 | |
| GG-CNN[ | 92.13 | 1.18 | 0.07 | 0.63 |
| TFgrasp[ | 1.50 | 6.80 | 12.17 | |
| SE-ResUNet[ | 24.88 | 3.89 | 4.39 | |
| 本文方法 | 95.50 | 40.74 | 8.42 | 16.41 |

Fig. 7 Grasp results of different methods on low-light C-Cornell dataset

Fig. 8 Grasp results of proposed method on low-light Cornell and Jacquard datasets with different noise and γ
| 序号 | SFE | FFE | R-CoA | 准确率/% |
|---|---|---|---|---|
| 1 | √ | 93.22 | ||
| 2 | √ | 93.78 | ||
| 3 | √ | 92.65 | ||
| 4 | √ | √ | 93.78 | |
| 5 | √ | √ | 94.35 | |
| 6 | √ | √ | 94.35 | |
| 7 | √ | √ | √ | 95.50 |
Tab. 4 Ablation experimental results on low-light C-Cornell dataset
| 序号 | SFE | FFE | R-CoA | 准确率/% |
|---|---|---|---|---|
| 1 | √ | 93.22 | ||
| 2 | √ | 93.78 | ||
| 3 | √ | 92.65 | ||
| 4 | √ | √ | 93.78 | |
| 5 | √ | √ | 94.35 | |
| 6 | √ | √ | 94.35 | |
| 7 | √ | √ | √ | 95.50 |
| 1 | 韩非,张道辉,赵新刚,等.面向水下抓取作业的复合腔体仿生软体手设计[J].机器人,2023,45(2):207-217. |
| HAN F, ZHANG D H, ZHAO X G, et al. Design of a bionic soft hand with compound cavity for under water grasping[J]. Robot, 2023, 45(2): 207-217. | |
| 2 | CHENG H, MENG M. A grasp posse detection scheme with an end-to-end CNN regression approach[C]// Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics. Piscataway: IEEE, 2018, 544-549. |
| 3 | KUSHWAHA V, SHUKLA P, NANDI G C. Generating quality grasp rectangle using Pix2Pix GAN for intelligent robot grasping[J]. Machine Vision and Applications, 2023, 34(1): No.15. |
| 4 | JIANG Y, GONG X, LIU D, et al. EnlightenGAN: deep light enhancement without paired supervision[J]. IEEE Transactions on Image Processing, 2021, 30: 2340-2349. |
| 5 | GUO C, LI C, GUO J, et al. Zero-reference deep curve estimation for low-light image enhancement[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1780-1789. |
| 6 | NGUYEN C M, CHAN E R, BERGMAN A W, et al. Diffusion in the dark: a diffusion model for low-light text recognition[C]// Proceedings of the 2024 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2024: 4146-4157. |
| 7 | 李淦,牛洺第,陈路,等.融合视觉特征增强机制的机器人弱光环境抓取检测[J].计算机应用,2023,43(8):2564-2571. |
| LI G, NIU M D, CHEN L, et al. Fusion of visual feature enhancement mechanism for robot grasping detection in low light environment[J]. Journal of Computer Applications, 2023, 43(8): 2564-2571. | |
| 8 | NIU M, LU Z, CHEN L, et al. VERGNet: visual enhancement guided robotic grasp detection under low-light condition[J]. IEEE Robotics and Automation Letters, 2023, 8(12): 8541-8548. |
| 9 | ZHANG L, LI M, JIA T, et al. Real-time grasping detection method based on attention residual block and multi-scale receptive field[J]. Journal of Physics: Conference Series, 2022, 2303(1): No.012029. |
| 10 | ZHU J Y, PARK T, ISOLA P, et al. Unpaired image-to-image translation using cycle-consistent adversarial networks[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2223-2232. |
| 11 | KUMRA S, JOSHI S, SAHIN F. Antipodal robotic grasping using generative residual convolutional neural network[C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2020: 9626-9633. |
| 12 | MORRISON D, CORKE P, LEITNER J. Learning robust, real-time, reactive robotic grasping[J]. The International Journal of Robotics Research, 2020, 39(2/3): 183-201. |
| 13 | CHEN L, NIU M, YANG J, et al. Robotic grasp detection using structure prior attention and multiscale features[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(11): 7039-7053. |
| 14 | NIE H, ZHAO Z, CHEN L, et al. Smaller and faster robotic grasp detection model via knowledge distillation and unequal feature encoding[J]. IEEE Robotics and Automation Letters, 2024, 9(8): 7206-7213. |
| 15 | YU S, ZHAI D H, XIA Y, et al. SE-ResUNet: a novel robotic grasp detection method[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 5238-5245. |
| 16 | WANG S, ZHOU Z, KAN Z. When Transformer meets robotic grasping: exploits context for efficient grasp detection[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 8170-8177. |
| 17 | 王雪松,王荣荣,程玉虎.安全强化学习综述[J]. 自动化学报, 2023, 49(9): 1813-1835. |
| WANG X S, WANG R R, CHENG Y H. Safe reinforcement learning: a survey[J]. Acta Automatica Sinica, 2023, 49(9): 1813-1835. | |
| 18 | 李凯文,张涛,王锐,等.基于深度强化学习的组合优化研究进展[J]. 自动化学报, 2021, 47(11): 2521-2537. |
| LI K W, ZHANG T, WANG R, et al. Research reviews of combinatorial optimization methods based on deep reinforcement learning[J]. Acta Automatica Sinica, 2021, 47(11): 2521-2537. | |
| 19 | XIONG P, YIN Y, LIAO J, et al. An adaptive grasping strategy for dexterous hands based on proximity-contact sensing[C]// Proceedings of the 2023 International Conference on Advanced Robotics and Mechatronics. Piscataway: IEEE, 2023, 1181-1186. |
| 20 | MARWAN Q M, LEE C K, SHING C C. Learning pick to place objects using self-supervised learning with minimal training resources[J]. International Journal of Advanced Computer Science and Applications, 2021,12(10), 493-499. |
| 21 | IBRAHIM H, KONG N S P. Brightness preserving dynamic histogram equalization for image contrast enhancement[J]. IEEE Transactions on Consumer Electronics, 2007, 53(4): 1752-1758. |
| 22 | OOI C H, ISA N A M. Adaptive contrast enhancement methods with brightness preserving[J]. IEEE Transactions on Consumer Electronics, 2010, 56(4): 2543-2551. |
| 23 | CHEN Y, WEN C, LIU W, et al. A depth iterative illumination estimation network for low-light image enhancement based on retinex theory[J]. Scientific Reports, 2023, 13(1): No.19709. |
| 24 | ZHANG C, YAN Q, ZHU Y, et al. Attention-based network for low-light image enhancement[C]// Proceedings of the 2020 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2020: 1-6. |
| 25 | FAN J, LI Y, LIANG B, et al. Self-supervised low-light image enhancement based on Retinex model[C]// Proceedings of the 2022 IEEE 10th Joint International Information Technology and Artificial Intelligence Conference. Piscataway: IEEE, 2022: 2138-2141. |
| 26 | WANG Z, LI D, LI G, et al. Multimodal low-light image enhancement with depth information[C]// Proceedings of the 32nd ACM International Conference on Multimedia. New York: ACM, 2024: 4976-4985. |
| 27 | WANG H Y, CHEN L, GUAN Z X. Dual-branch low-light image enhancement via spatial and multi-scale frequency domain fusion[C]// Proceedings of the 2024 IEEE International Conference on Industrial Technology. Piscataway: IEEE, 2024:1-7. |
| 28 | JIANG Y, MOSESON S, SAXENA A. Efficient grasping from RGBD images: learning using a new rectangle representation[C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 3304-3311. |
| 29 | DEPIERRE A, DELLANDRÉA E, CHEN L M. Jacquard:a largescale dataset for robotic grasp detection[C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 3511-3516. |
| [1] | Hui LI, Bingzhi JIA, Chenxi WANG, Ziyu DONG, Jilong LI, Zhaoman ZHONG, Yanyan CHEN. Generative adversarial network underwater image enhancement model based on Swin Transformer [J]. Journal of Computer Applications, 2025, 45(5): 1439-1446. |
| [2] | Man CHEN, Xiaojun YANG, Huimin YANG. Pedestrian trajectory prediction based on graph convolutional network and endpoint induction [J]. Journal of Computer Applications, 2025, 45(5): 1480-1487. |
| [3] | Dan WANG, Wenhao ZHANG, Lijuan PENG. Channel estimation of reconfigurable intelligent surface assisted communication system based on deep learning [J]. Journal of Computer Applications, 2025, 45(5): 1613-1618. |
| [4] | Chun XU, Shuangyan JI, Huan MA, Enwei SUN, Mengmeng WANG, Mingyu SU. Consultation recommendation method based on knowledge graph and dialogue structure [J]. Journal of Computer Applications, 2025, 45(4): 1157-1168. |
| [5] | Liqin WANG, Zhilei GENG, Yingshuang LI, Yongfeng DONG, Meng BIAN. Open-world knowledge reasoning model based on path and enhanced triplet text [J]. Journal of Computer Applications, 2025, 45(4): 1177-1183. |
| [6] | Liwei ZHANG, Quan LIANG, Yutao HU, Qiaole ZHU. Channel shuffle attention mechanism based on group convolution [J]. Journal of Computer Applications, 2025, 45(4): 1069-1076. |
| [7] | Kunyuan JIANG, Xiaoxia LI, Li WANG, Yaodan CAO, Xiaoqiang ZHANG, Nan DING, Yingyue ZHOU. Boundary-cross supervised semantic segmentation network with decoupled residual self-attention [J]. Journal of Computer Applications, 2025, 45(4): 1120-1129. |
| [8] | Shiyue GUO, Jianwu DANG, Yangping WANG, Jiu YONG. 3D hand pose estimation combining attention mechanism and multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(4): 1293-1299. |
| [9] | Jie HU, Qiyang ZHENG, Jun SUN, Yan ZHANG. Multi-label classification model based on multi-label relational graph and local dynamic reconstruction learning [J]. Journal of Computer Applications, 2025, 45(4): 1104-1112. |
| [10] | Huahua WANG, Zijian FAN, Ze LIU. Image adversarial example generation method based on multi-space probability enhancement [J]. Journal of Computer Applications, 2025, 45(3): 883-890. |
| [11] | Haijun GENG, Yun DONG, Zhiguo HU, Haotian CHI, Jing YANG, Xia YIN. Encrypted traffic classification method based on Attention-1DCNN-CE [J]. Journal of Computer Applications, 2025, 45(3): 872-882. |
| [12] | Tianqi ZHANG, Shuang TAN, Xiwen SHEN, Juan TANG. Image watermarking method combining attention mechanism and multi-scale feature [J]. Journal of Computer Applications, 2025, 45(2): 616-623. |
| [13] | Sheng YANG, Yan LI. Contrastive knowledge distillation method for object detection [J]. Journal of Computer Applications, 2025, 45(2): 354-361. |
| [14] | Haiteng MENG, Xiaole ZHAO, Tianrui LI. Lightweight image super-resolution reconstruction based on asymmetric information distillation network [J]. Journal of Computer Applications, 2025, 45(2): 601-609. |
| [15] | Dixin WANG, Jiahao WANG, Min LI, Hao CHEN, Guangyao HU, Yu GONG. Abnormal attack detection for underwater acoustic communication network [J]. Journal of Computer Applications, 2025, 45(2): 526-533. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||