


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (3): 938-944.DOI: 10.11772/j.issn.1001-9081.2023030368
所属专题: 多媒体计算与计算机仿真
蒋占军, 吴佰靖( ), 马龙, 廉敬
), 马龙, 廉敬
收稿日期:2023-04-07
修回日期:2023-05-22
接受日期:2023-05-24
发布日期:2023-06-15
出版日期:2024-03-10
通讯作者:
吴佰靖
作者简介:蒋占军(1975—),男,宁夏中卫人,教授,博士,主要研究方向:数字图像处理、未来移动通信关键技术、无线网络规划与优化基金资助:
Zhanjun JIANG, Baijing WU(), Long MA, Jing LIAN
Received:2023-04-07
Revised:2023-05-22
Accepted:2023-05-24
Online:2023-06-15
Published:2024-03-10
Contact:
Baijing WU
About author:JIANG Zhanjun, born in 1975, Ph. D., professor. His research interests include digital image processing, key technologies for future mobile communication, wireless network planning and optimization.Supported by:摘要:
针对小目标水漂垃圾形态多变、分辨率低且信息有限,导致检测效果不理想的问题,提出一种改进的Faster-RCNN(Faster Regions with Convolutional Neural Network)水漂垃圾检测算法MP-Faster-RCNN(Faster-RCNN with Multi-scale feature and Polarized self-attention)。首先,建立黄河兰州段小目标水漂垃圾数据集,将空洞卷积结合ResNet-50代替原来的VGG-16(Visual Geometry Group 16)作为主干特征提取网络,扩大感受野以提取更多小目标特征;其次,在区域生成网络(RPN)利用多尺度特征,设置3×3和1×1的两层卷积,补偿单一滑动窗口造成的特征丢失;最后,在RPN前加入极化自注意力,进一步利用多尺度和通道特征提取更细粒度的多尺度空间信息和通道间依赖关系,生成具有全局特征的特征图,实现更精确的目标框定位。实验结果表明,MP-Faster-RCNN能有效提高水漂垃圾检测精度,与原始Faster-RCNN相比,平均精度均值(mAP)提高了6.37个百分点,模型大小从521 MB降到了108 MB,且在同一训练批次下收敛更快。
中图分类号:
蒋占军, 吴佰靖, 马龙, 廉敬. 多尺度特征和极化自注意力的Faster-RCNN水漂垃圾识别[J]. 计算机应用, 2024, 44(3): 938-944.
Zhanjun JIANG, Baijing WU, Long MA, Jing LIAN. Faster-RCNN water-floating garbage recognition based on multi-scale feature and polarized self-attention[J]. Journal of Computer Applications, 2024, 44(3): 938-944.
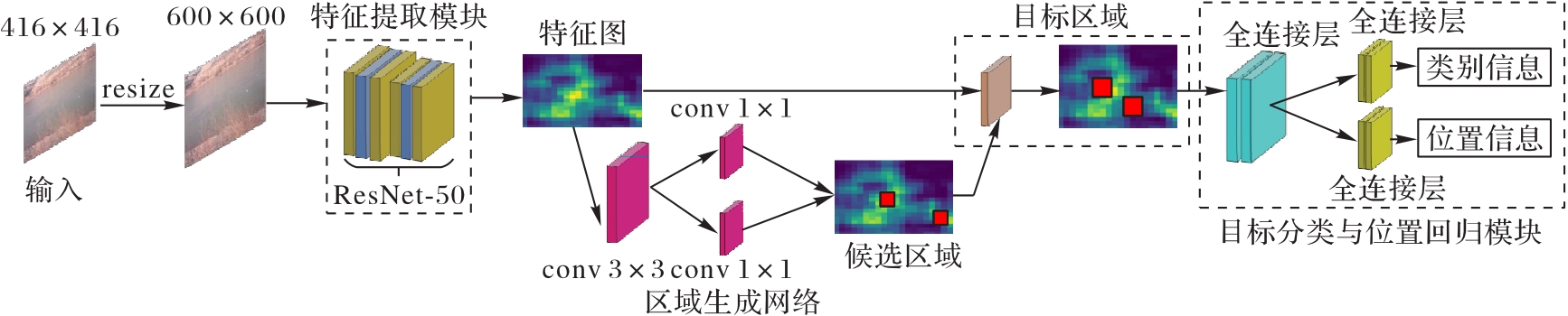
图1 Faster-RCNN的结构
Fig. 1 Structure of Faster-RCNN

图2 K-Means聚类结果
Fig. 2 K-Means clustering results
| 聚类中心 | 长/像素 | 宽/像素 | 长宽比 |
|---|---|---|---|
| 1 | 19 | 20 | 1∶0.9 |
| 2 | 27 | 29 | 1∶0.9 |
| 3 | 30 | 52 | 1∶0.6 |
| 4 | 47 | 41 | 1∶1.2 |
| 5 | 45 | 76 | 1∶0.6 |
| 6 | 94 | 62 | 1∶1.5 |
| 7 | 64 | 110 | 1∶0.4 |
| 8 | 115 | 153 | 1∶0.8 |
| 9 | 147 | 360 | 1∶0.4 |
表1 聚类中心和长宽比选择
Tab. 1 Cluster centers and aspect ratio selections
| 聚类中心 | 长/像素 | 宽/像素 | 长宽比 |
|---|---|---|---|
| 1 | 19 | 20 | 1∶0.9 |
| 2 | 27 | 29 | 1∶0.9 |
| 3 | 30 | 52 | 1∶0.6 |
| 4 | 47 | 41 | 1∶1.2 |
| 5 | 45 | 76 | 1∶0.6 |
| 6 | 94 | 62 | 1∶1.5 |
| 7 | 64 | 110 | 1∶0.4 |
| 8 | 115 | 153 | 1∶0.8 |
| 9 | 147 | 360 | 1∶0.4 |

图3 常规卷积和空洞卷积感受野
Fig. 3 Receptive fields of regular convolution and atrous convolution
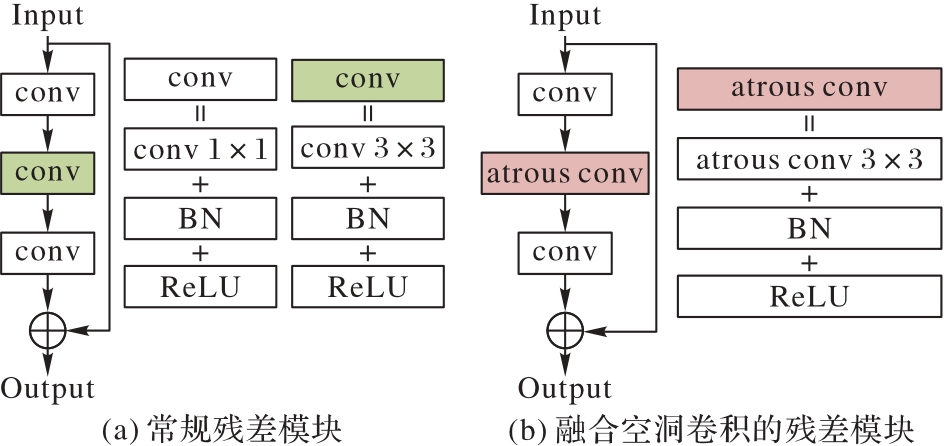
图4 常规残差模块和融合空洞卷积的残差模块
Fig. 4 Conventional residual module and residual module with atrous convolution

图5 融合空洞卷积的ResNet-50结构
Fig. 5 Structure of ResNet-50 combining atrous convolution

图6 区域生成模块改进
Fig. 6 Region proposal module improvement
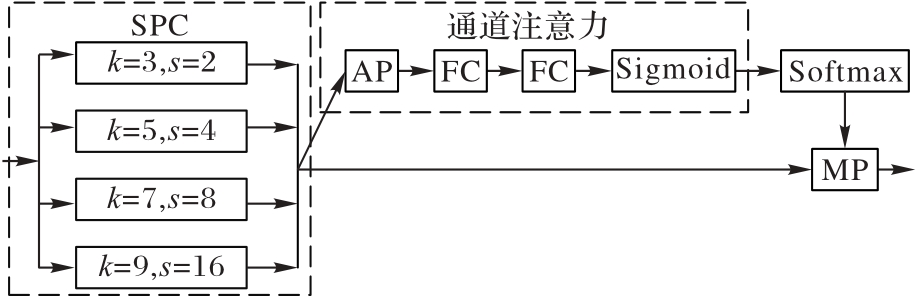
图7 极化自注意力机制
Fig. 7 Polarized self-attention mechanism

图8 数据采集地点
Fig. 8 Data collection locations
| 序号 | 类别 | 举例 | 样本数 |
|---|---|---|---|
| 1 | plastic | 塑料袋、塑料瓶、泡沫等 | 2 031 |
| 2 | paper | 牛奶盒、文件袋等 | 1 239 |
| 3 | glass | 玻璃罐、酒瓶等 | 568 |
| 4 | plant | 浮藻及水草、树叶等 | 970 |
| 5 | metal | 易拉罐、汽油桶等 | 653 |
| 6 | fabric/fiber | 绳子、布袋子、破衣服等 | 332 |
| 7 | wood | 木制品、树枝、木头等 | 519 |
| 8 | others | 无法辨识的材料等 | 566 |
表2 水漂垃圾分类
Tab. 2 Water-floating garbage classification
| 序号 | 类别 | 举例 | 样本数 |
|---|---|---|---|
| 1 | plastic | 塑料袋、塑料瓶、泡沫等 | 2 031 |
| 2 | paper | 牛奶盒、文件袋等 | 1 239 |
| 3 | glass | 玻璃罐、酒瓶等 | 568 |
| 4 | plant | 浮藻及水草、树叶等 | 970 |
| 5 | metal | 易拉罐、汽油桶等 | 653 |
| 6 | fabric/fiber | 绳子、布袋子、破衣服等 | 332 |
| 7 | wood | 木制品、树枝、木头等 | 519 |
| 8 | others | 无法辨识的材料等 | 566 |
| 相机参数 | 值 | RTK参数 | 值 |
|---|---|---|---|
| 水平分辨率 | 180 dpi | 定位水平精度 | 0.25 m+1 ppmRMS |
| 垂直分辨率 | 180 dpi | 定位垂直精度 | 0.25 m+1 ppmRMS |
| 位深度 | 24 | 高程精度 | ±5 mm +1 ppm |
| 分辨率单位 | 2 | 动态测量精度 | ±8 mm+1 ppm |
| 颜色 | RGB | 星基增强系统差分定位 | 典型<5 m |
表3 数据采集设备参数设定
Tab. 3 Data collection device parameter settings
| 相机参数 | 值 | RTK参数 | 值 |
|---|---|---|---|
| 水平分辨率 | 180 dpi | 定位水平精度 | 0.25 m+1 ppmRMS |
| 垂直分辨率 | 180 dpi | 定位垂直精度 | 0.25 m+1 ppmRMS |
| 位深度 | 24 | 高程精度 | ±5 mm +1 ppm |
| 分辨率单位 | 2 | 动态测量精度 | ±8 mm+1 ppm |
| 颜色 | RGB | 星基增强系统差分定位 | 典型<5 m |

图9 水漂垃圾典型示例
Fig. 9 Typical examples of water-floating garbage

图10 epoch平均损失曲线
Fig. 10 epoch mean loss curve
| 模型 | mAP/% | Recall/% | 模型大小/MB |
|---|---|---|---|
| 模型1 | 65.02 | 70.56 | 521 |
| 模型2 | 68.51 | 72.57 | 105 |
| 模型3 | 69.48 | 73.22 | 106 |
| 模型4 | 71.39 | 74.16 | 108 |
表4 不同改进策略的指标对比
Tab. 4 Comparison of evaluating indicators among different improvement strategies
| 模型 | mAP/% | Recall/% | 模型大小/MB |
|---|---|---|---|
| 模型1 | 65.02 | 70.56 | 521 |
| 模型2 | 68.51 | 72.57 | 105 |
| 模型3 | 69.48 | 73.22 | 106 |
| 模型4 | 71.39 | 74.16 | 108 |
| 类别 | 模型1 | 模型2 | 模型3 | 模型4 |
|---|---|---|---|---|
| plastic | 78.96 | 81.35 | 82.94 | 83.61 |
| plant | 30.36 | 31.06 | 31.75 | 34.42 |
| others | 54.78 | 57.82 | 59.12 | 62.56 |
| metal | 64.20 | 69.30 | 70.37 | 73.02 |
| fabric/fiber | 72.56 | 79.06 | 79.28 | 80.62 |
| glass | 63.92 | 69.48 | 71.15 | 72.84 |
| wood | 84.65 | 85.03 | 85.54 | 86.74 |
| paper | 70.72 | 74.98 | 75.68 | 77.32 |
表5 不同改进策略的各个类别AP对比 (%)
Tab. 5 Comparison of APs with different improvement strategies unit:%
| 类别 | 模型1 | 模型2 | 模型3 | 模型4 |
|---|---|---|---|---|
| plastic | 78.96 | 81.35 | 82.94 | 83.61 |
| plant | 30.36 | 31.06 | 31.75 | 34.42 |
| others | 54.78 | 57.82 | 59.12 | 62.56 |
| metal | 64.20 | 69.30 | 70.37 | 73.02 |
| fabric/fiber | 72.56 | 79.06 | 79.28 | 80.62 |
| glass | 63.92 | 69.48 | 71.15 | 72.84 |
| wood | 84.65 | 85.03 | 85.54 | 86.74 |
| paper | 70.72 | 74.98 | 75.68 | 77.32 |
| 算法 | AP/% | mAP/% | 模型大小 /MB | Recall/% | 帧率/(frame·s-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| plastic | plant | others | paper | metal | fabric/fiber | glass | wood | |||||
| Faster-RCNN[ | 78.96 | 30.36 | 54.78 | 70.72 | 64.20 | 72.56 | 63.92 | 84.65 | 65.02 | 521 | 70.56 | 27.5 |
| YOLOv5s[ | 78.69 | 29.47 | 49.13 | 72.05 | 64.38 | 69.23 | 67.37 | 50.48 | 60.10 | 27 | 65.42 | 78.4 |
| CenterNet[ | 81.70 | 30.40 | 53.80 | 65.64 | 69.19 | 78.10 | 76.23 | 52.72 | 63.47 | 125 | 66.31 | 60.9 |
| SSD[ | 81.40 | 32.06 | 53.49 | 78.10 | 72.22 | 78.97 | 80.56 | 51.36 | 66.02 | 94 | 68.53 | 73.8 |
| MP-Faster-RCNN | 83.61 | 34.42 | 62.56 | 77.32 | 73.02 | 80.62 | 72.84 | 86.74 | 71.39 | 108 | 74.16 | 20.1 |
表6 各算法评价结果对比
Tab. 6 Evaluation result comparison of different algorithms
| 算法 | AP/% | mAP/% | 模型大小 /MB | Recall/% | 帧率/(frame·s-1) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| plastic | plant | others | paper | metal | fabric/fiber | glass | wood | |||||
| Faster-RCNN[ | 78.96 | 30.36 | 54.78 | 70.72 | 64.20 | 72.56 | 63.92 | 84.65 | 65.02 | 521 | 70.56 | 27.5 |
| YOLOv5s[ | 78.69 | 29.47 | 49.13 | 72.05 | 64.38 | 69.23 | 67.37 | 50.48 | 60.10 | 27 | 65.42 | 78.4 |
| CenterNet[ | 81.70 | 30.40 | 53.80 | 65.64 | 69.19 | 78.10 | 76.23 | 52.72 | 63.47 | 125 | 66.31 | 60.9 |
| SSD[ | 81.40 | 32.06 | 53.49 | 78.10 | 72.22 | 78.97 | 80.56 | 51.36 | 66.02 | 94 | 68.53 | 73.8 |
| MP-Faster-RCNN | 83.61 | 34.42 | 62.56 | 77.32 | 73.02 | 80.62 | 72.84 | 86.74 | 71.39 | 108 | 74.16 | 20.1 |

图11 各算法实验结果对比
Fig. 11 Experiment results comparison of different algorithms
| 1 | KONG S, TIAN M, QIU C, et al. IWSCR: an intelligent water surface cleaner robot for collecting floating garbage [J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(10): 6358-6368. 10.1109/tsmc.2019.2961687 |
| 2 | KHEKARE G S, DHANRE U T, DHANRE G T, et al. Design of optimized and innovative remotely operated machine for water surface garbage assortment [J]. International Journal of Computer Sciences and Engineering, 2019, 7(1): 113-117. 10.26438/ijcse/v7i1.113117 |
| 3 | LI N, HUANG H, WANG X, et al. Detection of floating garbage on water surface based on PC-Net [J]. Sustainability, 2022, 14(18): 11729. 10.3390/su141811729 |
| 4 | TOPOUZELIS K, PAPAGEORGIOU D, KARAGAITANAKIS A, et al. Remote sensing of sea surface artificial floating plastic targets with Sentinel-2 and unmanned aerial systems (Plastic Litter Project 2019) [J]. Remote Sensing, 2020, 12(12): 2013. 10.3390/rs12122013 |
| 5 | ARMITAGE S, AWTY-CARROLL K, CLEWLEY D, et al. Detection and classification of floating plastic litter using a vessel-mounted video camera and deep learning [J]. Remote Sensing, 2022, 14: 3425. 10.3390/rs14143425 |
| 6 | SUN X, LIU T, YU X, et al. Unmanned surface vessel visual object detection under all-weather conditions with optimized feature fusion network in YOLOv4 [J]. Journal of Intelligent & Robotic Systems, 2021, 103: 55. 10.1007/s10846-021-01499-8 |
| 7 | YI Z, YAO D, LI G, et al. Detection and localization for lake floating objects based on CA-faster R-CNN [J]. Multimedia Tools and Applications, 2022, 81(12): 17263-17281. 10.1007/s11042-022-12686-6 |
| 8 | LIN F, HOU T, JIN Q, et al. Improved YOLO based detection algorithm for floating debris in waterway [J]. Entropy, 2021, 23(9): 1111. 10.3390/e23091111 |
| 9 | CHEN Y, SONG B, WANG D, et al. An effective infrared small target detection method based on the human visual attention [J]. Infrared Physics & Technology, 2018, 95: 128-135. 10.1016/j.infrared.2018.10.033 |
| 10 | 贾可心,马正华,朱蓉,等.注意力机制改进轻量SSD模型的海面小目标检测[J]. 中国图象图形学报, 2022, 27(4): 1161-1175. 10.11834/jig.200517 |
| JIA K X, MA Z H, ZHU R, et al. Attention-mechanism-based light single shot multiBox detector modelling improvement for small object detection on the sea surface [J]. Journal of Image and Graphics, 2022, 27(4): 1161-1175. 10.11834/jig.200517 | |
| 11 | 秦强强,廖俊国,周弋荀.基于多分支混合注意力的小目标检测算法[J].计算机应用, 2023, 43(11): 3579-3586. 10.11772/j.issn.1001-9081.2022111660 |
| QIN Q Q, LIAO J G, ZHOU Y X. Small target detection algorithm based on multi branch mixed attention [J]. Journal of Computer Applications, 2023, 43(11): 3579-3586. 10.11772/j.issn.1001-9081.2022111660 | |
| 12 | YU J, LIN Y, ZHU Y, et al. Segmentation of river scenes based on water surface reflection mechanism [J]. Applied Sciences, 2020, 10(7): 2471. 10.3390/app10072471 |
| 13 | WENG Y, ZHOU T, LI Y, et al. NAS-Unet: neural architecture search for medical image segmentation [J]. IEEE Access, 2019, 7: 44247-44257. 10.1109/access.2019.2908991 |
| 14 | ZHANG H, ZU K, LU J, et al. EPSANet: an efficient pyramid squeeze attention block on convolutional neural network [C]// Proceedings of the 2022 Asian Conference on Computer Vision. Cham: Springer, 2022: 541-557. 10.1007/978-3-031-26313-2_33 |
| 15 | 杜达宽,孙剑峰,丁源雪,等.基于GM-APD激光雷达数据融合的小目标检测[J].光学精密工程,2023,31(3):393-403. 10.37188/ope.20233103.0393 |
| DU D K, SUN J F, DING Y X, et al. Small object detection based on GM-APD lidar data fusion [J]. Optics and Precision Engineering, 2023,31 (3): 393-403. 10.37188/ope.20233103.0393 | |
| 16 | EVERINGHAM M, VAN GOOL L, WILLIAMS C K I, et al. The PASCAL Visual Object Classes (VOC) challenge [J]. International Journal of Computer Vision, 2009, 88: 303-338. 10.1007/s11263-009-0275-4 |
| 17 | DUAN K, BAI S, XIE L, et al. CenterNet: keypoint triplets for object detection [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6569-6578. 10.1109/iccv.2019.00667 |
| 18 | JOCHER G, STOKEN A, BOROVEC J, et al. ultralytics/yolov5: v4.0 - nn.SiLU() activations, Weights & Biases logging, PyTorch Hub integration [EB/OL]. [2023-01-15]. . |
| 19 | SONG Z, FU L, WU J, et al. Kiwifruit detection in field images using Faster R-CNN with VGG16 [J]. IFAC-PapersOnLine, 2019, 52(30): 76-81. 10.1016/j.ifacol.2019.12.500 |
| 20 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// Proceedings of the 2016 European Conference on Computer Vision. Cham: Springer, 2016: 21-37. 10.1007/978-3-319-46448-0_2 |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 赵志强, 马培红, 黑新宏. 基于双重注意力机制的人群计数方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2886-2892. |
| [3] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [4] | 张英俊, 李牛牛, 谢斌红, 张睿, 陆望东. 课程学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2326-2333. |
| [5] | 姬张建, 杜娜. 基于改进VariFocalNet的微小目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2200-2207. |
| [6] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [7] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [8] | 刘越, 刘芳, 武奥运, 柴秋月, 王天笑. 基于自注意力机制与图卷积的3D目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1972-1977. |
| [9] | 邓亚平, 李迎江. YOLO算法及其在自动驾驶场景中目标检测综述[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1949-1958. |
| [10] | 耿焕同, 刘振宇, 蒋骏, 范子辰, 李嘉兴. 基于改进YOLOv8的嵌入式道路裂缝检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1613-1618. |
| [11] | 宋霄罡, 张冬冬, 张鹏飞, 梁莉, 黑新宏. 面向复杂施工环境的实时目标检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1605-1612. |
| [12] | 封筠, 毕健康, 霍一儒, 李家宽. 轻量化沥青路面裂缝图像分割网络PIPNet[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1520-1526. |
| [13] | 李鸿天, 史鑫昊, 潘卫国, 徐成, 徐冰心, 袁家政. 融合多尺度和注意力机制的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1437-1444. |
| [14] | 陈天华, 朱家煊, 印杰. 基于注意力机制的鸟类识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1114-1120. |
| [15] | 王伟, 赵春辉, 唐心瑶, 席刘钢. 自适应地平线约束下的车辆三维检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 909-915. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||