


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (4): 1071-1078.DOI: 10.11772/j.issn.1001-9081.2022020287
所属专题: 人工智能
王昱( ), 范子琳, 任田君, 姬晓飞
), 范子琳, 任田君, 姬晓飞
收稿日期:2022-03-11
修回日期:2022-05-26
接受日期:2022-05-30
发布日期:2022-08-16
出版日期:2023-04-10
通讯作者:
王昱
作者简介:范子琳(1998—),女,辽宁锦州人,硕士研究生,主要研究方向:机器推理、信息融合;基金资助:
Yu WANG(), Zilin FAN, Tianjun REN, Xiaofei JI
Received:2022-03-11
Revised:2022-05-26
Accepted:2022-05-30
Online:2022-08-16
Published:2023-04-10
Contact:
Yu WANG
About author:FAN Zilin, born in 1998, M. S. candidate. Her research interests include machine reasoning, information fusion.Supported by:摘要:
现有证据推理方法模型结构固定、信息处理方式和推理机制单一,难以适用于集结了不确定、错误甚至缺失等多种不完备信息环境下的目标识别。针对该问题,提出了一种切换推理证据网络(SR-EN)方法。首先,考虑证据节点删除等情况构建多模板网络模型;然后,分析各证据变量与目标类型的条件关联性以建立针对不完备信息的推理规则库;最后,提出基于三种证据输入及修正方式的智能化时空融合推理方法。与传统的证据网络(EN)以及EN与优劣解距离法(TOPSIS)等两种信息修正方法的结合方法相比,SR-EN能够在确保推理时效性的同时实现在多类随机性不完备信息下对空中目标的连续准确识别。实验结果表明,通过对各类不完备信息的有效识别,SR-EN能够实现连续推理过程中证据处理方式、网络结构和节点间融合规则的自适应切换。
中图分类号:
王昱, 范子琳, 任田君, 姬晓飞. 不完备信息下基于切换推理证据网络的空中目标识别方法[J]. 计算机应用, 2023, 43(4): 1071-1078.
Yu WANG, Zilin FAN, Tianjun REN, Xiaofei JI. Aerial target identification method based on switching reasoning evidential network under incomplete information[J]. Journal of Computer Applications, 2023, 43(4): 1071-1078.
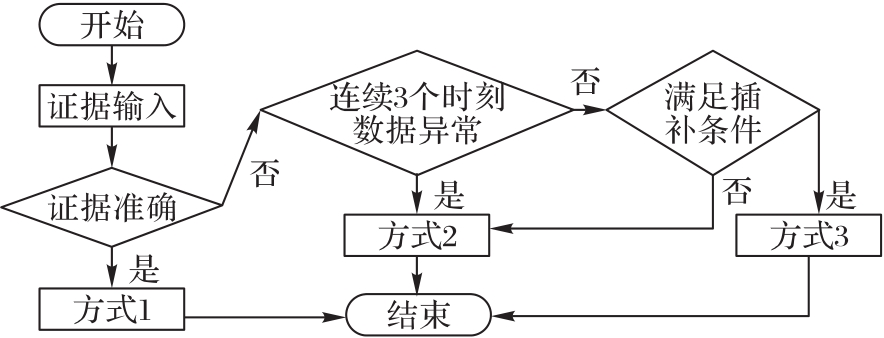
图1 证据输入方式切换流程
Fig. 1 Evidence input mode switching process
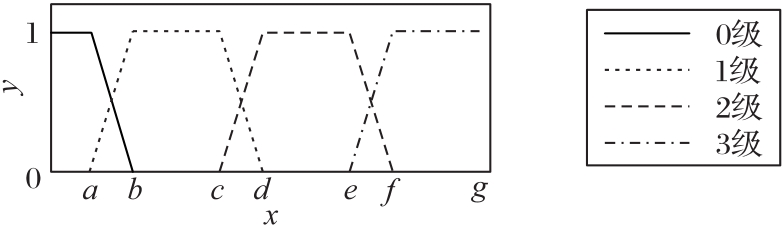
图2 四级隶属度曲线
Fig. 2 Four-level affinity curve
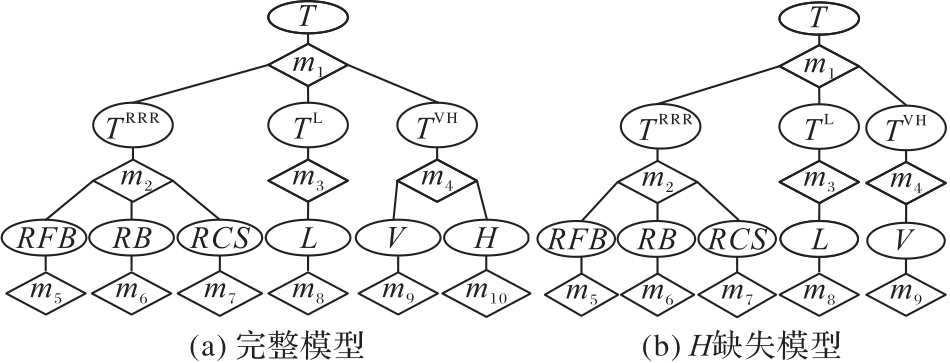
图3 目标识别证据网络模型
Fig. 3 Target identification evidential network model
| 节点 | 含义 | 识别框架 | 说明 |
|---|---|---|---|
| T | 目标机型 | {SF,F,SB, B,A,HE, US} | {隐身战斗机,普通战斗机,隐身轰炸机,普通轰炸机,预警机,直升机,无人侦察机} |
RCS、RFB、RB 规则融合T | ― | ― | |
| L规则融合T | ― | ― | |
| VH规则融合T | ― | ― | |
| V | 速度 | {0,1,2,3} | {极小,小,高,极高} |
| H | 飞行高度 | {0,1,2,3} | {极低,低,高,极高} |
| L | 机身长度 | {0,1,2,3} | {极短,短,长,极长} |
| RCS | 雷达反射面积 | {0,1,2,3} | {极小,小,大,极大} |
| RFB | 雷达频率段 | {0,1} | {敏捷,固定} |
| RB | 雷达波束方向 | {0,1} | {空对空,空对地} |
表1 网络模型变量说明
Tab. 1 Description of network model variables
| 节点 | 含义 | 识别框架 | 说明 |
|---|---|---|---|
| T | 目标机型 | {SF,F,SB, B,A,HE, US} | {隐身战斗机,普通战斗机,隐身轰炸机,普通轰炸机,预警机,直升机,无人侦察机} |
RCS、RFB、RB 规则融合T | ― | ― | |
| L规则融合T | ― | ― | |
| VH规则融合T | ― | ― | |
| V | 速度 | {0,1,2,3} | {极小,小,高,极高} |
| H | 飞行高度 | {0,1,2,3} | {极低,低,高,极高} |
| L | 机身长度 | {0,1,2,3} | {极短,短,长,极长} |
| RCS | 雷达反射面积 | {0,1,2,3} | {极小,小,大,极大} |
| RFB | 雷达频率段 | {0,1} | {敏捷,固定} |
| RB | 雷达波束方向 | {0,1} | {空对空,空对地} |
| 证据 | 各焦元变量作用区间 | |||
|---|---|---|---|---|
| {0} | {1} | {2} | {3} | |
| V/(km·h-1) | 0~350 | 280~1 000 | 650~2 400 | 1 300~3 600 |
| H/m | 0~200 | 100~6 000 | 3 000~20 000 | 10 000~36 000 |
| L/m | 0~10 | 5~30 | 15~65 | 45~90 |
| RCS/m2 | 0~1 | 0.5~6 | 2~20 | 10~90 |
表2 定量证据的等级区间
Tab. 2 Quantitative evidence grade intervals
| 证据 | 各焦元变量作用区间 | |||
|---|---|---|---|---|
| {0} | {1} | {2} | {3} | |
| V/(km·h-1) | 0~350 | 280~1 000 | 650~2 400 | 1 300~3 600 |
| H/m | 0~200 | 100~6 000 | 3 000~20 000 | 10 000~36 000 |
| L/m | 0~10 | 5~30 | 15~65 | 45~90 |
| RCS/m2 | 0~1 | 0.5~6 | 2~20 | 10~90 |
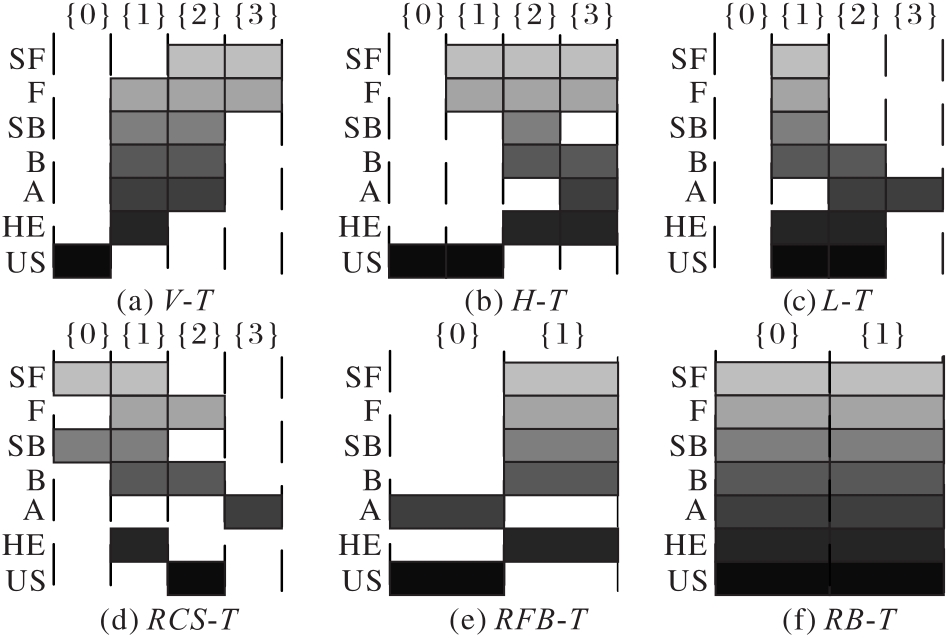
图4 目标机型与证据变量之间的映射关系
Fig. 4 Mapping relationship between target types and evidence variables
| 规则库 | 序号 | 条件 | [机型T,信度β] | [θ1,θ2] |
|---|---|---|---|---|
| Ⅰ | 1 | V=0,H=0 | [US,1] | [0.6,0.8] |
| 2 | V=0,H=1 | [US,1] | [0.6,0.8] | |
| 3 | V=1,H=1 | [F,1] | [0.6,0.8] | |
| 4 | V=1,H=2 | [F,0.2][SB,0.4][A,0.1][HE,0.1][{F,SB,A,HE},0.2] | [0.9,1] | |
| 5 | V=1,H=3 | [F,0.2][B,0.2][A,0.2][HE,0.2][{F,B,A,HE},0.2] | [0.9,1] | |
| 6 | V=2,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 7 | V=2,H=2 | [SF,0.1][F,0.4][SB,0.2][B,0.1][{SF,F,SB,B},0.2] | [0.9,1] | |
| 8 | V=2,H=3 | [SF,0.2][F,0.2][B,0.2][A,0.2][{SF,F,B,A},0.2] | [0.9,1] | |
| 9 | V=3,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 10 | V=3,H=2 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 11 | V=3,H=3 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 12 | V=0,H缺失 | [US,1] | [0.6,0.8] | |
| 13 | V=1,H缺失 | [F,0.15][SB,0.15][B,0.15][A,0.15][HE,0.15][{F,SB,B,A,HE},0.25] | [0.9,1] | |
| 14 | V=2,H缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][A,0.15][{SF,F,SB,B,A},0.25] | [0.9,1] | |
| 15 | V=3,H缺失 | [SF.0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 16 | V缺失,H=0 | [US,1] | [0.6,0.8] | |
| 17 | V缺失,H=1 | [SF,0.3][F,0.3][US,0.3][{SF,F,US},0.1] | [0.9,1] | |
| 18 | V缺失,H=2 | [SF,0.15][F,0.15][SB,0.3][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 19 | V缺失,H=3 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| Ⅱ | 1 | L=1 | [SF,0.1][F,0.3][SB,0.1][B,0.1][HE,0.15][US,0.15][{SF,F,SB,HE,US},0.1] | [0.9,1] |
| 2 | L=2 | [B,0.2][A,0.2][HE,0.2][US,0.2][{B,A,HE,US},0.2] | [0.9,1] | |
| 3 | L=3 | [A,1] | [0.6,0.8] | |
| Ⅲ | 1 | RCS=0,RFB=1,RB=1 | [SF,0.85][SB,0.1][{SF,SB},0.05] | [0.9,1] |
| 2 | RCS=0,RFB=1,RB=1 | [SF,0.1][SB,0.85][{SF,SB},0.05] | [0.9,1] | |
| 3 | RCS=1,RFB=1,RB=0 | [SF,0.1][F,0.4][SB,0.05][B,0.05][HE,0.3][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 4 | RCS=1,RFB=1,RB=1 | [SF,0.05][F,0.1][SB,0.1][B,0.3][HE,0.3[{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 5 | RCS=2,RFB=1,RB=0 | [F,0.8][B,0.1][{F,B},0.1] | [0.9,1] | |
| 6 | RCS=2,RFB=1,RB=1 | [F,0.1][B,0.8][{F,B},0.1] | [0.9,1] | |
| 7 | RCS=2,RFB=0,RB=0 | [US,1] | [0.6,0.8] | |
| 8 | RCS=2,RFB=0,RB=1 | [US,1] | [0.6,0.8] | |
| 9 | RCS=3,RFB=0,RB=0 | [A,1] | [0.6,0.8] | |
| 10 | RCS=3,RFB=0,RB=1 | [A,1] | [0.6,0.8] | |
| 11 | RCS=0,RFB,RB缺失 | [SF,0.4][SB,0.4][{SF,SB},0.2] | [0.9,1] | |
| 12 | RCS=1,RFB,RB缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| 13 | RCS=2,RFB,RB缺失 | [F,0.3][B,0.3][US,0.3][{F,B,US},0.1] | [0.9,1] | |
| 14 | RCS=3,RFB,RB缺失 | [A,1] | [0.6,0.8] | |
| 15 | RCS缺失,RFB=0,RB=0 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 16 | RCS缺失,RFB=0,RB=1 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 17 | RCS缺失,RFB=1,RB=0 | [SF,0.25][F,0.25][SB,0.05][B,0.05][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 18 | RCS缺失,RFB=1,RB=1 | [SF,0.05][F,0.05][SB,0.25][B,0.25][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] |
表3 规则库
Tab. 3 Rule bases
| 规则库 | 序号 | 条件 | [机型T,信度β] | [θ1,θ2] |
|---|---|---|---|---|
| Ⅰ | 1 | V=0,H=0 | [US,1] | [0.6,0.8] |
| 2 | V=0,H=1 | [US,1] | [0.6,0.8] | |
| 3 | V=1,H=1 | [F,1] | [0.6,0.8] | |
| 4 | V=1,H=2 | [F,0.2][SB,0.4][A,0.1][HE,0.1][{F,SB,A,HE},0.2] | [0.9,1] | |
| 5 | V=1,H=3 | [F,0.2][B,0.2][A,0.2][HE,0.2][{F,B,A,HE},0.2] | [0.9,1] | |
| 6 | V=2,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 7 | V=2,H=2 | [SF,0.1][F,0.4][SB,0.2][B,0.1][{SF,F,SB,B},0.2] | [0.9,1] | |
| 8 | V=2,H=3 | [SF,0.2][F,0.2][B,0.2][A,0.2][{SF,F,B,A},0.2] | [0.9,1] | |
| 9 | V=3,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 10 | V=3,H=2 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 11 | V=3,H=3 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 12 | V=0,H缺失 | [US,1] | [0.6,0.8] | |
| 13 | V=1,H缺失 | [F,0.15][SB,0.15][B,0.15][A,0.15][HE,0.15][{F,SB,B,A,HE},0.25] | [0.9,1] | |
| 14 | V=2,H缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][A,0.15][{SF,F,SB,B,A},0.25] | [0.9,1] | |
| 15 | V=3,H缺失 | [SF.0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 16 | V缺失,H=0 | [US,1] | [0.6,0.8] | |
| 17 | V缺失,H=1 | [SF,0.3][F,0.3][US,0.3][{SF,F,US},0.1] | [0.9,1] | |
| 18 | V缺失,H=2 | [SF,0.15][F,0.15][SB,0.3][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 19 | V缺失,H=3 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| Ⅱ | 1 | L=1 | [SF,0.1][F,0.3][SB,0.1][B,0.1][HE,0.15][US,0.15][{SF,F,SB,HE,US},0.1] | [0.9,1] |
| 2 | L=2 | [B,0.2][A,0.2][HE,0.2][US,0.2][{B,A,HE,US},0.2] | [0.9,1] | |
| 3 | L=3 | [A,1] | [0.6,0.8] | |
| Ⅲ | 1 | RCS=0,RFB=1,RB=1 | [SF,0.85][SB,0.1][{SF,SB},0.05] | [0.9,1] |
| 2 | RCS=0,RFB=1,RB=1 | [SF,0.1][SB,0.85][{SF,SB},0.05] | [0.9,1] | |
| 3 | RCS=1,RFB=1,RB=0 | [SF,0.1][F,0.4][SB,0.05][B,0.05][HE,0.3][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 4 | RCS=1,RFB=1,RB=1 | [SF,0.05][F,0.1][SB,0.1][B,0.3][HE,0.3[{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 5 | RCS=2,RFB=1,RB=0 | [F,0.8][B,0.1][{F,B},0.1] | [0.9,1] | |
| 6 | RCS=2,RFB=1,RB=1 | [F,0.1][B,0.8][{F,B},0.1] | [0.9,1] | |
| 7 | RCS=2,RFB=0,RB=0 | [US,1] | [0.6,0.8] | |
| 8 | RCS=2,RFB=0,RB=1 | [US,1] | [0.6,0.8] | |
| 9 | RCS=3,RFB=0,RB=0 | [A,1] | [0.6,0.8] | |
| 10 | RCS=3,RFB=0,RB=1 | [A,1] | [0.6,0.8] | |
| 11 | RCS=0,RFB,RB缺失 | [SF,0.4][SB,0.4][{SF,SB},0.2] | [0.9,1] | |
| 12 | RCS=1,RFB,RB缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| 13 | RCS=2,RFB,RB缺失 | [F,0.3][B,0.3][US,0.3][{F,B,US},0.1] | [0.9,1] | |
| 14 | RCS=3,RFB,RB缺失 | [A,1] | [0.6,0.8] | |
| 15 | RCS缺失,RFB=0,RB=0 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 16 | RCS缺失,RFB=0,RB=1 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 17 | RCS缺失,RFB=1,RB=0 | [SF,0.25][F,0.25][SB,0.05][B,0.05][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 18 | RCS缺失,RFB=1,RB=1 | [SF,0.05][F,0.05][SB,0.25][B,0.25][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] |
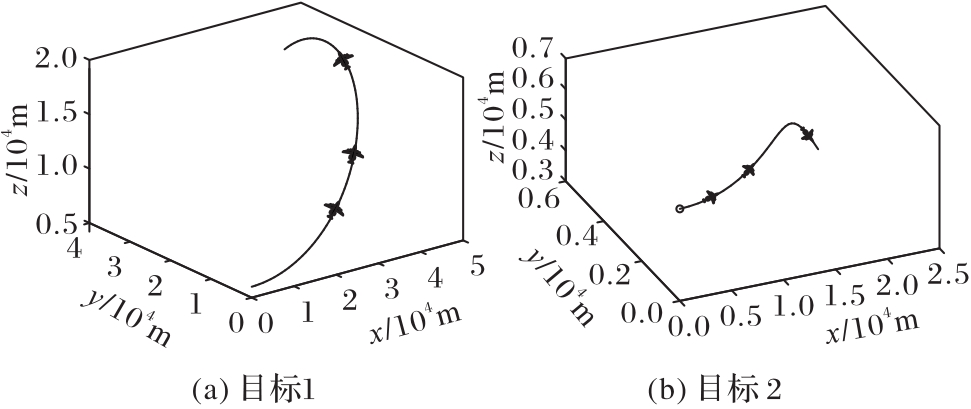
图5 检测目标飞行轨迹
Fig. 5 Detection of target flight trajectory
| 目标 | 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|---|
| 1 | t1 | 900.05 | 6 000.0 | 17.32 | 0.90 | 1 | 0 |
| t2 | 892.53 | 7 280.4 | 14.38 | 2.00 | 1 | 0 | |
| t3 | 866.29 | 10 773.0 | 16.54 | 1.50 | 1 | 0 | |
| t4 | 841.25 | 15 102.0 | 17.32 | 1.30 | 1 | 0 | |
| t5 | 815.98 | 18 155.0 | 16.39 | 0.75 | 1 | 0 | |
| t6 | 854.47 | 18 200.0 | 16.00 | 1.51 | 1 | 0 | |
| t7 | 902.89 | 13 900.0 | 17.34 | 2.00 | 1 | 0 | |
| t8 | 966.31 | 3 237.8 | 16.97 | 2.40 | 1 | 0 | |
| 2 | t1 | ф | 6 050.0 | 21.00 | ф | 1 | 1 |
| t2 | 398.70 | 6 127.1 | 19.00 | 0.79 | 1 | 1 | |
| t3 | 6 277.9 | 19.54 | ф | 1 | 1 | ||
| t4 | ф | 6 414.5 | 18.00 | ф | 1 | ||
| t5 | ф | 6 406.9 | ф | ф | 1 | ||
| t6 | 406.20 | 5 988.2 | 20.90 | 0.90 | 1 | 1 | |
| t7 | 416.20 | 5 590.9 | 17.34 | 0.84 | 1 | 1 | |
| t8 | 4 771.4 | 19.97 | ф | 1 | 1 |
表4 目标1、2的属性数据
Tab. 4 Attribute data of target 1 and 2
| 目标 | 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|---|
| 1 | t1 | 900.05 | 6 000.0 | 17.32 | 0.90 | 1 | 0 |
| t2 | 892.53 | 7 280.4 | 14.38 | 2.00 | 1 | 0 | |
| t3 | 866.29 | 10 773.0 | 16.54 | 1.50 | 1 | 0 | |
| t4 | 841.25 | 15 102.0 | 17.32 | 1.30 | 1 | 0 | |
| t5 | 815.98 | 18 155.0 | 16.39 | 0.75 | 1 | 0 | |
| t6 | 854.47 | 18 200.0 | 16.00 | 1.51 | 1 | 0 | |
| t7 | 902.89 | 13 900.0 | 17.34 | 2.00 | 1 | 0 | |
| t8 | 966.31 | 3 237.8 | 16.97 | 2.40 | 1 | 0 | |
| 2 | t1 | ф | 6 050.0 | 21.00 | ф | 1 | 1 |
| t2 | 398.70 | 6 127.1 | 19.00 | 0.79 | 1 | 1 | |
| t3 | 6 277.9 | 19.54 | ф | 1 | 1 | ||
| t4 | ф | 6 414.5 | 18.00 | ф | 1 | ||
| t5 | ф | 6 406.9 | ф | ф | 1 | ||
| t6 | 406.20 | 5 988.2 | 20.90 | 0.90 | 1 | 1 | |
| t7 | 416.20 | 5 590.9 | 17.34 | 0.84 | 1 | 1 | |
| t8 | 4 771.4 | 19.97 | ф | 1 | 1 |
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.208 5 | 0.364 1 | 0.218 9 | 0.208 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t2 | 0.147 3 | 0.546 7 | 0.158 7 | 0.147 3 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.102 0 | 0.684 1 | 0.111 9 | 0.102 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t4 | 0.075 8 | 0.848 2 | 0.000 0 | 0.075 8 | 0.000 0 | 0.000 0 | 0.000 0 |
| t5 | 0.000 0 | 0.924 4 | 0.000 0 | 0.075 3 | 0.000 0 | 0.000 3 | 0.000 0 |
| t6 | 0.024 2 | 0.938 8 | 0.000 0 | 0.037 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.022 6 | 0.929 0 | 0.019 8 | 0.029 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.030 1 | 0.969 9 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 |
表5 SR-EN方法对目标1的识别结果
Tab. 5 Identification results of SR-EN method for target 1
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.208 5 | 0.364 1 | 0.218 9 | 0.208 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t2 | 0.147 3 | 0.546 7 | 0.158 7 | 0.147 3 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.102 0 | 0.684 1 | 0.111 9 | 0.102 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t4 | 0.075 8 | 0.848 2 | 0.000 0 | 0.075 8 | 0.000 0 | 0.000 0 | 0.000 0 |
| t5 | 0.000 0 | 0.924 4 | 0.000 0 | 0.075 3 | 0.000 0 | 0.000 3 | 0.000 0 |
| t6 | 0.024 2 | 0.938 8 | 0.000 0 | 0.037 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.022 6 | 0.929 0 | 0.019 8 | 0.029 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.030 1 | 0.969 9 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | 2 | 1 | 1 | 2 | 1 | 1 |
| t2 | 1 | 1 | 1 | 1 | 1 | 1 |
| t3 | 2 | 1 | 1 | 2 | 1 | 1 |
| t4 | 2 | 1 | 1 | 2 | 1 | 3 |
| t5 | 2 | 1 | 3 | 2 | 3 | 1 |
| t6 | 1 | 1 | 1 | 1 | 1 | 1 |
| t7 | 1 | 1 | 1 | 1 | 1 | 1 |
| t8 | 2 | 1 | 1 | 2 | 1 | 1 |
表6 目标2识别中证据输入方式的选择及切换
Tab. 6 Selection and switching for evidence input modes in target 2 identification
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | 2 | 1 | 1 | 2 | 1 | 1 |
| t2 | 1 | 1 | 1 | 1 | 1 | 1 |
| t3 | 2 | 1 | 1 | 2 | 1 | 1 |
| t4 | 2 | 1 | 1 | 2 | 1 | 3 |
| t5 | 2 | 1 | 3 | 2 | 3 | 1 |
| t6 | 1 | 1 | 1 | 1 | 1 | 1 |
| t7 | 1 | 1 | 1 | 1 | 1 | 1 |
| t8 | 2 | 1 | 1 | 2 | 1 | 1 |
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | / | 0,0,0.8, 0,0.2 | 0,0.48, 0.32,0,0.2 | / | 1 | 1 |
| t2 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.59, 0.21,0,0.2 | 0.33,0.46, 0,0,0.2 | 1 | 1 |
| t3 | / | 0,0,0.8, 0,0.2 | 0,0.55, 0.24,0,0.2 | / | 1 | 1 |
| t4 | / | 0,0,0.8, 0,0.2 | 0,0.64, 0.16,0,0.2 | / | 1 | 1 |
| t5 | / | 0,0,0.8, 0,0.2 | 0,0.68, 0.12,0,0.2 | / | 1 | 1 |
| t6 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.43, 0.31,0,0.2 | 0.16,0.64, 0,0,0.2 | 1 | 1 |
| t7 | 0,0.8,0, 0,0.2 | 0,0.11, 0.69,0,0.2 | 0,0.68, 0.12,0,0.2 | 0.25,0.54, 0,0,0.2 | 1 | 1 |
| t8 | / | 0,0.33, 0.47,0,0.2 | 0,0.53, 0.27,0,0.2 | / | 1 | 1 |
表7 目标2识别中证据修正及信度转换结果
Tab. 7 Evidence correction and reliability conversion results in target 2 identification
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | / | 0,0,0.8, 0,0.2 | 0,0.48, 0.32,0,0.2 | / | 1 | 1 |
| t2 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.59, 0.21,0,0.2 | 0.33,0.46, 0,0,0.2 | 1 | 1 |
| t3 | / | 0,0,0.8, 0,0.2 | 0,0.55, 0.24,0,0.2 | / | 1 | 1 |
| t4 | / | 0,0,0.8, 0,0.2 | 0,0.64, 0.16,0,0.2 | / | 1 | 1 |
| t5 | / | 0,0,0.8, 0,0.2 | 0,0.68, 0.12,0,0.2 | / | 1 | 1 |
| t6 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.43, 0.31,0,0.2 | 0.16,0.64, 0,0,0.2 | 1 | 1 |
| t7 | 0,0.8,0, 0,0.2 | 0,0.11, 0.69,0,0.2 | 0,0.68, 0.12,0,0.2 | 0.25,0.54, 0,0,0.2 | 1 | 1 |
| t8 | / | 0,0.33, 0.47,0,0.2 | 0,0.53, 0.27,0,0.2 | / | 1 | 1 |
| 规则 | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 |
|---|---|---|---|---|---|---|---|---|
| m2规则 | Ⅲ18 | Ⅲ4 | Ⅲ18 | Ⅲ18 | Ⅲ18 | Ⅲ4 | Ⅲ4 | Ⅲ18 |
| m3规则 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 |
| m4规则 | Ⅰ18 | Ⅰ4 | Ⅰ18 | Ⅰ18 | Ⅰ18 | Ⅰ4 | Ⅰ4 | Ⅰ18 |
表8 目标2识别中规则选取及切换
Tab. 8 Rule selection and switching in target 2 identification
| 规则 | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 |
|---|---|---|---|---|---|---|---|---|
| m2规则 | Ⅲ18 | Ⅲ4 | Ⅲ18 | Ⅲ18 | Ⅲ18 | Ⅲ4 | Ⅲ4 | Ⅲ18 |
| m3规则 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 |
| m4规则 | Ⅰ18 | Ⅰ4 | Ⅰ18 | Ⅰ18 | Ⅰ18 | Ⅰ4 | Ⅰ4 | Ⅰ18 |
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.186 6 | 0.216 0 | 0.357 3 | 0.239 9 | 0.000 0 | 0.000 2 | 0.000 0 |
| t2 | 0.000 0 | 0.282 6 | 0.466 4 | 0.250 6 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.052 7 | 0.194 1 | 0.549 6 | 0.202 9 | 0.000 0 | 0.000 7 | 0.000 0 |
| t4 | 0.044 9 | 0.156 0 | 0.635 8 | 0.161 8 | 0.000 0 | 0.000 5 | 0.000 0 |
| t5 | 0.044 6 | 0.113 4 | 0.719 0 | 0.122 0 | 0.000 0 | 0.000 1 | 0.000 0 |
| t6 | 0.000 0 | 0.104 5 | 0.786 0 | 0.094 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.000 0 | 0.097 9 | 0.823 0 | 0.079 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.031 7 | 0.077 8 | 0.817 3 | 0.073 0 | 0.000 0 | 0.000 2 | 0.000 0 |
表9 SR-EN方法对目标2的识别结果
Tab. 9 Identification results of SR-EN method for target 2
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.186 6 | 0.216 0 | 0.357 3 | 0.239 9 | 0.000 0 | 0.000 2 | 0.000 0 |
| t2 | 0.000 0 | 0.282 6 | 0.466 4 | 0.250 6 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.052 7 | 0.194 1 | 0.549 6 | 0.202 9 | 0.000 0 | 0.000 7 | 0.000 0 |
| t4 | 0.044 9 | 0.156 0 | 0.635 8 | 0.161 8 | 0.000 0 | 0.000 5 | 0.000 0 |
| t5 | 0.044 6 | 0.113 4 | 0.719 0 | 0.122 0 | 0.000 0 | 0.000 1 | 0.000 0 |
| t6 | 0.000 0 | 0.104 5 | 0.786 0 | 0.094 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.000 0 | 0.097 9 | 0.823 0 | 0.079 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.031 7 | 0.077 8 | 0.817 3 | 0.073 0 | 0.000 0 | 0.000 2 | 0.000 0 |
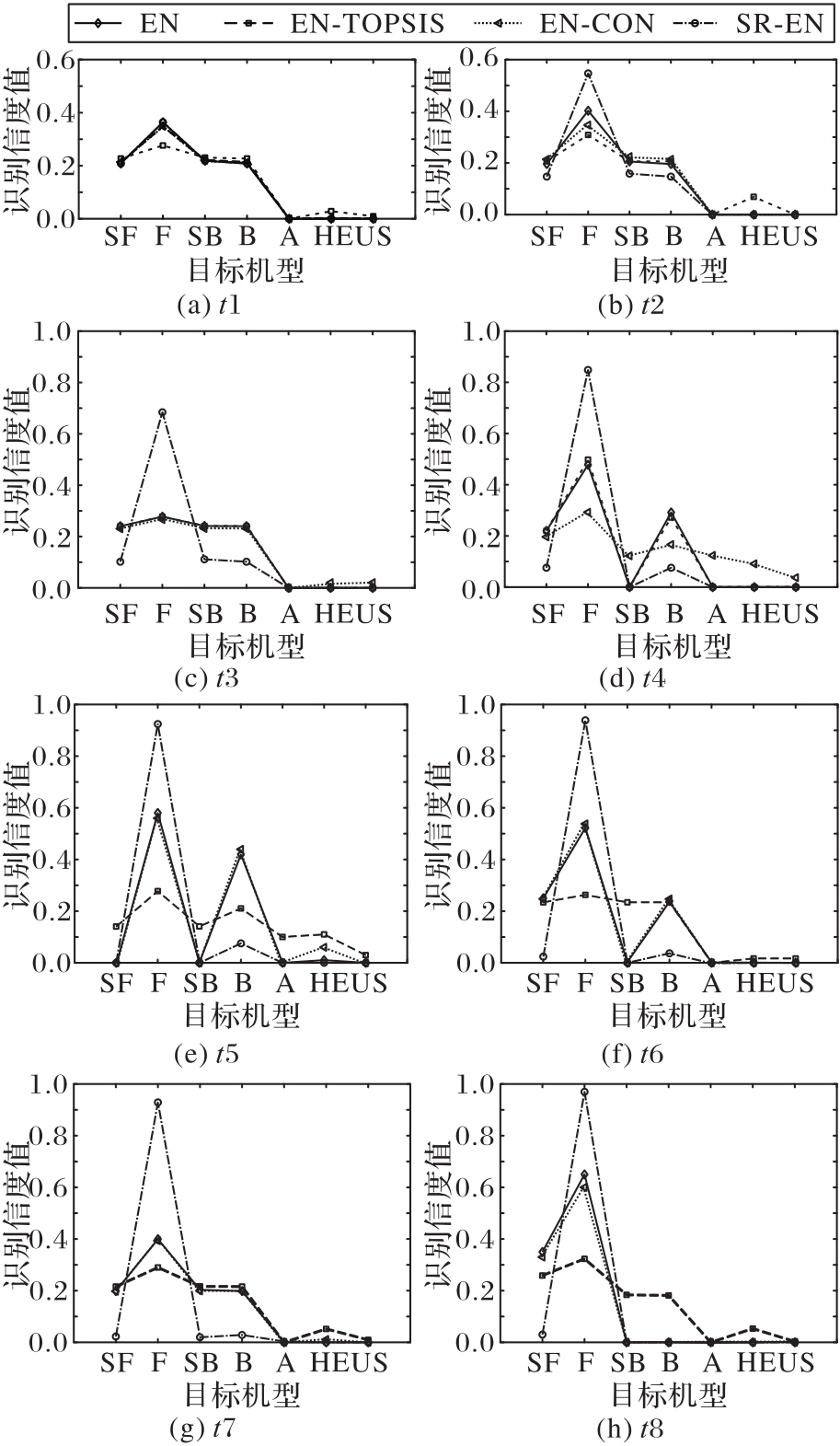
图6 4种方法对目标1的识别结果对比
Fig. 6 Comparison of identification results of four methods for target 1

图7 4种方法对目标2的识别结果对比
Fig. 7 Comparison of identification results of four methods for target 2
| 时刻 | |||||
|---|---|---|---|---|---|
| 0.0 | 0.3 | 0.5 | 0.8 | 1.0 | |
| t1 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 |
| t2 | 0.392 5 | 0.443 2 | 0.466 4 | 0.491 5 | 0.504 2 |
| t3 | 0.355 6 | 0.466 2 | 0.549 6 | 0.657 8 | 0.712 4 |
| t4 | 0.353 3 | 0.490 0 | 0.635 8 | 0.815 7 | 0.884 8 |
| t5 | 0.351 9 | 0.507 0 | 0.719 0 | 0.936 3 | 0.982 5 |
| t6 | 0.395 2 | 0.542 9 | 0.786 0 | 0.969 4 | 0.987 7 |
| t7 | 0.368 0 | 0.524 2 | 0.823 0 | 0.991 4 | 1.000 0 |
| t8 | 0.284 8 | 0.455 5 | 0.817 3 | 0.992 1 | 1.000 0 |
表10 权重ω敏感度分析实验结果(SB机型概率)比较
Tab. 10 Comparison of weight ω sensitivity analysis experimental results (SB type probability)
| 时刻 | |||||
|---|---|---|---|---|---|
| 0.0 | 0.3 | 0.5 | 0.8 | 1.0 | |
| t1 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 |
| t2 | 0.392 5 | 0.443 2 | 0.466 4 | 0.491 5 | 0.504 2 |
| t3 | 0.355 6 | 0.466 2 | 0.549 6 | 0.657 8 | 0.712 4 |
| t4 | 0.353 3 | 0.490 0 | 0.635 8 | 0.815 7 | 0.884 8 |
| t5 | 0.351 9 | 0.507 0 | 0.719 0 | 0.936 3 | 0.982 5 |
| t6 | 0.395 2 | 0.542 9 | 0.786 0 | 0.969 4 | 0.987 7 |
| t7 | 0.368 0 | 0.524 2 | 0.823 0 | 0.991 4 | 1.000 0 |
| t8 | 0.284 8 | 0.455 5 | 0.817 3 | 0.992 1 | 1.000 0 |
| 推理方法 | 平均运行时间 | 推理方法 | 平均运行时间 |
|---|---|---|---|
| EN | 0.113 6 | EN-CON | 0.139 5 |
| EN-TOPSIS | 0.116 5 | SR-EN | 0.128 7 |
表11 4种方法的平均运行时间比较 (s)
Tab. 11 Average running time comparison of four methods
| 推理方法 | 平均运行时间 | 推理方法 | 平均运行时间 |
|---|---|---|---|
| EN | 0.113 6 | EN-CON | 0.139 5 |
| EN-TOPSIS | 0.116 5 | SR-EN | 0.128 7 |
| 1 | LIN Z, XIE J Y. Research on improved evidence theory based on multi-sensor information fusion[J]. Scientific Reports, 2021, 11: No.9267. 10.1038/s41598-021-88814-3 |
| 2 | ZHAO G Z, CHEN A G, LU G X, et al. Data fusion algorithm based on fuzzy sets and D-S theory of evidence[J]. Tsinghua Science and Technology, 2020, 25(1): 12-19. 10.26599/tst.2018.9010138 |
| 3 | 吴强,姜礼平,季傲. 基于模糊集和D-S证据理论的空中作战目标识别[J]. 指挥控制与仿真, 2015, 37(4): 54-58. |
| WU Q, JIANG L P, JI A. Aircraft target identification based on fuzzy sets and D-S evidence theory in air operation[J]. Command Control and Simulation, 2015, 37(4): 54-58. | |
| 4 | 赵静,关欣,刘海桥. 冲突证据决策新方法及应用[J]. 北京航空航天大学学报, 2019, 45(9): 1838-1847. |
| ZHAO J, GUAN X, LIU H Q. A new conflict evidence decision method and its application[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1838-1847. | |
| 5 | 高晓阳,王刚. 基于改进时域证据融合的目标识别[J]. 系统工程与电子技术, 2018, 40(12): 2629-2635. 10.3969/j.issn.1001-506X.2018.12.02 |
| GAO X Y, WANG G. Target identification based on improved combination of temporal evidence sources[J]. Systems Engineering and Electronics, 2018, 40(12): 2629-2635. 10.3969/j.issn.1001-506X.2018.12.02 | |
| 6 | 尹东亮,黄晓颖,吴艳杰,等. 基于云模型和改进D-S证据理论的目标识别决策方法研究[J]. 航空学报, 2021, 42(12): No.324768. |
| YIN D L, HUANG X Y, WU Y J, et al. Target recognition decision method based on cloud model and improved D-S evidence theory[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): No.324768. | |
| 7 | MI J H, LU N, LI Y F, et al. An evidential network-based hierarchical method for system reliability analysis with common cause failures and mixed uncertainties[J]. Reliability Engineering and System Safety, 2022, 220: No.108295. 10.1016/j.ress.2021.108295 |
| 8 | 王昱,章卫国,傅莉,等. 基于改进证据网络的空战动态态势估计方法[J]. 航空学报, 2015, 36(12): 3896-3909. |
| WANG Y, ZHANG W G, FU L, et al. Dynamic situation assessment method of aerial warfare based on improved evidence network[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3896-3909. | |
| 9 | DUAN R X, LIN Y N, HU L F. Reliability evaluation for complex systems based on interval-valued triangular fuzzy weighted mean and evidence network[J]. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2018, 12(4): No.JAMDSM0087. 10.1299/jamdsm.2018jamdsm0087 |
| 10 | BOUGOFA M, BOUAFIA A, BELLAOUAR A. Availability assessment of complex systems under parameter uncertainty using dynamic evidential networks[J]. International Journal of Performability Engineering, 2020, 16(4): 510-519. 10.23940/ijpe.20.04.p2.510519 |
| 11 | ZUO L, XIAHOU T F, LIU Y. Reliability assessment of systems subject to interval-valued probabilistic common cause failure by evidential networks[J]. Journal of Intelligent and Fuzzy Systems, 2019, 36(4): 3711-3723. 10.3233/jifs-18290 |
| 12 | DU J H, HU M H, ZHANG W N. Missing data problem in the monitoring system: a review[J]. IEEE Sensors Journal, 2020: 20(23): 13984-13998. 10.1109/jsen.2020.3009265 |
| 13 | HUANG G L. Missing data filling method based on linear interpolation and lightGBM[J]. Journal of Physics: Conference Series, 2021, 1754: No.012187. 10.1088/1742-6596/1754/1/012187 |
| 14 | 陈海洋,刘喜庆,环晓敏. 一步预测的SVDDBN缺失数据插补算法[J]. 计算机工程与应用, 2020, 56(7): 81-87. |
| CHEN H Y, LIU X Q, HUAN X M. One-step prediction SVDDBN missing data interpolation algorithm[J]. Computer Engineering and Applications, 2020, 56(7): 81-87. | |
| 15 | JOHNY V, PHILIP M, AUGUSTINE S. Methods to handle incomplete data[J]. MAMC Journal of Medical Sciences, 2020, 6(3): 194-198. 10.4103/mamcjms.mamcjms_54_20 |
| 16 | RAHMAN M G, ISLAM M Z. Missing value imputation using a fuzzy clustering-based EM approach[J]. Knowledge and Information Systems, 2016, 46(2): 389-422. 10.1007/s10115-015-0822-y |
| 17 | QU S Q, SALLAK M, SCHÖN W, et al. A valuation-based system approach for risk assessment of belief rule-based expert systems[J]. Information Sciences, 2018, 466: 323-336. 10.1016/j.ins.2018.04.039 |
| 18 | 梁复台,周焰,陈新,等. 基于TOPSIS-BORDA连续时间片的空中目标识别算法[J]. 兵器装备工程学报, 2021, 42(11): 169-173. |
| LIANG F T, ZHOU Y, CHEN X, et al. Aerial target recognition algorithm based on TOPSIS-BORDA continuous time slice[J]. Journal of Ordnance Equipment Engineering, 2021, 42(11): 169-173. |
| [1] | 李强 白少雄 熊源 袁薇. 基于视觉大模型隐私保护的监控图像定位[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [2] | 薛雅丽 徐忠敏 刘世豪. 基于多级小波残差网络的重力数据去噪方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [3] | 况世雄 姚俊波 陆佳炜 王琪冰 肖刚. 基于动态图卷积网络的电梯乘客异常行为数据增强方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [4] | 康斌 陈斌 王俊杰 李昱林 赵军智 咸伟志. 基于多粒度共享语义中心关联的文本到人物检索方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [5] | 张庆 杨凡 方宇涵. 基于多模态信息融合的中文拼写纠错算法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [6] | 王昊 王金伟 程鑫 张家伟 吴昊 罗向阳 马宾. 彩色图像JPEG重压缩取证综述(ChinaMFS 2024+14)[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [7] | 王磊 胡节 彭博. 用于半监督火灾检测的分布自适应和动态课程伪标签框架[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [8] | 刘晋文 王磊 马博 董瑞 杨雅婷 艾合塔木江·艾合麦提 王欣乐. 基于弱监督模态语义增强的多模态有害信息检测方法 [J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [9] | 夏雨禾 王晓东 何启学. 基于频域增强图变分学习的时间序列异常检测[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [10] | 殷兵, 凌震华, 林垠, 奚昌凤, 刘颖. 兼容缺失模态推理的情感识别方法[J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [11] | 王子怡 李卫军 刘雪洋 丁建平 刘世侠 苏易礌. 基于Swin Transformer与多尺度特征融合的图像描述方法#br# [J]. 《计算机应用》唯一官方网站, 0, (): 0-0. |
| [12] | 赵欣, 李鑫杰, 徐健, 刘步云, 毕祥. 基于卷积神经网络与Transformer并行的医学图像配准模型[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3915-3921. |
| [13] | 何长久, 杨婧涵, 周丕宇, 边昕烨, 吕明明, 董迪, 付岩, 王海鹏. 基于Transformer和门控循环单元的肽序列理论串联质谱图预测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3958-3964. |
| [14] | 熊炜, 陈奕博, 张丽真, 杨茜, 邹勤. 利用多帧序列影像的自监督单目深度估计[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3907-3914. |
| [15] | 付可意, 王高才, 邬满. 基于改进区域提议网络和特征聚合小样本目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3790-3797. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||