


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (7): 2351-2360.DOI: 10.11772/j.issn.1001-9081.2024070985
于平平1, 闫玉婷1, 唐心亮1( ), 苏鹤2, 王建超1
), 苏鹤2, 王建超1
收稿日期:2024-07-15
修回日期:2024-10-11
接受日期:2024-10-11
发布日期:2025-07-10
出版日期:2025-07-10
通讯作者:
唐心亮
作者简介:于平平(1984—),女,河北石家庄人,副教授,博士,主要研究方向:计算机视觉、人工智能基金资助:
Pingping YU1, Yuting YAN1, Xinliang TANG1(), He SU2, Jianchao WANG1
Received:2024-07-15
Revised:2024-10-11
Accepted:2024-10-11
Online:2025-07-10
Published:2025-07-10
Contact:
Xinliang TANG
About author:YU Pingping, born in 1984, Ph. D., associate professor. Her research interests include computer vision, artificial intelligence.Supported by:摘要:
在输电线路巡检任务中,采用深度学习技术实现施工机械运动的有效跟踪对智能电网建设至关重要。针对目标间遮挡干扰以及误检漏检造成的多目标跟踪性能显著下降的问题,提出一种改进YOLOv5s与优化ByteTrack相结合的多目标跟踪算法。在目标检测部分:首先,采用轻量级的Ghost卷积和SimAM构建SGC3 (SimAM and Ghost convolution with C3)模块,以提高特征利用率,并减少算法冗余计算;其次,在主干网络的深层,提出卷积引导的三重注意力模块R-Triplet(RFAConv with Triplet attention),从而利用多分支结构增强算法跨维度信息交互,并抑制不相关背景信息来提高目标的关联能力;最后,在特征融合部分添加多分支感受野模块(MRB),以利用空洞卷积扩大目标感受野,并增强多尺度目标全局特征信息的复用。在目标跟踪部分:在ByteTrack算法的基础上,根据施工机械的运动特点,提出一种自适应计算噪声尺度的NSA(Noise Scale Adaptively)卡尔曼滤波算法,以降低低质量检测框对滤波算法性能的影响;同时,在数据关联部分引入高斯平滑插值算法(GSI),从而进一步完善多目标跟踪的效果。实验结果表明,所提CRM-YOLOv5s算法的平均精度均值(mAP)达到了97.4%,与基线算法YOLOv5s相比提升了3.8个百分点,参数量和浮点运算量分别减少了0.28×106和1.8 GFLOPs,可见该算法在多种应用场景下的泛化能力更强。此外,相较于原YOLOv5s+ByteTrack跟踪算法,所提CRM-YOLOv5s算法与改进后的ByteTrack算法相结合后的多目标跟踪准确度(MOTA)提升了4.5个百分点,目标身份切换次数(IDs)减少了15,且获得了较高的推理速度,可见该算法适用于输电线路场景下施工机械的多目标跟踪任务。
中图分类号:
于平平, 闫玉婷, 唐心亮, 苏鹤, 王建超. 输电线路场景下的施工机械多目标跟踪算法[J]. 计算机应用, 2025, 45(7): 2351-2360.
Pingping YU, Yuting YAN, Xinliang TANG, He SU, Jianchao WANG. Multi-object tracking algorithm for construction machinery in transmission line scenarios[J]. Journal of Computer Applications, 2025, 45(7): 2351-2360.
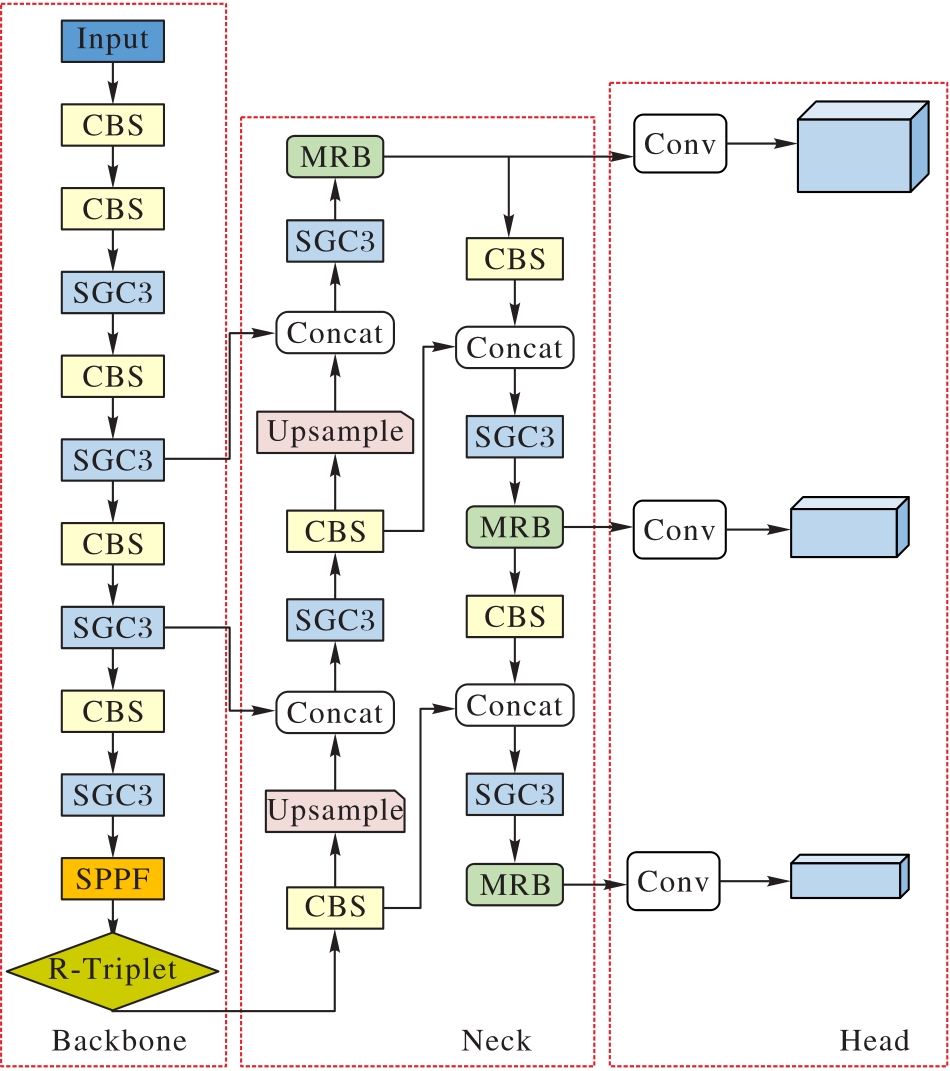
图1 CRM-YOLOv5s网络结构
Fig. 1 CRM-YOLOv5s network structure
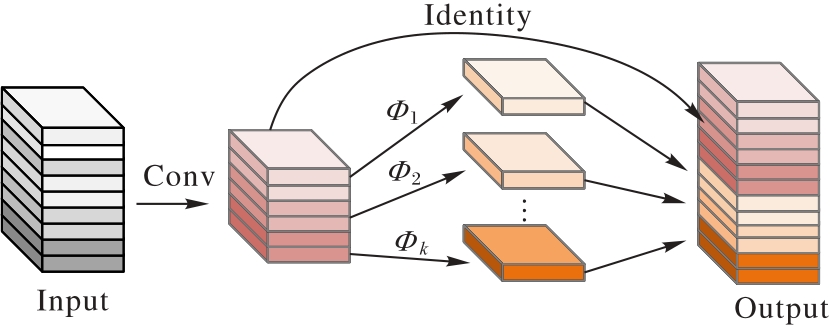
图2 Ghost卷积
Fig. 2 Ghost convolution
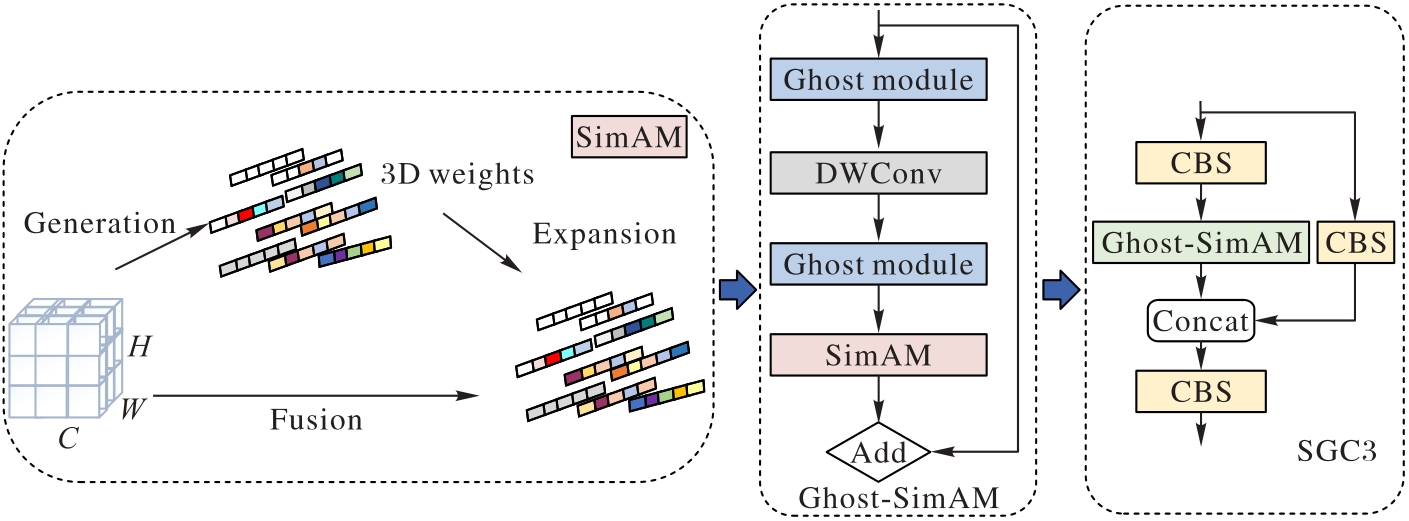
图3 SGC3模块结构
Fig. 3 Structure of SGC3 module
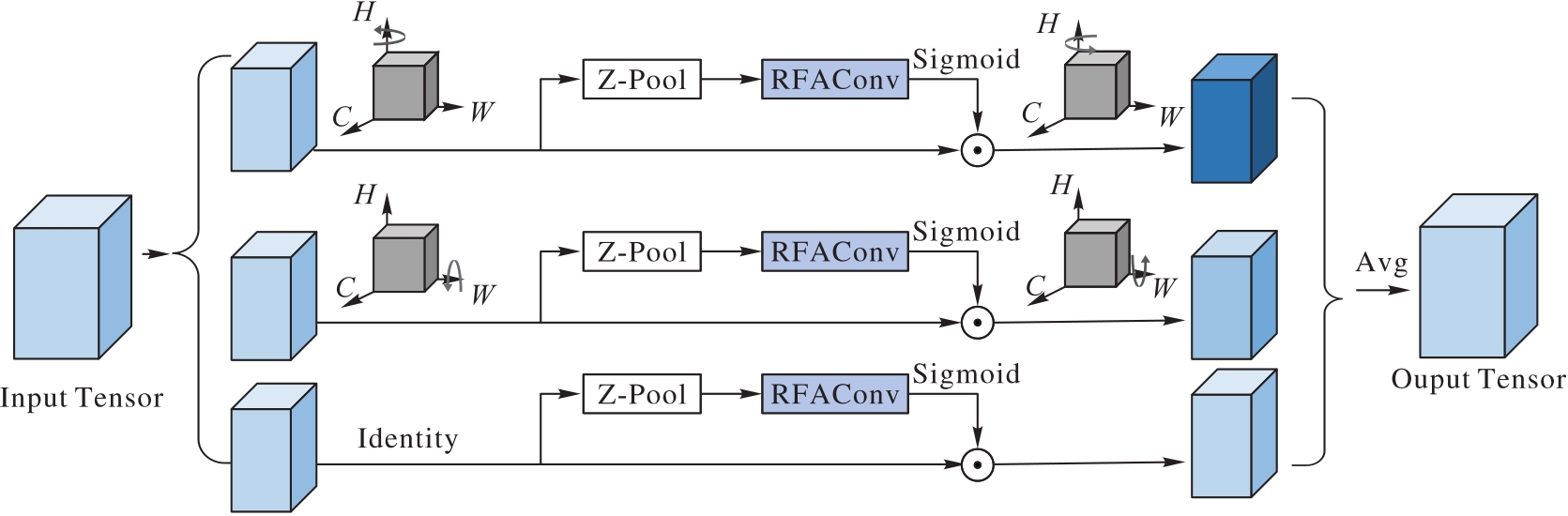
图4 R-Triplet模块结构
Fig. 4 Structure of R-Triplet module
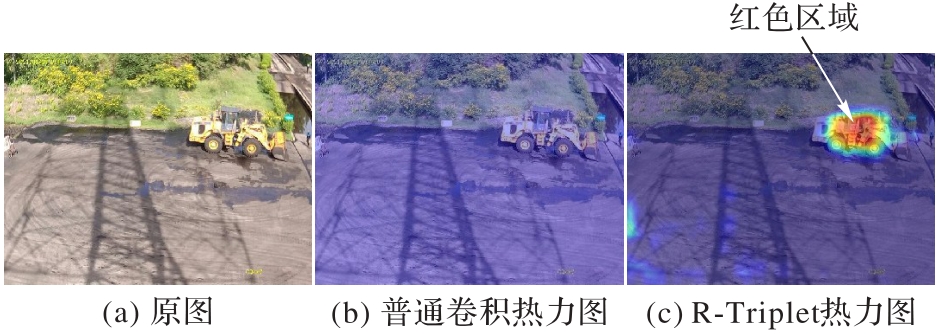
图5 热力图的可视化结果
Fig. 5 Visualization results of heatmaps
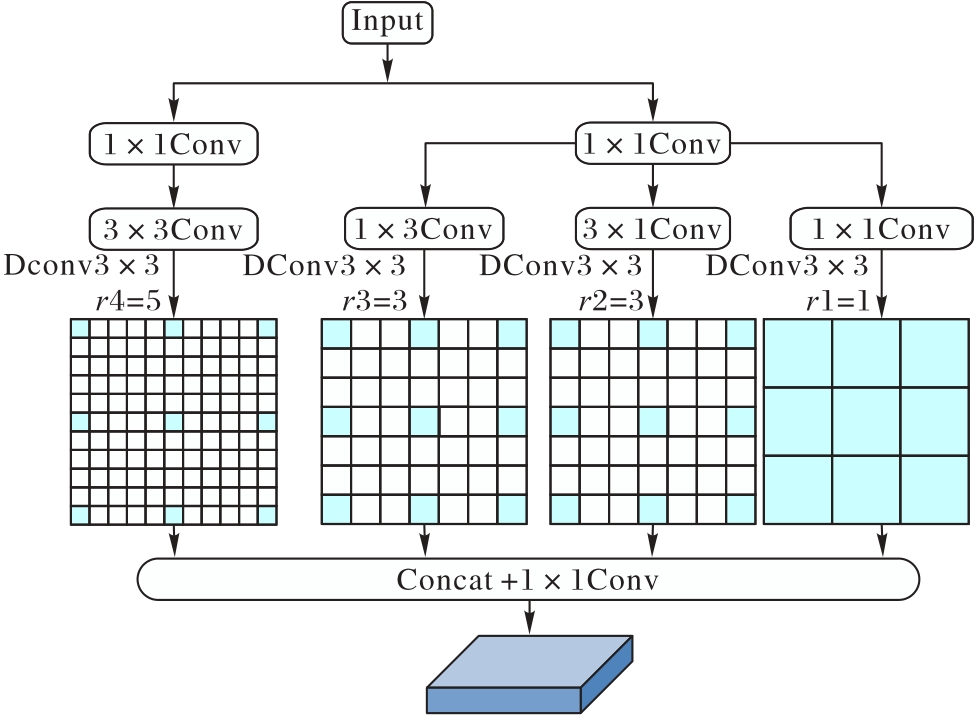
图6 MRB模块结构
Fig. 6 Structure of MRB module
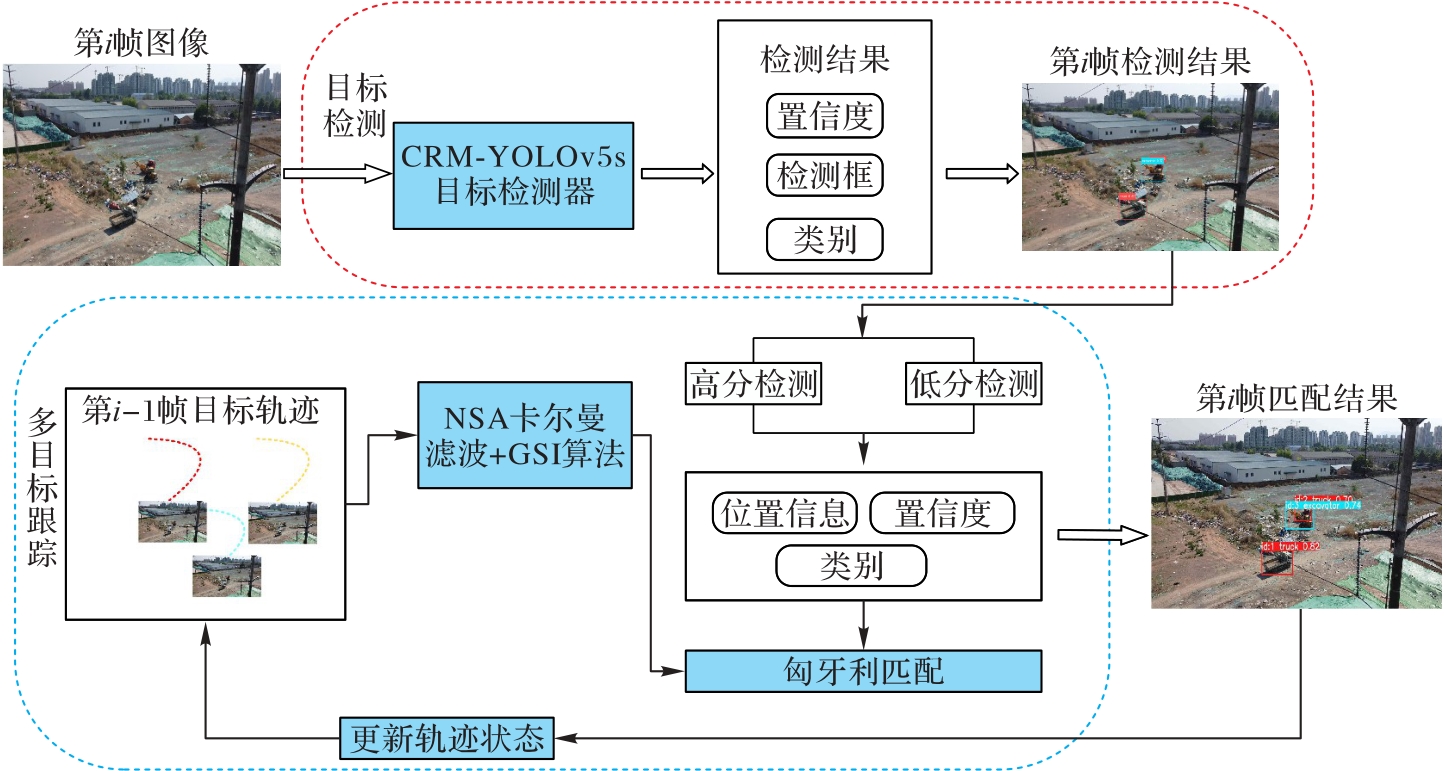
图7 基于CRM-YOLOv5s的多目标跟踪算法框架
Fig. 7 Framework of multi-object tracking algorithm based on CRM-YOLOv5s
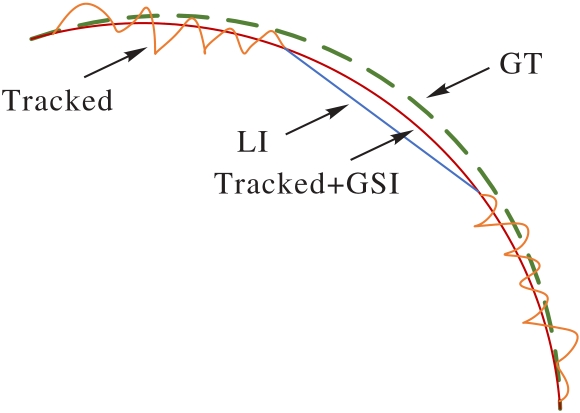
图8 GSI插值算法
Fig. 8 GSI interpolation algorithm
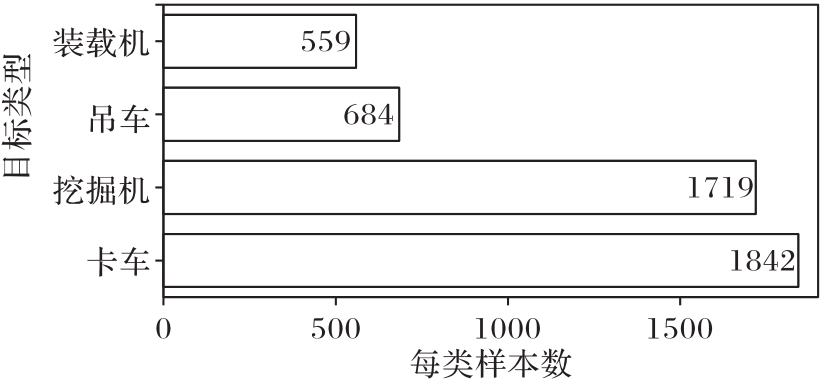
图9 目标检测数据集的标签分布
Fig. 9 Label distribution of object detection dataset
| 参数 | 数值 |
|---|---|
| epochs | 300 |
| batch size | 16 |
| image size | 640 |
| optimizer | SGD |
| momentum | 0.937 |
| weight-decay | 0.000 5 |
表1 实验参数设置
Tab. 1 Experimental parameter setting
| 参数 | 数值 |
|---|---|
| epochs | 300 |
| batch size | 16 |
| image size | 640 |
| optimizer | SGD |
| momentum | 0.937 |
| weight-decay | 0.000 5 |
| 空洞率参数组合 | mAP/%↑ | 浮点运算量/GFLOPs↓ |
|---|---|---|
| r1=1, r2=3, r3=3, r4=5 | 95.7 | 16.4 |
| r1=3, r2=3, r3=3, r4=5 | 95.5 | 16.5 |
| r1=3, r2=5, r3=5, r4=7 | 95.3 | 16.5 |
表2 空洞率参数的消融实验结果
Tab. 2 Ablation experiment results of dilation rate parameters
| 空洞率参数组合 | mAP/%↑ | 浮点运算量/GFLOPs↓ |
|---|---|---|
| r1=1, r2=3, r3=3, r4=5 | 95.7 | 16.4 |
| r1=3, r2=3, r3=3, r4=5 | 95.5 | 16.5 |
| r1=3, r2=5, r3=5, r4=7 | 95.3 | 16.5 |
| 实验 | SGC3 | R-Triplet | MRB | mAP/%↑ | 模型大小/MB↓ | 浮点运算量/GFLOPs↓ | 参数量/106↓ | 帧率/(frame·s-1)↑ |
|---|---|---|---|---|---|---|---|---|
| 实验1 | ― | ― | ― | 93.6 | 13.7 | 16.0 | 7.03 | 51.2 |
| 实验2 | √ | ― | ― | 94.8 | 11.6 | 12.6 | 5.89 | 65.3 |
| 实验3 | ― | √ | ― | 94.2 | 13.8 | 16.0 | 7.10 | 50.8 |
| 实验4 | ― | ― | √ | 94.4 | 13.8 | 16.2 | 7.11 | 49.1 |
| 实验5 | √ | √ | ― | 96.3 | 12.0 | 12.6 | 5.89 | 63.0 |
| 实验6 | √ | √ | √ | 97.4 | 10.1 | 14.2 | 6.75 | 60.5 |
表3 总体消融实验结果
Tab. 3 Overall ablation experiment results
| 实验 | SGC3 | R-Triplet | MRB | mAP/%↑ | 模型大小/MB↓ | 浮点运算量/GFLOPs↓ | 参数量/106↓ | 帧率/(frame·s-1)↑ |
|---|---|---|---|---|---|---|---|---|
| 实验1 | ― | ― | ― | 93.6 | 13.7 | 16.0 | 7.03 | 51.2 |
| 实验2 | √ | ― | ― | 94.8 | 11.6 | 12.6 | 5.89 | 65.3 |
| 实验3 | ― | √ | ― | 94.2 | 13.8 | 16.0 | 7.10 | 50.8 |
| 实验4 | ― | ― | √ | 94.4 | 13.8 | 16.2 | 7.11 | 49.1 |
| 实验5 | √ | √ | ― | 96.3 | 12.0 | 12.6 | 5.89 | 63.0 |
| 实验6 | √ | √ | √ | 97.4 | 10.1 | 14.2 | 6.75 | 60.5 |
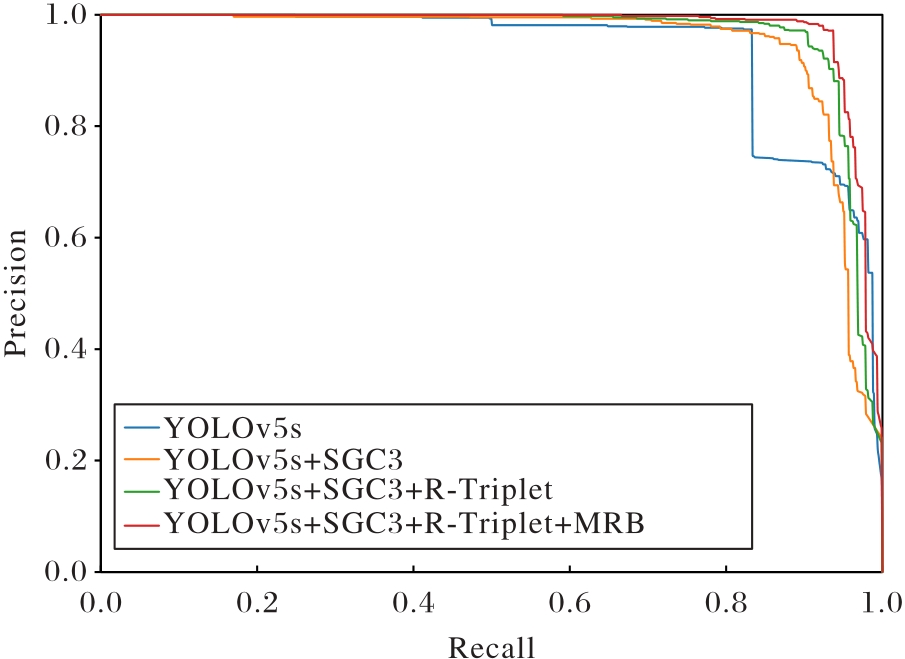
图10 消融实验中的P-R曲线
Fig. 10 P-R curves in ablation experiments
| 算法 | mAP/%↑ | 相较于YOLOv5s变化/百分点 |
|---|---|---|
| YOLOv5s | 93.6 | ― |
| YOLOv5s+ECA | 94.0 | 0.4 |
| YOLOv5s+Biformer | 93.7 | 0.1 |
| YOLOv5s+R-Triplet | 94.2 | 0.6 |
表4 R-Triplet模块的对比实验结果
Tab. 4 Comparison experiment results of R-Triplet module
| 算法 | mAP/%↑ | 相较于YOLOv5s变化/百分点 |
|---|---|---|
| YOLOv5s | 93.6 | ― |
| YOLOv5s+ECA | 94.0 | 0.4 |
| YOLOv5s+Biformer | 93.7 | 0.1 |
| YOLOv5s+R-Triplet | 94.2 | 0.6 |
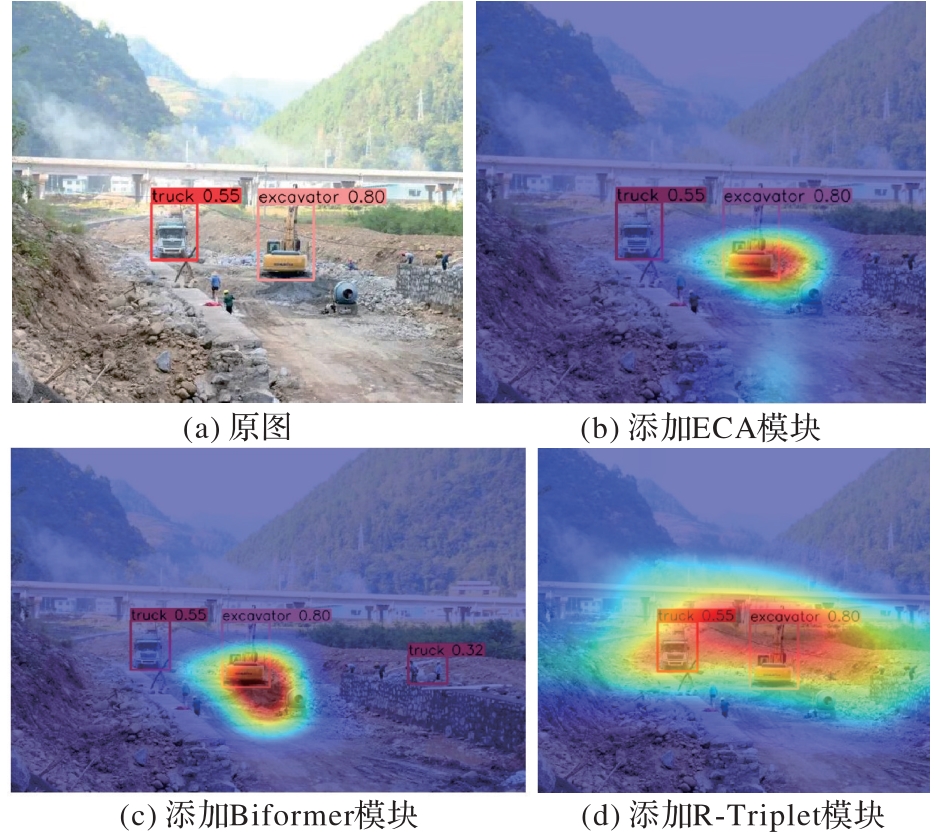
图11 热力图的可视化对比
Fig. 11 Heatmap visualization comparison
| 算法 | mAP/%↑ | 相较于YOLOv5s变化/百分点 |
|---|---|---|
| YOLOv5s | 93.6 | ― |
| YOLOv5s+ASPP[ | 94.9 | 1.3 |
| YOLOv5s+Scale-Aware RFE Model[ | 95.5 | 1.9 |
| YOLOv5s+MRB | 95.7 | 2.1 |
表5 MRB模块的对比实验结果
Tab. 5 Comparison experiment results of MRB module
| 算法 | mAP/%↑ | 相较于YOLOv5s变化/百分点 |
|---|---|---|
| YOLOv5s | 93.6 | ― |
| YOLOv5s+ASPP[ | 94.9 | 1.3 |
| YOLOv5s+Scale-Aware RFE Model[ | 95.5 | 1.9 |
| YOLOv5s+MRB | 95.7 | 2.1 |
| 算法 | mAP/%↑ | 参数量/106↓ | 浮点运算量/GFLOPs↓ | 模型大小/MB↓ |
|---|---|---|---|---|
| YOLOv3 | 92.8 | 61.54 | 155.3 | 117.8 |
| YOLOv3-tiny | 79.1 | 8.68 | 13.0 | 16.6 |
| YOLOv5s | 93.6 | 7.03 | 16.0 | 13.7 |
| YOLOv7 | 94.4 | 37.21 | 105.2 | 71.3 |
| YOLOX-s | 96.5 | 8.92 | 26.5 | 18.1 |
| YOLOv8s | 96.2 | 11.13 | 28.4 | 22.5 |
| CRM-YOLOv5s | 97.4 | 6.75 | 14.2 | 10.1 |
表6 主流检测算法的对比实验结果
Tab. 6 Comparison experiment results of mainstream detection algorithms
| 算法 | mAP/%↑ | 参数量/106↓ | 浮点运算量/GFLOPs↓ | 模型大小/MB↓ |
|---|---|---|---|---|
| YOLOv3 | 92.8 | 61.54 | 155.3 | 117.8 |
| YOLOv3-tiny | 79.1 | 8.68 | 13.0 | 16.6 |
| YOLOv5s | 93.6 | 7.03 | 16.0 | 13.7 |
| YOLOv7 | 94.4 | 37.21 | 105.2 | 71.3 |
| YOLOX-s | 96.5 | 8.92 | 26.5 | 18.1 |
| YOLOv8s | 96.2 | 11.13 | 28.4 | 22.5 |
| CRM-YOLOv5s | 97.4 | 6.75 | 14.2 | 10.1 |
| 算法 | mAP↑ | AP↑ | |||
|---|---|---|---|---|---|
| 卡车 | 挖掘机 | 吊车 | 装载机 | ||
| YOLOv5s | 93.6 | 95.7 | 97.9 | 98.6 | 82.2 |
| CRM-YOLOv5s | 97.4 | 97.2 | 95.4 | 97.5 | 95.5 |
表7 YOLOv5s改进前后的检测性能对比 ( %)
Tab. 7 Comparison of detection performance before and after improving YOLOv5s
| 算法 | mAP↑ | AP↑ | |||
|---|---|---|---|---|---|
| 卡车 | 挖掘机 | 吊车 | 装载机 | ||
| YOLOv5s | 93.6 | 95.7 | 97.9 | 98.6 | 82.2 |
| CRM-YOLOv5s | 97.4 | 97.2 | 95.4 | 97.5 | 95.5 |
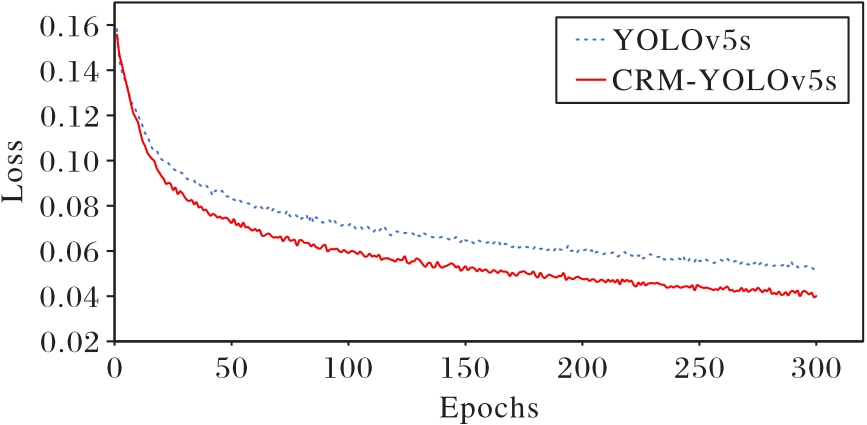
图12 YOLOv5s改进前后的Loss曲线
Fig. 12 Comparison of Loss curves YOLOv5s before and after improvement

图13 检测效果对比
Fig. 13 Comparison of detection performance
| 算法 | NSA | GSI | MOTA/% | IDF1/% | IDs |
|---|---|---|---|---|---|
| 算法1 | ― | ― | 84.1 | 86.4 | 32 |
| 算法2 | √ | ― | 85.7 | 86.6 | 30 |
| 算法3 | ― | √ | 85.9 | 87.1 | 27 |
| 算法4 | √ | √ | 86.9 | 87.6 | 22 |
表8 改进点的消融实验结果
Tab. 8 Ablation experiment results of improvement points
| 算法 | NSA | GSI | MOTA/% | IDF1/% | IDs |
|---|---|---|---|---|---|
| 算法1 | ― | ― | 84.1 | 86.4 | 32 |
| 算法2 | √ | ― | 85.7 | 86.6 | 30 |
| 算法3 | ― | √ | 85.9 | 87.1 | 27 |
| 算法4 | √ | √ | 86.9 | 87.6 | 22 |
| 算法 | MOTA/% | IDF1/% | IDs |
|---|---|---|---|
| YOLOv5s+ByteTrack | 84.1 | 86.4 | 32 |
| CRM-YOLOv5s+ByteTrack | 86.3 | 88.2 | 27 |
| YOLOv5s+NG-ByteTrack | 86.9 | 87.6 | 22 |
| CRM-YOLOv5s+NG-ByteTrack | 88.6 | 90.1 | 17 |
表9 检测跟踪算法的消融实验结果
Tab. 9 Ablation experiment results of detection and tracking algorithms
| 算法 | MOTA/% | IDF1/% | IDs |
|---|---|---|---|
| YOLOv5s+ByteTrack | 84.1 | 86.4 | 32 |
| CRM-YOLOv5s+ByteTrack | 86.3 | 88.2 | 27 |
| YOLOv5s+NG-ByteTrack | 86.9 | 87.6 | 22 |
| CRM-YOLOv5s+NG-ByteTrack | 88.6 | 90.1 | 17 |
| 算法 | MOTA/% | IDF1/% | IDs |
|---|---|---|---|
| DeepSORT[ | 72.4 | 84.7 | 42 |
| StrongSORT[ | 73.1 | 82.9 | 40 |
| BoTSORT[ | 75.5 | 79.8 | 52 |
| FairMOT[ | 81.3 | 85.2 | 76 |
| MOTDT[ | 70.8 | 81.5 | 38 |
| ByteTrack[ | 83.2 | 85.6 | 34 |
| 本文算法 | 88.6 | 90.1 | 17 |
表10 跟踪算法对比实验结果
Tab. 10 Comparison experiment results of tracking algorithms
| 算法 | MOTA/% | IDF1/% | IDs |
|---|---|---|---|
| DeepSORT[ | 72.4 | 84.7 | 42 |
| StrongSORT[ | 73.1 | 82.9 | 40 |
| BoTSORT[ | 75.5 | 79.8 | 52 |
| FairMOT[ | 81.3 | 85.2 | 76 |
| MOTDT[ | 70.8 | 81.5 | 38 |
| ByteTrack[ | 83.2 | 85.6 | 34 |
| 本文算法 | 88.6 | 90.1 | 17 |

图14 多目标跟踪效果的对比
Fig. 14 Comparison of multi-object tracking performance
图15 算法部署示意图
Fig. 15 Schematic diagram of algorithm deployment

图16 可视化结果对比
Fig. 16 Comparison of visualization results
| 算法 | mAP@0.5/% | mAP@0.5:0.95/% | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 92.0 | 60.2 | 28.4 |
| CRM-YOLOv5s | 96.9 | 63.4 | 35.9 |
表11 推理实验结果对比
Tab. 11 Comparison of reasoning experimental results
| 算法 | mAP@0.5/% | mAP@0.5:0.95/% | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 92.0 | 60.2 | 28.4 |
| CRM-YOLOv5s | 96.9 | 63.4 | 35.9 |
| [1] | WONG S Y, CHOE C W C, GOH H H, et al. Power transmission line fault detection and diagnosis based on artificial intelligence approach and its development in UAV: a review [J]. Arabian Journal for Science and Engineering, 2021, 46(10): 9305-9331. |
| [2] | 闫钧华,张琨,施天俊,等.融合多层级特征的遥感图像地面弱小目标检测[J].仪器仪表学报,2022, 43(3): 221-229. |
| YAN J H, ZHANG K, SHI T J, et al. Multi-level feature fusion based dim small ground target detection in remote sensing images [J]. Journal of Scientific Instrument, 2022, 43(3): 221-229. | |
| [3] | 郝帅,赵新生,马旭,等.基于TR-YOLOv5的输电线路多类缺陷目标检测方法[J].图学学报,2023, 44(4): 667-676. |
| HAO S, ZHAO X S, MA X, et al. Multi- class defect target detection method for transmission lines based on TR-YOLOv5s [J]. Journal of Graphics, 2023, 44(4): 667-676. | |
| [4] | 葛雯,姜添元.改进YOLO与Deepsort检测跟踪算法的研究[J].计算机仿真,2022, 39(5): 186-190. |
| GE W, JIANG T Y. Research on improved YOLO and Deepsort detection and tracking algorithm [J]. Computer Simulation, 2022, 39(5): 186-190. | |
| [5] | 黄战华,陈智林,张晗笑,等.基于音视频信息融合的目标检测与跟踪算法[J].应用光学,2021, 42(5): 867-876. |
| HUANG Z H, CHEN Z L, ZHANG H X, et al. Object detection and tracking algorithm based on audio-visual information fusion [J]. Journal of Applied Optics, 2021, 42(5): 867-876. | |
| [6] | 薛俊韬,马若寒,胡超芳,等.基于MobileNet的多目标跟踪深度学习算法[J].控制与决策,2021, 36(8): 1991-1996. |
| XUE J T, MA R H, HU C F, et al. Deep learning algorithm based on MobileNet for multi-target tracking [J]. Control and Decision, 2021, 36(8): 1991-1996. | |
| [7] | 涂淑琴,汤寅杰,李承桀,等.基于改进ByteTrack算法的群养生猪行为识别与跟踪技术[J].农业机械学报,2022, 53(12): 264-272. |
| TU S Q, TANG Y J, LI C J, et al. Behavior recognition and tracking technology of group-raised pigs based on improved ByteTrack algorithm [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(12): 264-272. | |
| [8] | 张彩煜,李明磊,魏大洲,等.基于改进FairMOT算法的热红外影像目标跟踪[J].计算机仿真,2023, 40(12): 304-308. |
| ZHANG C Y, LI M L, WEI D Z, et al. Object tracking in thermal infrared images based on improved FairMOT algorithm [J]. Computer Simulation, 2023, 40(12): 304-308. | |
| [9] | HAN K, WANG Y, TIAN Q, et al. GhostNet: more features from cheap operations [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1577-1586. |
| [10] | YANG L, ZHANG R Y, LI L, et al. SimAM: a simple, parameter-free attention module for convolutional neural networks [C]// Proceedings of the 38th International Conference on Machine Learning. New York: JMLR.org, 2021: 11863-11874. |
| [11] | SELVARAJU R, COGSWELL M, DAS A, et al. Grad-CAM: visual explanations from deep networks via gradient-based localization [J]. International Journal of Computer Vision, 2020, 128(2): 336-359. |
| [12] | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| [13] | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. |
| [14] | 谌海云,黄忠义,王海川,等.基于改进Tracktor的行人多目标跟踪算法[J].计算机工程与应用,2024, 60(8): 242-249. |
| SHEN H Y, HUANG Z Y, WANG H C, et al. Improved Tracktor-based pedestrian multi-objective tracking algorithm [J]. Computer Engineering and Applications, 2024, 60(8): 242-249. | |
| [15] | WANG Q, WU B, ZHU P, et al. ECA-Net: efficient channel attention for deep convolutional neural networks [C]// Proceedings of the 2020 IEEE/CVF Computer Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11531-11539. |
| [16] | ZHU L, WANG X, KE Z, et al. BiFormer: Vision Transformer with bi-level routing attention [C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 10323-10333. |
| [17] | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(4): 834-848. |
| [18] | YU Z, HUANG H, CHEN W, et al. YOLO-FaceV2: a scale and occlusion aware face detector [J]. Pattern Recognition, 2024, 155: No.110714. |
| [19] | WOJKE N, BEWLEY A, PAULUS D. Simple online and realtime tracking with a deep association metric [C]// Proceedings of the 2017 IEEE International Conference on Image Processing. Piscataway: IEEE, 2017: 3645-3649. |
| [20] | DU Y, ZHAO Z, SONG Y, et al. StrongSORT: make DeepSORT great again [J]. IEEE Transactions on Multimedia, 2023, 25: 8725-8737. |
| [21] | AHARON N, ORFAIG R, BOBROVSKY B Z. BoT-SORT: robust associations multi-pedestrian tracking [EB/OL]. [2023-09-01]. . |
| [22] | ZHANG Y, WANG C, WANG X, et al. FairMOT: on the fairness of detection and re-identification in multiple object tracking [J]. International Journal of Computer Vision, 2021, 129(11): 3069-3087. |
| [23] | CHEN L, AI H, ZHUANG Z, et al. Real-time multiple people tracking with deeply learned candidate selection and person re-identification [C]// Proceedings of the 2018 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2018: 1-6. |
| [24] | ZHANG Y, SUN P, JANG Y, et al. ByteTrack: multi-object tracking by associating every detection box [C]// Proceedings of the 2022 European Conference on Computer Vision, LNCS 13682. Cham: Springer, 2022: 1-21. |
| [1] | 颜承志, 陈颖, 钟凯, 高寒. 基于多尺度网络与轴向注意力的3D目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2537-2545. |
| [2] | 廖炎华, 鄢元霞, 潘文林. 基于YOLOv9的交通路口图像的多目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2555-2565. |
| [3] | 谢斌红, 剌颖坤, 张英俊, 张睿. 自步学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2546-2554. |
| [4] | 张子墨, 赵雪专. 多尺度稀疏图引导的视觉图神经网络[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2188-2194. |
| [5] | 范博淦, 王淑青, 陈开元. 基于改进YOLOv8的航拍无人机小目标检测模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2342-2350. |
| [6] | 张英俊, 闫薇薇, 谢斌红, 张睿, 陆望东. 梯度区分与特征范数驱动的开放世界目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2203-2210. |
| [7] | 蒋沛宇, 王永光, 任亚亭, 李硕晨, 谭火彬. 基于测量不确定度表示指南的红外目标检测不确定度测量方案[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2162-2168. |
| [8] | 陈亮, 王璇, 雷坤. 复杂场景下跨层多尺度特征融合的安全帽佩戴检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2333-2341. |
| [9] | 张李伟, 梁泉, 胡禹涛, 朱乔乐. 基于分组卷积的通道重洗注意力机制[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1069-1076. |
| [10] | 侯阳, 张琼, 赵紫煊, 朱正宇, 张晓博. 基于YOLOv5s的复杂场景下高效烟火检测算法YOLOv5s-MRD[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1317-1324. |
| [11] | 赵轻轻, 胡滨. 不变性全局稀疏轮廓点表征的运动行人检测神经网络[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1271-1284. |
| [12] | 张传浩, 屠晓涵, 谷学汇, 轩波. 基于多模态信息相互引导补充的雷达-相机三维目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 946-952. |
| [13] | 余松森, 林智凡, 薛国鹏, 徐建宇. 基于改进YOLOv8的轻量级大幅面瓷砖缺陷检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 647-654. |
| [14] | 何秋润, 胡节, 彭博, 李天源. 基于上下文信息的多尺度特征融合织物疵点检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 640-646. |
| [15] | 洪梓榕, 包广清. 基于集成学习的雷达自动目标识别综述[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 371-382. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||