


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (2): 536-545.DOI: 10.11772/j.issn.1001-9081.2024121782
• 多媒体计算与计算机仿真 • 上一篇
喇孝伟1, 胡立华1( ), 胡建华2, 姚晓玲1, 王欣波2
), 胡建华2, 姚晓玲1, 王欣波2
收稿日期:2024-12-18
修回日期:2025-05-14
接受日期:2025-05-15
发布日期:2025-06-05
出版日期:2026-02-10
通讯作者:
胡立华
作者简介:喇孝伟(2000—),男,河北张家口人,硕士研究生,主要研究方向:计算机视觉、点云配准基金资助:
Xiaowei LA1, Lihua HU1(), Jianhua HU2, Xiaoling YAO1, Xinbo WANG2
Received:2024-12-18
Revised:2025-05-14
Accepted:2025-05-15
Online:2025-06-05
Published:2026-02-10
Contact:
Lihua HU
About author:LA Xiaowei, born in 2000, M. S. candidate. His research interests include computer vision, point cloud registration.Supported by:摘要:
针对低重叠场景下点云配准方法存在的关键点特征描述信息不足和重叠点云区域较少,进而导致点云的误匹配率高以及配准精度低的问题,设计一种融合位置编码和重叠掩模的低重叠点云配准网络,以降低点云的误匹配率,并提高配准的精度。首先,采用PointNet逐点特征编码器提取点云关键点,并融合关键点的特征信息、坐标信息和位置编码,生成更具判别力的关键点特征;其次,将融合后的特征输入自注意力和交叉注意力模块,以增强点云特征的描述能力,加强点云的上下文信息交互,从而解决关键点描述信息不足的问题;再次,在注意力模块之后引入重叠掩模模块,通过学习重叠掩模去除非重叠区域的关键点,以降低误匹配率;最后,结合Sinkhorn算法进行最优匹配,并采用迭代最近邻点(ICP)算法进行细化,提高点云配准精度。在CODD数据集和KITTI数据集上与多种现有的低重叠点云配准方法进行对比的实验结果表明,经过ICP细化后的网络性能更优,特别是在CODD数据集上,它比当前先进的低重叠点云配准方法CoFiI2P (Coarse-to-Fine correspondences for Image-to-Point cloud registration)的相对平移误差(RTE)和相对旋转误差(RRE)分别降低了53.29%和42.72%,配准召回率(RR)提升了0.2个百分点。可见,该网络能充分提取关键点特征的描述信息,并有效提升低重叠场景下的点云配准精度。
中图分类号:
喇孝伟, 胡立华, 胡建华, 姚晓玲, 王欣波. 融合位置编码和重叠掩模的低重叠点云配准网络[J]. 计算机应用, 2026, 46(2): 536-545.
Xiaowei LA, Lihua HU, Jianhua HU, Xiaoling YAO, Xinbo WANG. Low-overlap point cloud registration network integrating position encoding and overlap masks[J]. Journal of Computer Applications, 2026, 46(2): 536-545.

图1 基线网络的结构
Fig. 1 Structure of baseline network
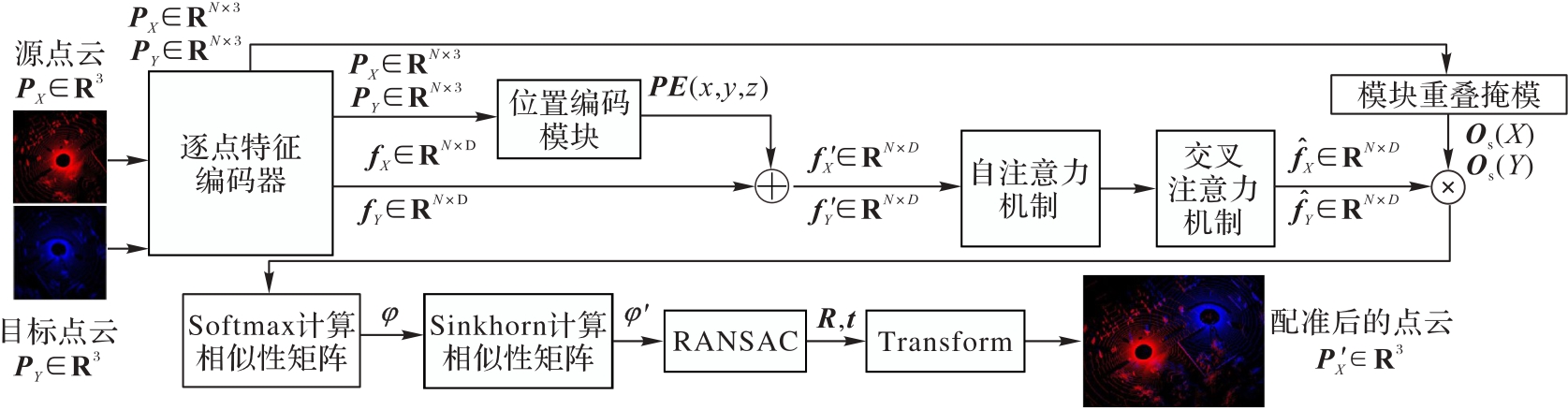
图2 低重叠点云配准网络的框架
Fig. 2 Framework for low-overlap point cloud registration network
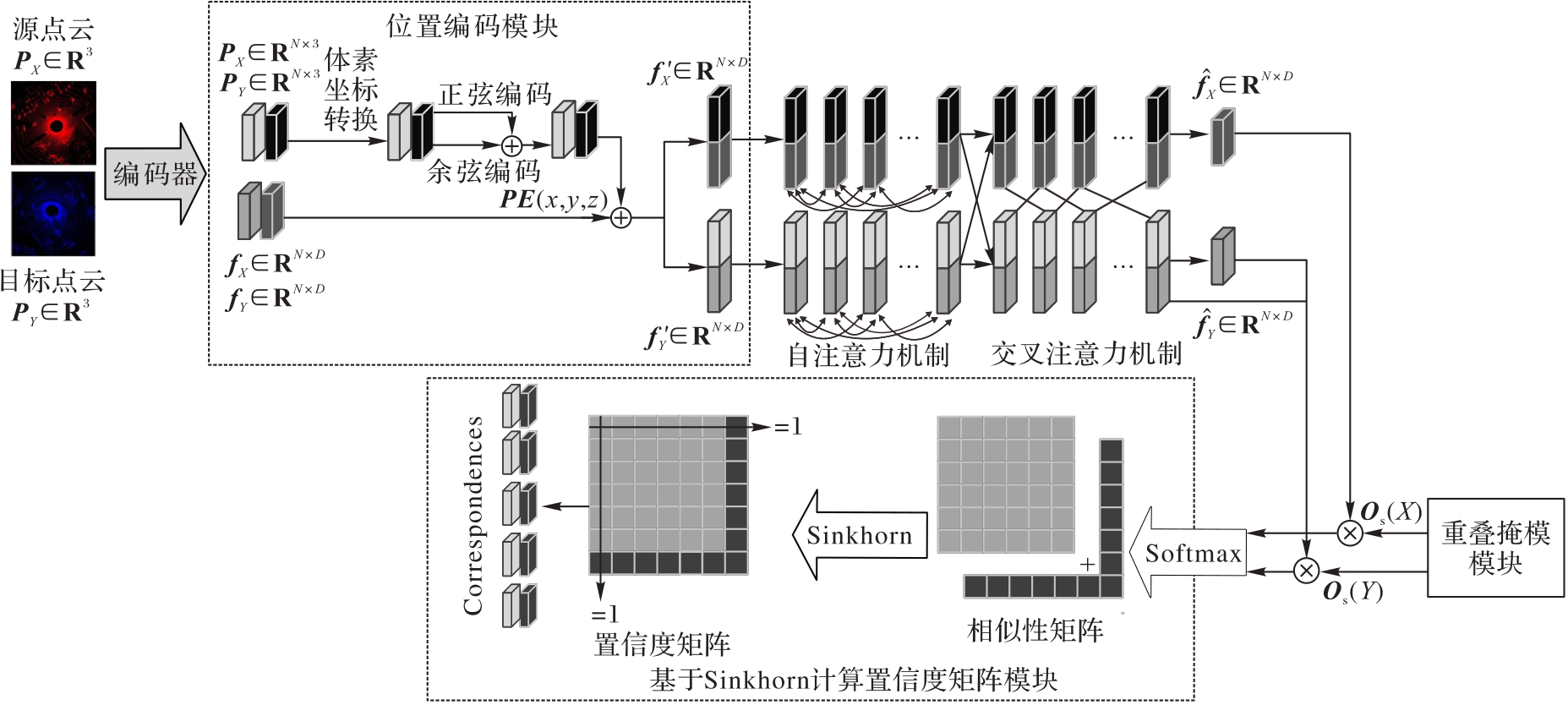
图3 点云配准网络核心模块的结构
Fig. 3 Structure of core module of point cloud registration network
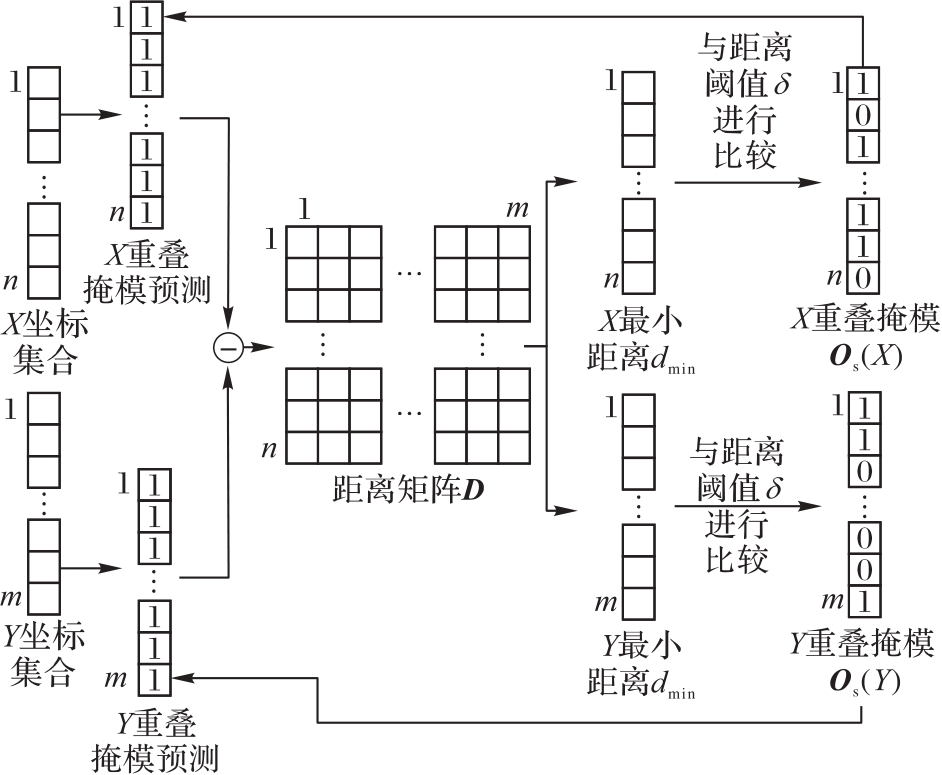
图4 重叠掩模模块的结构
Fig. 4 Structure of overlap mask module
| 数据集 | 子集 | 序列数 | 样本数 |
|---|---|---|---|
| KITTI | 训练集 | 5 | 1 358 |
| 验证集 | 2 | 180 | |
| 测试集 | 2 | 255 | |
| CODD | 训练集 | 78 | 6 129 |
| 验证集 | 14 | 1 339 | |
| 测试集 | 15 | 1 315 |
表1 KITTI和CODD数据集信息
Tab. 1 Information of KITTI and CODD datasets
| 数据集 | 子集 | 序列数 | 样本数 |
|---|---|---|---|
| KITTI | 训练集 | 5 | 1 358 |
| 验证集 | 2 | 180 | |
| 测试集 | 2 | 255 | |
| CODD | 训练集 | 78 | 6 129 |
| 验证集 | 14 | 1 339 | |
| 测试集 | 15 | 1 315 |
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.2 | 97.3 | 94.5 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 0.5 | 96.4 | 93.4 |
表2 距离阈值对KITTI和CODD数据集上配准召回率的影响
Tab. 2 Impact of distance threshold on registration recall on KITTI and CODD datasets
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.2 | 97.3 | 94.5 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 0.5 | 96.4 | 93.4 |
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.1 | 96.6 | 94.0 |
| 0.2 | 97.4 | 94.7 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
表3 体素对KITTI和CODD数据集上配准召回率的影响
Tab. 3 Impact of voxel on registration recall on KITTI and CODD datasets
| 配准召回率/% | ||
|---|---|---|
| KITTI | CODD | |
| 0.1 | 96.6 | 94.0 |
| 0.2 | 97.4 | 94.7 |
| 0.3 | 98.3 | 95.0 |
| 0.4 | 97.0 | 94.1 |
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 6.124 | 5.890 | 8.6 |
| Symmetric ICP | 5.340 | 5.260 | 12.4 |
| FPFH | 0.265 | 0.890 | 97.8 |
| TEASER | 0.190 | 0.750 | 98.6 |
| FCGF | 0.237 | 0.300 | 97.5 |
| DGR | 0.156 | 0.370 | 98.2 |
| 3DFeatNet | 0.259 | 0.250 | 96.0 |
| SpinNet | 0.099 | 0.470 | 99.1 |
| Predator | 0.068 | 0.270 | 99.8 |
| CoFiNet | 0.082 | 0.410 | 99.8 |
| HRegNet | 0.120 | 0.290 | 99.7 |
| RegFormer | 0.086 | 0.232 | 99.8 |
| CoFiI2P | 0.073 | 0.260 | 99.7 |
| 基线网络 | 0.261 | 0.738 | 97.0 |
| 基线网络+ICP | 0.092 | 0.254 | 98.5 |
| 本文网络 | 0.233 | 0.614 | 98.3 |
| 本文网络+ICP | 0.066 | 0.178 | 99.2 |
表4 KITTI数据集上的实验结果
Tab. 4 Experimental results on KITTI dataset
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 6.124 | 5.890 | 8.6 |
| Symmetric ICP | 5.340 | 5.260 | 12.4 |
| FPFH | 0.265 | 0.890 | 97.8 |
| TEASER | 0.190 | 0.750 | 98.6 |
| FCGF | 0.237 | 0.300 | 97.5 |
| DGR | 0.156 | 0.370 | 98.2 |
| 3DFeatNet | 0.259 | 0.250 | 96.0 |
| SpinNet | 0.099 | 0.470 | 99.1 |
| Predator | 0.068 | 0.270 | 99.8 |
| CoFiNet | 0.082 | 0.410 | 99.8 |
| HRegNet | 0.120 | 0.290 | 99.7 |
| RegFormer | 0.086 | 0.232 | 99.8 |
| CoFiI2P | 0.073 | 0.260 | 99.7 |
| 基线网络 | 0.261 | 0.738 | 97.0 |
| 基线网络+ICP | 0.092 | 0.254 | 98.5 |
| 本文网络 | 0.233 | 0.614 | 98.3 |
| 本文网络+ICP | 0.066 | 0.178 | 99.2 |
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 16.136 | 74.842 | 7.5 |
| Symmetric ICP | 15.106 | 73.551 | 12.8 |
| FPFH | 13.802 | 69.593 | 31.3 |
| TEASER | 12.908 | 69.208 | 38.0 |
| FCGF | 1.700 | 0.180 | 91.0 |
| DGR | 0.390 | 1.520 | 94.0 |
| RegFormer | 0.135 | 0.189 | 97.4 |
| CoFiI2P | 0.167 | 0.213 | 97.6 |
| 基线网络 | 0.313 | 0.415 | 92.7 |
| 基线网络+ICP | 0.120 | 0.130 | 97.0 |
| 本文网络 | 0.261 | 0.357 | 95.0 |
| 本文网络+ICP | 0.078 | 0.122 | 97.8 |
表5 CODD数据集上的实验结果
Tab. 5 Experimental results on CODD dataset
| 模型 | RTE/m (↓) | RRE/(°)(↓) | RR/%(↑) |
|---|---|---|---|
| ICP | 16.136 | 74.842 | 7.5 |
| Symmetric ICP | 15.106 | 73.551 | 12.8 |
| FPFH | 13.802 | 69.593 | 31.3 |
| TEASER | 12.908 | 69.208 | 38.0 |
| FCGF | 1.700 | 0.180 | 91.0 |
| DGR | 0.390 | 1.520 | 94.0 |
| RegFormer | 0.135 | 0.189 | 97.4 |
| CoFiI2P | 0.167 | 0.213 | 97.6 |
| 基线网络 | 0.313 | 0.415 | 92.7 |
| 基线网络+ICP | 0.120 | 0.130 | 97.0 |
| 本文网络 | 0.261 | 0.357 | 95.0 |
| 本文网络+ICP | 0.078 | 0.122 | 97.8 |
| 模型 | KITTI | CODD | ||||
|---|---|---|---|---|---|---|
| RTE/m (↓) | RRE/(°) | RR/% | RTE/m | RRE/(°) | RR/% | |
| 基线模型 | 0.261 | 0.738 | 97.0 | 0.313 | 0.415 | 91.7 |
| 基线模型+位置编码 | 0.239 | 0.645 | 97.5 | 0.290 | 0.356 | 94.7 |
| 基线模型+重叠掩模 | 0.245 | 0.656 | 97.4 | 0.283 | 0.371 | 94.5 |
| 基线模型+位置编码+重叠掩模 | 0.235 | 0.630 | 97.7 | 0.290 | 0.382 | 95.0 |
| 基线模型+位置编码+重叠掩模+Sinkhorn | 0.233 | 0.614 | 98.3 | 0.261 | 0.357 | 95.0 |
表6 KITTI和CODD数据集上的消融实验结果
Tab. 6 Ablation experimental results on KITTI and CODD datasets
| 模型 | KITTI | CODD | ||||
|---|---|---|---|---|---|---|
| RTE/m (↓) | RRE/(°) | RR/% | RTE/m | RRE/(°) | RR/% | |
| 基线模型 | 0.261 | 0.738 | 97.0 | 0.313 | 0.415 | 91.7 |
| 基线模型+位置编码 | 0.239 | 0.645 | 97.5 | 0.290 | 0.356 | 94.7 |
| 基线模型+重叠掩模 | 0.245 | 0.656 | 97.4 | 0.283 | 0.371 | 94.5 |
| 基线模型+位置编码+重叠掩模 | 0.235 | 0.630 | 97.7 | 0.290 | 0.382 | 95.0 |
| 基线模型+位置编码+重叠掩模+Sinkhorn | 0.233 | 0.614 | 98.3 | 0.261 | 0.357 | 95.0 |
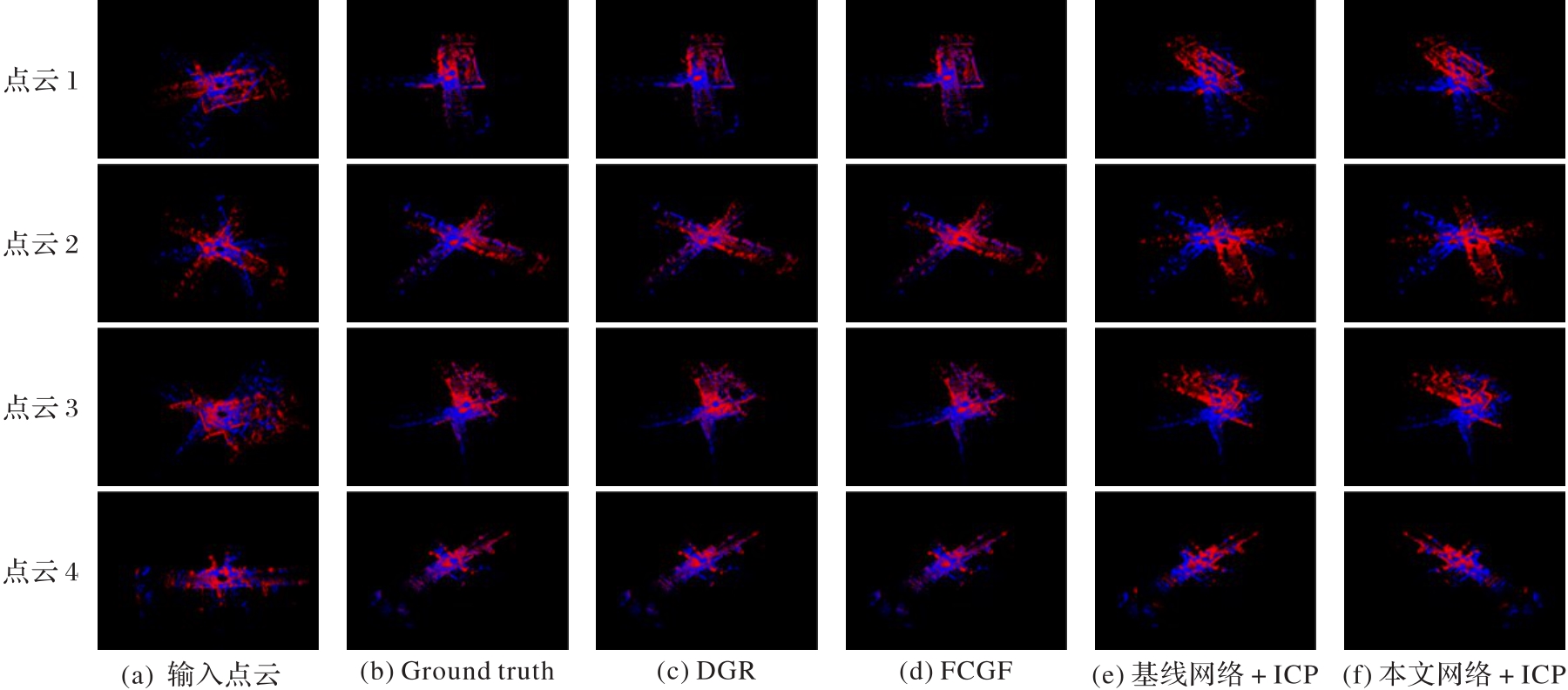
图5 KITTI数据集上的可视化结果
Fig. 5 Visualization results on KITTI dataset
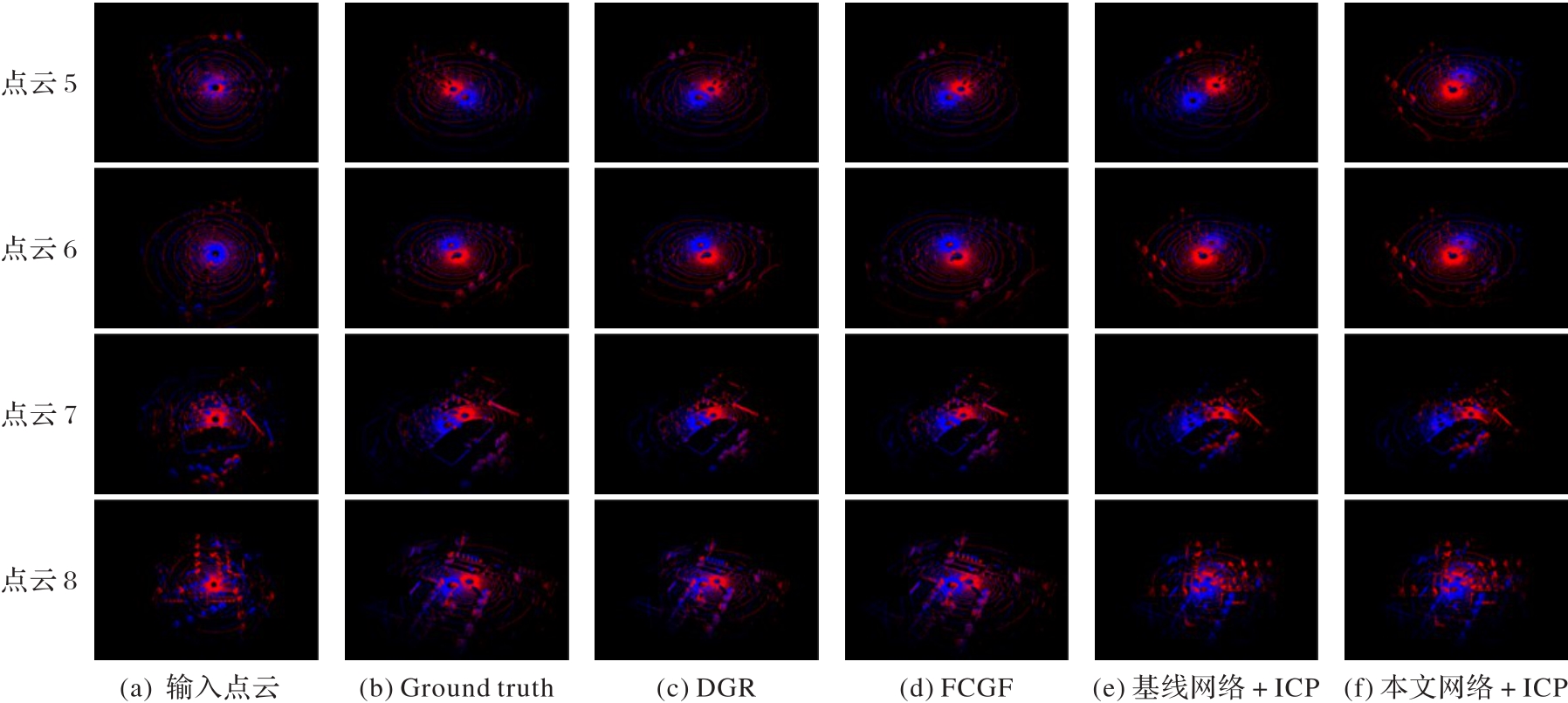
图6 CODD数据集上的可视化结果
Fig. 6 Visualization results on CODD dataset
| [1] | AZUMA R T. A survey of augmented reality [J]. Presence: Teleoperators and Virtual Environments, 1997, 6(4): 355-385. |
| [2] | CARMIGNIANI J, FURHT B, ANISETTI M, et al. Augmented reality technologies, systems and applications [J]. Multimedia Tools and Applications, 2011, 51(1): 341-377. |
| [3] | 徐帅.基于点云配准的单目视觉多人增强现实机制的研究[D].北京:北京邮电大学, 2020: 22-45. |
| XU S. Research on monocular vision multi-user augmented reality based on point cloud registration [D]. Beijing: Beijing University of Posts and Telecommunications, 2020: 22-45. | |
| [4] | IZADI S, KIM D, HILLIGES O, et al. KinectFusion: real-time 3D reconstruction and interaction using a moving depth camera [C]// Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology. New York: ACM, 2011: 559-568. |
| [5] | NIEβNER M, ZOLLHÖFER M, IZADI S, et al. Real-time 3D reconstruction at scale using voxel hashing [J]. ACM Transactions on Graphics, 2013, 32(6): No.169. |
| [6] | 刘建斌,马燕,黄慧.基于快速聚合和预配准的三维人脸重建[J].计算机与数字工程, 2024, 52(5): 1477-1481. |
| LIU J B, MA Y, HUANG H. 3D face reconstruction based on fast aggregation and pre-registration [J]. Computer and Digital Engineering, 2024, 52(5): 1477-1481. | |
| [7] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| [8] | YURTSEVER E, LAMBERT J, CARBALLO A, et al. A survey of autonomous driving: common practices and emerging technologies [J]. IEEE Access, 2020, 8: 58443-58469. |
| [9] | 柳斌.面向自动驾驶的MEMS激光雷达目标点云配准方法研究[D].吉林:吉林化工学院, 2024: 18-31. |
| LIU B. Research on MEMS LiDAR target point cloud registration method for autonomous driving [D]. Jilin: Jilin Institute of Chemical Technology, 2024: 18-31. | |
| [10] | BESL P J, McKAY N D. Method for registration of 3-D shapes [C]// Proceedings of the SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures. Bellingham, WA: SPIE, 1992: 586-606. |
| [11] | RUSU R B, BLODOW N, BEETZ M. Fast Point Feature Histograms (FPFH) for 3D registration [C]// Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2009: 3212-3217. |
| [12] | YANG J, LI H, JIA Y. Go-ICP: solving 3D registration efficiently and globally optimally [C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 1457-1464. |
| [13] | RUSINKIEWICZ S. A symmetric objective function for ICP [J]. ACM Transactions on Graphics, 2019, 38(4): No.85. |
| [14] | LIU H, ZHANG Y, LEI L, et al. Hierarchical optimization of 3D point cloud registration [J]. Sensors, 2020, 20(23): No.6999. |
| [15] | YANG H, SHI J, CARLONE L. TEASER: fast and certifiable point cloud registration [J]. IEEE Transactions on Robotics, 2021, 37(2): 314-333. |
| [16] | 朱乾荣,柏艳红,王银,等.基于3D形状上下文特征改进的ICP点云配准算法[J].海洋测绘, 2023, 43(2): 69-73. |
| ZHU Q R, BAI Y H, WANG Y, et al. Improved ICP point cloud registration algorithm based on 3D shape context features [J]. Hydrographic Surveying and Charting, 2023, 43(2): 69-73. | |
| [17] | 唐佳林,林寿南,周壮,等.基于特征变换结合KD树改进ICP的快速点云配准方法[J].计算机科学, 2023, 50(11A): No.230100028. |
| TANG J L, LIN S N, ZHOU Z, et al. Improved ICP fast point cloud registration method based on feature transformation combined with KD tree [J]. Computer Science, 2023, 50(11A): No.230100028. | |
| [18] | AOKI Y, GOFORTH H, SRIVATSAN R A, et al. PointNetLK: robust and efficient point cloud registration using PointNet [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7156-7165. |
| [19] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [20] | LUCAS B D, KANADE T. An iterative image registration technique with an application to stereo vision [C]// Proceedings of the 7th International Joint Conference on Artificial Intelligence — Volume 2. San Francisco: Morgan Kaufmann Publishers Inc., 1981: 674-679. |
| [21] | SARODE V, LI X, GOFORTH H, et al. PCRNet: point cloud registration network using PointNet encoding [EB/OL]. [2024-08-07]. . |
| [22] | WANG Y, SOLOMON J M. Deep closest point: learning representations for point cloud registration [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 3522-3531. |
| [23] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds [J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [24] | ARUN K S, HUANG T S, BLOSTEIN S D. Least-squares fitting of two 3-D point sets [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, PAMI-9(5): 698-700. |
| [25] | WANG Y, SOLOMON J. PRNet: self-supervised learning for partial-to-partial registration [C]// Proceedings of the 33rd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2019: 8814-8826. |
| [26] | YEW Z J, LEE G H. RPM-Net: robust point matching using learned features [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11821-11830. |
| [27] | SINKHORN R. A relationship between arbitrary positive matrices and doubly stochastic matrices [J]. The Annals of Mathematical Statistics, 1964, 35(2): 876-879. |
| [28] | YUAN Y, BORRMANN D, HOU J, et al. Self-supervised point set local descriptors for point cloud registration [J]. Sensors, 2021, 21(2): No.486. |
| [29] | YEW Z J, LEE G H. 3DFeat-Net: weakly supervised local 3D features for point cloud registration [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11219. Cham: Springer, 2018: 630-646. |
| [30] | AO S, HU Q, YANG B, et al. SpinNet: learning a general surface descriptor for 3D point cloud registration [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11748-11757. |
| [31] | YI R, LI J, LUO L, et al. DOPNet: achieving accurate and efficient point cloud registration based on deep learning and multi-level features [J]. Sensors, 2022, 22(21): No.8217. |
| [32] | KANG S, LIAO Y, LI J, et al. CoFiI2P: coarse-to-fine correspondences for image-to-point cloud registration [J]. IEEE Robotics and Automation Letters, 2024, 9(11): 10264-10271. |
| [33] | LU F, CHEN G, LIU Y, et al. HRegNet: a hierarchical network for efficient and accurate outdoor LiDAR point cloud registration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(10): 11884-11897. |
| [34] | 徐嘉伯.用于低重叠点云配准任务的强泛化全卷积神经网络[D].南昌:南昌大学, 2023: 9-29. |
| XU J B. Strong generalization fully convolutional neural network for low-overlap point cloud registration [D]. Nanchang: Nanchang University, 2023: 9-29. | |
| [35] | LIU J, WANG G, LIU Z, et al. RegFormer: an efficient projection-aware Transformer network for large-scale point cloud registration [C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 8417-8426. |
| [36] | DENG H, BIRDAL T, ILIC S. PPFNet: global context aware local features for robust 3D point matching [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 195-205. |
| [37] | FISCHER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography [J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [38] | CHOY C, PARK J, KOLTUN V. Fully convolutional geometric features [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 8957-8965. |
| [39] | CHOY C, DONG W, KOLTUN V. Deep global registration [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 2511-2520. |
| [40] | HUANG S, GOJCIC Z, USVYATSOV M, et al. PREDATOR: registration of 3D point clouds with low overlap [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 4265-4274. |
| [41] | YU H, LI F, SALEH M, et al. CoFiNet: reliable coarse-to-fine correspondences for robust point cloud registration [C]// Proceedings of the 35th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 23872-23884. |
| [42] | ARNOLD E, MOZAFFARI S, DIANATI M. Fast and robust registration of partially overlapping point clouds [J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1502-1509. |
| [43] | QIN Z, YU H, WANG C, et al. Geometric Transformer for fast and robust point cloud registration [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 11133-11142. |
| [44] | 刘旭珩,柏正尧,许祝,等.结合注意力机制的多重引导点云配准网络[J].计算机科学, 2024, 51(2): 142-150. |
| LIU X H, BAI Z Y, XU Z, et al. Multi-guided point cloud registration network combined with attention mechanism [J]. Computer Science, 2024, 51(2): 142-150. | |
| [45] | 杜佳锦,柏正尧,刘旭珩,等.融合几何注意力和多尺度特征点云配准网络[J].计算机工程与应用, 2024, 60(12): 234-244. |
| DU J J, BAI Z Y, LIU X H, et al. Fusion of geometric attention and multi-scale feature network for point cloud registration [J]. Computer Engineering and Applications, 2024, 60(12): 234-244. |
| [1] | 罗虎, 张明书. 基于跨模态注意力机制与对比学习的谣言检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 361-367. |
| [2] | 李亚男, 郭梦阳, 邓国军, 陈允峰, 任建吉, 原永亮. 基于多模态融合特征的并分支发动机寿命预测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 305-313. |
| [3] | 何凡, 李理, 苑中旭, 杨秀, 韩东轩. 融合图注意力的概念关联记忆网络知识追踪模型[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 43-51. |
| [4] | 邓伊琳, 余发江. 基于LSTM和可分离自注意力机制的伪随机数生成器[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2893-2901. |
| [5] | 王翔, 陈志祥, 毛国君. 融合局部和全局相关性的多变量时间序列预测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2806-2816. |
| [6] | 梁一鸣, 范菁, 柴汶泽. 基于双向交叉注意力的多尺度特征融合情感分类[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2773-2782. |
| [7] | 赵小强, 柳勇勇, 惠永永, 刘凯. 基于改进时域卷积网络与多头自注意力机制的间歇过程质量预测模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2245-2252. |
| [8] | 梁辰, 王奕森, 魏强, 杜江. 基于Transformer-GCN的源代码漏洞检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2296-2303. |
| [9] | 王艺涵, 路翀, 陈忠源. 跨模态文本信息增强的多模态情感分析模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2237-2244. |
| [10] | 余明峰, 秦永彬, 黄瑞章, 陈艳平, 林川. 基于对比学习增强双注意力机制的多标签文本分类方法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1732-1740. |
| [11] | 李慧, 贾炳志, 王晨曦, 董子宇, 李纪龙, 仲兆满, 陈艳艳. 基于Swin Transformer的生成对抗网络水下图像增强模型[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1439-1446. |
| [12] | 姜坤元, 李小霞, 王利, 曹耀丹, 张晓强, 丁楠, 周颖玥. 引入解耦残差自注意力的边界交叉监督语义分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1120-1129. |
| [13] | 王雅伦, 张仰森, 朱思文. 面向知识推理的位置编码标题生成模型[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 345-353. |
| [14] | 王虎, 王晓峰, 李可, 马云洁. 融合多头自注意力的标签语义嵌入联邦类增量学习方法[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3083-3090. |
| [15] | 李维刚, 曹文杰, 李金灵. 基于自适应邻域特征融合的多阶段点云补全网络[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3294-3301. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||