


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (10): 3290-3296.DOI: 10.11772/j.issn.1001-9081.2022091464
Special Issue: 前沿与综合应用
• Frontier and comprehensive applications • Previous Articles Next Articles
Chen LIU1,2, Yang CHEN1,2( ), Hao FU3
), Hao FU3
Received:2022-09-30
Revised:2023-01-13
Accepted:2023-01-15
Online:2023-03-02
Published:2023-10-10
Contact:
Yang CHEN
About author:LIU Chen, born in 1998, M. S. candidate. His research interests include robot navigation and path planning.Supported by:
刘晨1,2, 陈洋1,2(), 符浩3
通讯作者:
陈洋
作者简介:刘晨(1998—),男,湖北洪湖人,硕士研究生,主要研究方向:机器人导航与路径规划基金资助:CLC Number:
Chen LIU, Yang CHEN, Hao FU. UAV path planning for persistent monitoring based on value function iteration[J]. Journal of Computer Applications, 2023, 43(10): 3290-3296.
刘晨, 陈洋, 符浩. 基于值函数迭代的持续监测无人机路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3290-3296.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022091464
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| M | 10.0 | θ | 0.5 |
| α | 0.2 | K | 10.0 |
| γ | 0.3 | σ | 0.1 |
Tab. 1 Simulation parameters
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| M | 10.0 | θ | 0.5 |
| α | 0.2 | K | 10.0 |
| γ | 0.3 | σ | 0.1 |
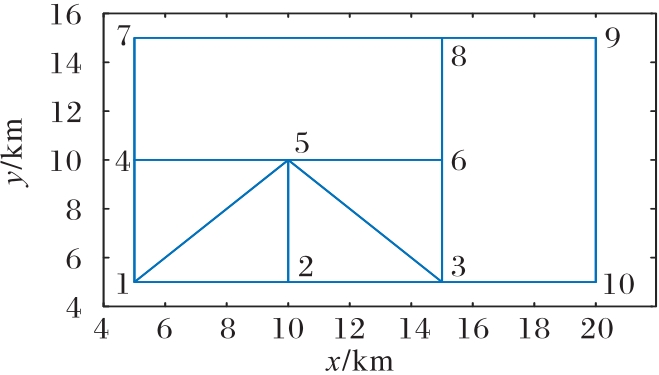
Fig. 1 Road network of persistent monitoring
| 节点 | 坐标 | 最大允许 监测周期/s | 节点 | 坐标 | 最大允许 监测周期/s |
|---|---|---|---|---|---|
| 1 | (5,5) | 25.0 | 6 | (15,10) | 23.0 |
| 2 | (10,5) | 26.0 | 7 | (5,15) | 22.0 |
| 3 | (15,5) | 27.0 | 8 | (15,15) | 29.0 |
| 4 | (5,10) | 28.0 | 9 | (20,15) | 21.0 |
| 5 | (10,10) | 24.0 | 10 | (20,5) | 25.5 |
Tab. 2 Position and maximum allowable monitoring period of each node
| 节点 | 坐标 | 最大允许 监测周期/s | 节点 | 坐标 | 最大允许 监测周期/s |
|---|---|---|---|---|---|
| 1 | (5,5) | 25.0 | 6 | (15,10) | 23.0 |
| 2 | (10,5) | 26.0 | 7 | (5,15) | 22.0 |
| 3 | (15,5) | 27.0 | 8 | (15,15) | 29.0 |
| 4 | (5,10) | 28.0 | 9 | (20,15) | 21.0 |
| 5 | (10,10) | 24.0 | 10 | (20,5) | 25.5 |
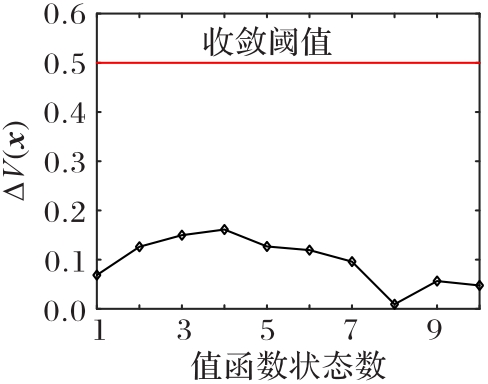
Fig. 2 Convergence threshold
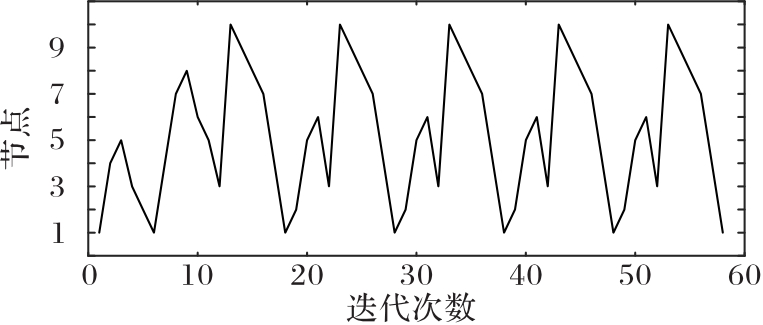
Fig. 3 Persistent monitoring path based on VFI
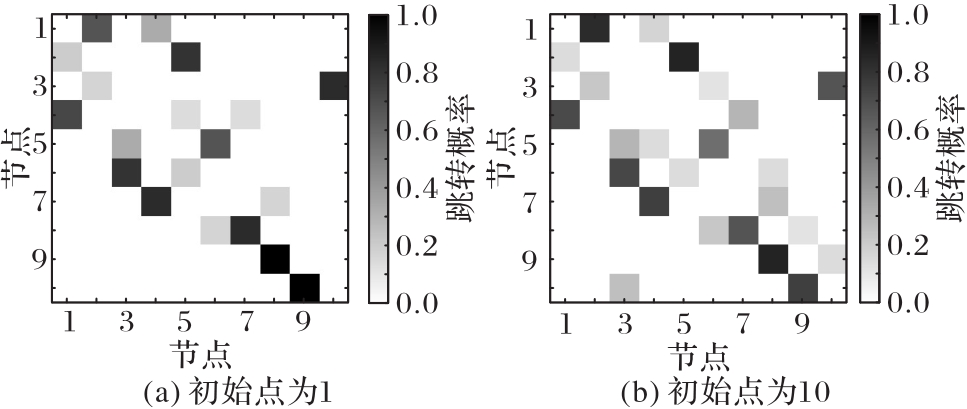
Fig. 4 Grayscale image of stochastic matrix with an initial point of 1 and 10
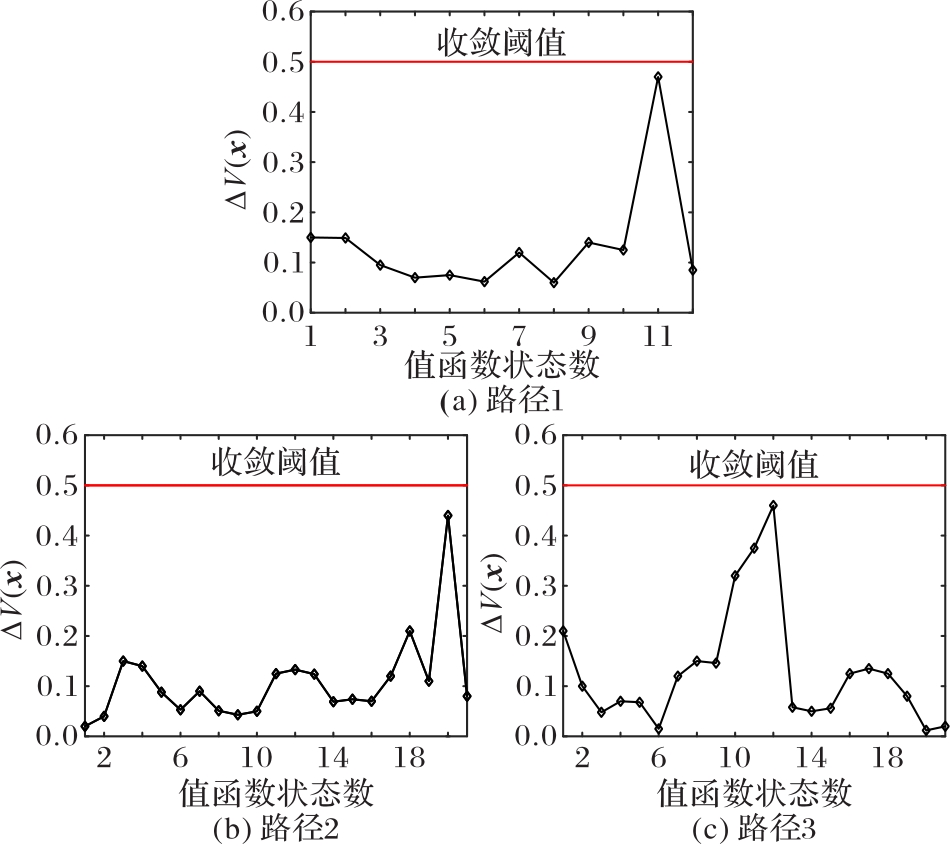
Fig. 5 Convergence curves for three paths
| 路径 | 重复 状态数 | 监测 频率/Hz | 路径 | 重复 状态数 | 监测 频率/Hz |
|---|---|---|---|---|---|
| 原始路径 | 9 | 5.414 2 | 路径2 | 21 | 4.000 0 |
| 路径1 | 12 | 2.000 0 | 路径3 | 21 | 3.414 2 |
Tab. 3 Persistent monitoring path comparison
| 路径 | 重复 状态数 | 监测 频率/Hz | 路径 | 重复 状态数 | 监测 频率/Hz |
|---|---|---|---|---|---|
| 原始路径 | 9 | 5.414 2 | 路径2 | 21 | 4.000 0 |
| 路径1 | 12 | 2.000 0 | 路径3 | 21 | 3.414 2 |
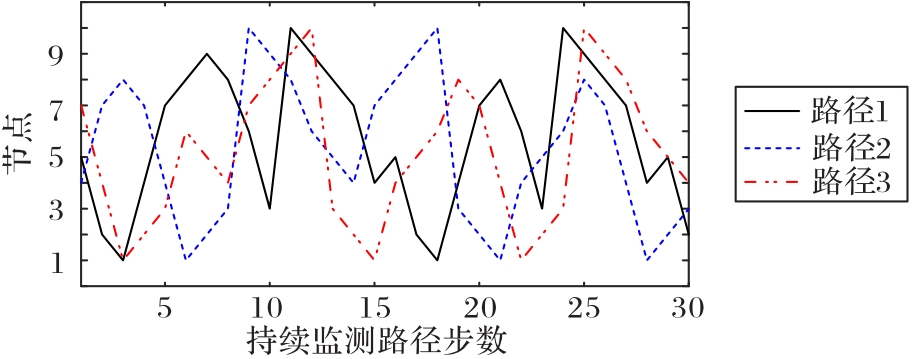
Fig. 6 Three optimized monitoring paths
| 路径 | 信息熵 | 运行时间/s | 路径 | 信息熵 | 运行时间/s |
|---|---|---|---|---|---|
| 原始路径 | 0.483 2 | 0.263 3 | VFI-1 | 0.866 6 | 0.285 5 |
| GA | 0.000 0 | 0.001 5 | VFI-2 | 0.905 0 | 0.363 7 |
| ACO | 0.286 0 | 0.882 9 | VFI-3 | 1.483 1 | 0.401 2 |
| SA | 0.000 0 | 4.124 0 |
Tab. 4 Comparison of path results of different persistent monitoring algorithms
| 路径 | 信息熵 | 运行时间/s | 路径 | 信息熵 | 运行时间/s |
|---|---|---|---|---|---|
| 原始路径 | 0.483 2 | 0.263 3 | VFI-1 | 0.866 6 | 0.285 5 |
| GA | 0.000 0 | 0.001 5 | VFI-2 | 0.905 0 | 0.363 7 |
| ACO | 0.286 0 | 0.882 9 | VFI-3 | 1.483 1 | 0.401 2 |
| SA | 0.000 0 | 4.124 0 |
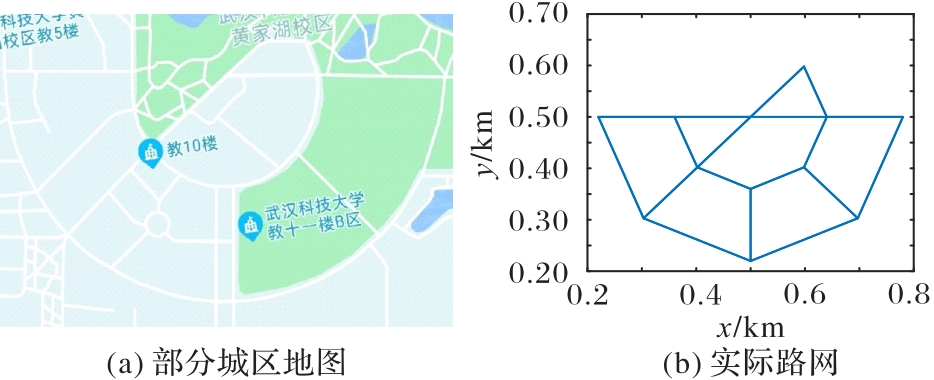
Fig. 7 Map of part urban area and corresponding actual road network
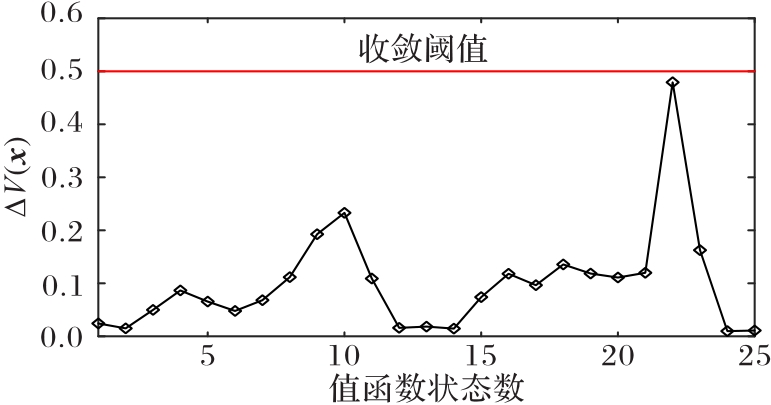
Fig. 8 Convergence curve of monitoring path in actual road network
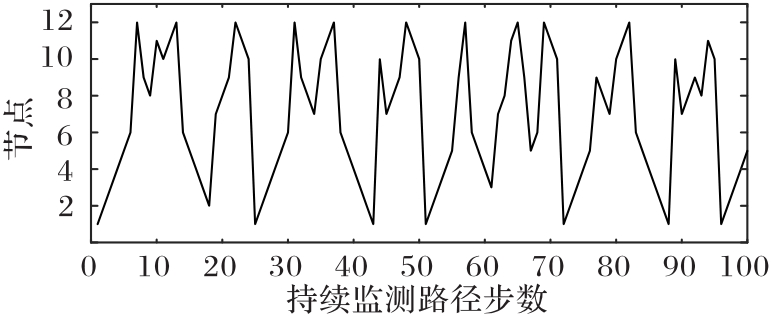
Fig. 9 Optimal persistent monitoring path in actual road network
| 1 | CANNATA G, SGORBISSA A. A minimalist algorithm for multirobot continuous coverage[J]. IEEE Transactions on Robotics, 2011, 27(2): 297-312. 10.1109/tro.2011.2104510 |
| 2 | PORTUGAL D, ROCHA R P. Multi-robot patrolling algorithms: examining performance and scalability[J]. Advanced Robotics, 2013, 27(5): 325-336. 10.1080/01691864.2013.763722 |
| 3 | MACHADO A, RAMALHO G, ZUCKER J D, et al. Multi-agent patrolling: an empirical analysis of alternative architectures[C]// Proceedings of the 2002 International Workshop on Multi-Agent Systems and Agent-Based Simulation, LNCS 2581. Berlin: Springer, 2003: 155-170. |
| 4 | PASQUALETTI F, FRANCHI A, BULLO F. On cooperative patrolling: optimal trajectories, complexity analysis, and approximation algorithms[J]. IEEE Transactions on Robotics, 2012, 28(3): 592-606. 10.1109/tro.2011.2179580 |
| 5 | ELMALIACH Y, AGMON N, KAMINKA G A. Multi-robot area patrol under frequency constraints[J]. Annals of Mathematics and Artificial Intelligence, 2009, 57(3/4): 293-320. 10.1007/s10472-010-9193-y |
| 6 | CHEN Y, SHU Y, HU M, et al. Multi-UAV cooperative path planning with monitoring privacy preservation[J]. Applied Sciences, 2022, 12(23): No.12111. 10.3390/app122312111 |
| 7 | ZHANG H, ZHAO J, WANG R, et al. Multi-objective reinforcement learning algorithm and its application in drive system[C]// Proceedings of the 34th Annual Conference of IEEE Industrial Electronics. Piscataway: IEEE, 2008: 274-279. 10.1109/iecon.2008.4757965 |
| 8 | OH J, GUO X, LEE H, et al. Action-conditional video prediction using deep networks in Atari games[C]// Proceedings of the 28th International Conference on Neural Information Processing Systems — Volume 2. Cambridge: MIT Press, 2015: 2863-2871. |
| 9 | CAICEDO J C, LAZEBNIK S. Active object localization with deep reinforcement learning[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 2488-2496. 10.1109/iccv.2015.286 |
| 10 | LEWIS M, YARATS D, DAUPHIN Y, et al. Deal or no deal? end-to-end learning of negotiation dialogues[C]// Proceedings of the 2017 Conference on Empirical Methods in Natural Language Processing. Stroudsburg, PA: ACL, 2017: 2443-2453. 10.18653/v1/d17-1259 |
| 11 | WEISZ G, BUDZIANOWSKI P, SU P H, et al. Sample efficient deep reinforcement learning for dialogue systems with large action spaces[J]. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2018, 26(11): 2083-2097. 10.1109/taslp.2018.2851664 |
| 12 | DERHAMI V, PAKSIMA J, KHAJAH H. Web pages ranking algorithm based on reinforcement learning and user feedback[J]. Journal of AI and Data Mining, 2015, 3(2): 157-168. 10.5829/idosi.jaidm.2015.03.02.05 |
| 13 | BELLMAN R. On the theory of dynamic programming[J]. Proceedings of the National Academy of Sciences of the United States of America, 1952, 38(8): 716-719. 10.1073/pnas.38.8.716 |
| 14 | BRAVO R Z B, LEIRAS A, CYRINO OLIVEIRA F L. The use of UAV s in humanitarian relief: an application of POMDP-based methodology for finding victims[J]. Production and Operations Management, 2019, 28(2): 421-440. 10.1111/poms.12930 |
| 15 | BURKS L, AHMED N, LOEFGREN I, et al. Collaborative human-autonomy semantic sensing through structured POMDP planning[J]. Robotics and Autonomous Systems, 2021, 140: No.103753. 10.1016/j.robot.2021.103753 |
| 16 | AKBARINASAJI S, KAVAKLIOGLU C, BAŞAR A, et al. Partially observable Markov decision process to generate policies in software defect management[J]. Journal of Systems and Software, 2020, 163: No.110518. 10.1016/j.jss.2020.110518 |
| 17 | HORÁK K, BOŠANSKÝ B, PÉCHOUČEK M. Heuristic search value iteration for one-sided partially observable stochastic games[C]// Proceedings of the 31st AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2017:558-564. 10.1609/aaai.v31i1.10597 |
| 18 | LIU F, HUA X, JIN X. A hybrid heuristic value iteration algorithm for POMDP[C]// Proceedings of the IEEE 28th International Conference on Tools with Artificial Intelligence. Piscataway: IEEE, 2016: 304-310. 10.1109/ictai.2016.0054 |
| 19 | 房俊恒. 基于点的值迭代算法在POMDP问题中的研究[D]. 苏州:苏州大学, 2015: 25-35. |
| FANG J H. Research on point-based value iteration algorithms in POMDP domains[D]. Suzhou: Soochow University, 2015: 25-35. | |
| 20 | WASHINGTON P H, SCHWAGER M. Reduced state value iteration for multi-drone persistent surveillance with charging constraints[C]// Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2021: 6390-6397. 10.1109/iros51168.2021.9636160 |
| 21 | BETHKE B, BERTUCCELLI L, HOW J P. Experimental demonstration of adaptive MDP-based planning with model uncertainty[C]// Proceedings of the 2008 AIAA Guidance, Navigation and Control Conference and Exhibit. Reston, VA: AIAA, 2008: No.6322. 10.2514/6.2008-6322 |
| 22 | JEONG B M, HA J S, CHOI H L. MDP-based mission planning for multi-UAV persistent surveillance[C]// Proceedings of the 14th International Conference on Control, Automation and Systems. Piscataway: IEEE, 2014: 831-834. 10.1109/iccas.2014.6987894 |
| 23 | 陈佳,游晓明,刘升,等. 结合信息熵的多种群博弈蚁群算法[J]. 计算机工程与应用, 2019, 55(16):170-178. |
| CHEN J, YOU X M, LIU S, et al. Entropy-game based multi-population ant colony optimization[J]. Computer Engineering and Applications, 2019, 55(16):170-178. | |
| 24 | HA M, WANG D, LIU D. Generalized value iteration for discounted optimal control with stability analysis[J]. Systems and Control Letters, 2021, 147: No.104847. 10.1016/j.sysconle.2020.104847 |
| [1] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [2] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [3] | Jianqiang LI, Zhou HE. Hybrid NSGA-Ⅱ for vehicle routing problem with multi-trip pickup and delivery [J]. Journal of Computer Applications, 2024, 44(4): 1187-1194. |
| [4] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [5] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [6] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [7] | Yongdi LI, Caihong LI, Yaoyu ZHANG, Guosheng ZHANG. Mobile robot path planning based on improved SAC algorithm [J]. Journal of Computer Applications, 2023, 43(2): 654-660. |
| [8] | Lin HUANG, Qiang FU, Nan TONG. Solving robot path planning problem by adaptively adjusted Harris hawk optimization algorithm [J]. Journal of Computer Applications, 2023, 43(12): 3840-3847. |
| [9] | Houming FAN, Shuang MU, Lijun YUE. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion [J]. Journal of Computer Applications, 2022, 42(7): 2281-2291. |
| [10] | Sheng CHEN, Jun ZHOU, Xiaobing HU, Ji MA. Optimization of airport arrival procedures based on hybrid simulated annealing algorithm [J]. Journal of Computer Applications, 2022, 42(2): 606-615. |
| [11] | LI Kairong, LIU Shuang, HU Qianqian, TANG Yiyuan. Improved ant colony optimization algorithm for path planning based on turning angle constraint [J]. Journal of Computer Applications, 2021, 41(9): 2560-2568. |
| [12] | TANG Andi, HAN Tong, XU Dengwu, XIE Lei. Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm [J]. Journal of Computer Applications, 2021, 41(7): 2128-2136. |
| [13] | ZHANG Kang, CHEN Jianping. Path planning algorithm in complex environment using self-adjusting sampling space [J]. Journal of Computer Applications, 2021, 41(4): 1207-1213. |
| [14] | WEI Bo, YANG Rong, SHU Sihao, WAN Yong, MIAO Jianguo. Path planning of mobile robots based on ion motion-artificial bee colony algorithm [J]. Journal of Computer Applications, 2021, 41(2): 379-383. |
| [15] | HUANG Shuzhao, TIAN Junwei, QIAO Lu, WANG Qin, SU Yu. Unmanned aerial vehicle path planning based on improved genetic algorithm [J]. Journal of Computer Applications, 2021, 41(2): 390-397. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||