


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (1): 331-340.DOI: 10.11772/j.issn.1001-9081.2025010085
• 前沿与综合应用 • 上一篇
李世伟1, 周昱峰1, 孙鹏飞1, 刘伟松2, 孟竹喧2, 廉浩杰1( )
)
收稿日期:2025-01-22
修回日期:2025-03-21
接受日期:2025-03-27
发布日期:2026-01-10
出版日期:2026-01-10
通讯作者:
廉浩杰
作者简介:李世伟(1999—),男,山西晋城人,硕士研究生,主要研究方向:深度学习基金资助:
Shiwei LI1, Yufeng ZHOU1, Pengfei SUN1, Weisong LIU2, Zhuxuan MENG2, Haojie LIAN1()
Received:2025-01-22
Revised:2025-03-21
Accepted:2025-03-27
Online:2026-01-10
Published:2026-01-10
Contact:
Haojie LIAN
About author:LI Shiwei, born in 1999, M. S. candidate. His research interests include deep learning.Supported by:摘要:
当前的三维目标检测模型大都基于数据驱动的深度学习技术,因此数据集的质量对模型的性能至关重要。针对煤尘环境数据集缺失和建立真实煤尘环境数据集费时费力的问题,提出一种基于煤尘对激光雷达(LiDAR)电磁波散射和吸收效应的点云数据增强方法。该方法针对煤尘粒子的光学特性,构建LiDAR电磁波在煤尘中的传播仿真模型,从而模拟LiDAR信号在煤尘环境中的衰减与散射;然后,在晴朗环境下采集的真实点云数据基础上,基于仿真模型对点云的三维坐标和反射强度进行修正,从而生成符合煤尘环境感知特性的仿真点云数据;最后,在增强后的仿真数据集上训练并测试5种主流三维目标检测模型(PV-RCNN++、PV-RCNN、PointRCNN、PointPillars和Voxel_RCNN_Car)。结果表明,所提方法让这5种检测模型在煤尘环境下的检测精度均有所提升,其中模型复杂度最高的PV-RCNN模型在汽车、行人和骑行者类别上的中等难度表现分别提高了1.88、1.74和0.84个百分点。可见,在煤尘环境中,相较于在晴朗条件下训练的模型,使用增强后的点云数据训练的目标检测模型的检测精度有显著提升,能更可靠地感知露天矿复杂环境,为无人驾驶矿车的稳定运行提供了数据支撑。
中图分类号:
李世伟, 周昱峰, 孙鹏飞, 刘伟松, 孟竹喧, 廉浩杰. 基于煤尘对激光雷达电磁波散射和吸收效应的点云数据增强方法[J]. 计算机应用, 2026, 46(1): 331-340.
Shiwei LI, Yufeng ZHOU, Pengfei SUN, Weisong LIU, Zhuxuan MENG, Haojie LIAN. Point cloud data augmentation method based on scattering and absorption effects of coal dust on LiDAR electromagnetic waves[J]. Journal of Computer Applications, 2026, 46(1): 331-340.
图1 散射粒子对脉冲的散射效果
Fig. 1 Scattering effect of scattered particles on pulses
图2 雪仿真算法示例[14]
Fig. 2 Example of snow simulation algorithm[14]
图3 露天矿基本环境
Fig. 3 Basic environments of open-pit mines
图4 煤尘光学特性分析实验示意图[21]
Fig. 4 Schematic diagram of coal dust optical characteristics analysis experiment[21]
| 粒径大小/μm | 权重 | ||
|---|---|---|---|
| (0,20] | 0.006 1 | 9.5 | 0.689 |
| (20,45] | 0.044 5 | 10.7 | 0.279 |
| (45,60] | 0.000 0 | 19.2 | 0.022 |
| (60,90] | -0.008 8 | 25.2 | 0.009 |
| (90,125] | -0.000 2 | 34.3 | 0.001 |
| (125,150] | 0.024 6 | 36.8 | 0.000 |
| (150,180] | 0.030 3 | 44.4 | 0.000 |
| (212,250] | 0.023 7 | 216.6 | 0.000 |
表1 消光系数及权重计算值[21]
Tab. 1 Calculation for extinction coefficients[21] and weights
| 粒径大小/μm | 权重 | ||
|---|---|---|---|
| (0,20] | 0.006 1 | 9.5 | 0.689 |
| (20,45] | 0.044 5 | 10.7 | 0.279 |
| (45,60] | 0.000 0 | 19.2 | 0.022 |
| (60,90] | -0.008 8 | 25.2 | 0.009 |
| (90,125] | -0.000 2 | 34.3 | 0.001 |
| (125,150] | 0.024 6 | 36.8 | 0.000 |
| (150,180] | 0.030 3 | 44.4 | 0.000 |
| (212,250] | 0.023 7 | 216.6 | 0.000 |
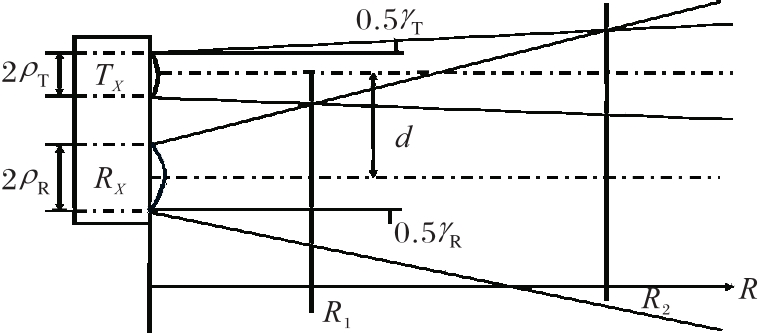
图5 双光束配置的LiDAR传感器示意图[23]
Fig. 5 Schematic diagram of LiDAR sensor with dual-beam configuration[23]

图6 单个LiDAR脉冲的接收信号功率比较[13]
Fig. 6 Comparison of received signal power of single LiDAR pulse[13]
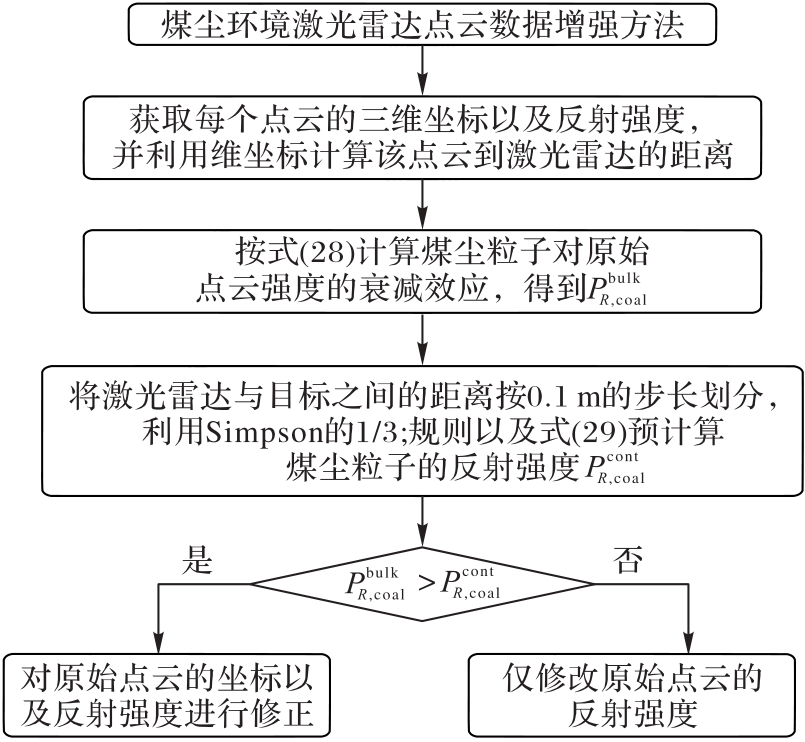
图7 煤尘环境点云仿真算法的流程
Fig. 7 Flow of point cloud simulation algorithm in coal dust environment

图8 照相机视角
Fig. 8 Camera perspective

图9 AutoMine数据集的仿真结果(示例1)
Fig. 9 Simulation results of AutoMine dataset (sample 1)
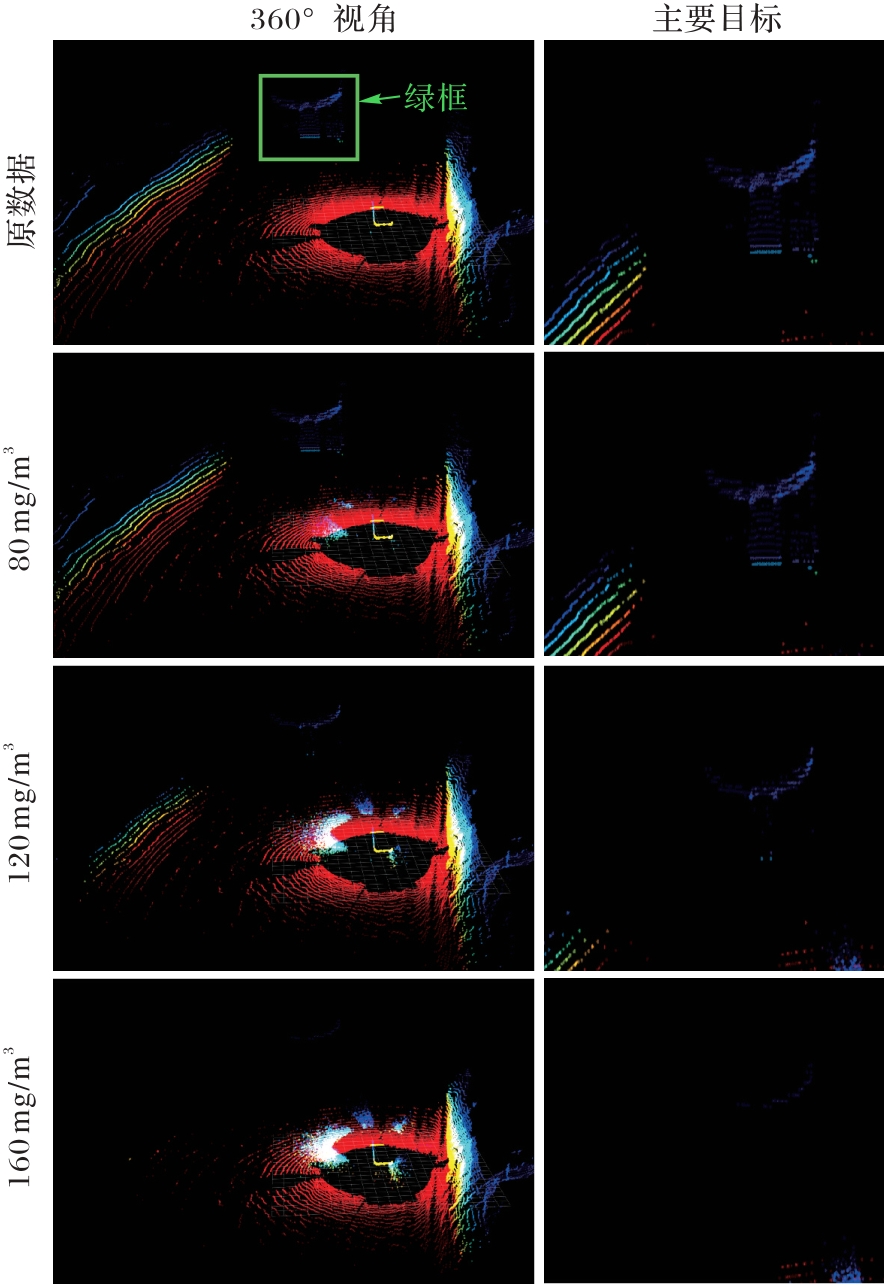
图10 AutoMine数据集的仿真结果(示例2)
Fig. 10 Simulation results of AutoMine dataset (sample 2)

图11 KITTI数据集的仿真结果(示例1)
Fig. 11 Simulation results of KITTI dataset (sample 1)

图12 KITTI数据集的仿真结果(示例2)
Fig. 12 Simulation results of KITTI dataset (sample 2)

图13 KITTI数据集的仿真结果(示例3)
Fig. 13 Simulation results of KITTI dataset (sample 3)
| 模型 | 数据 | 汽车 AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 95.89 | 85.88 | 86.23 | 63.04 | 45.90 | 42.60 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.01 | 86.35 | 86.41 | 64.31 | 51.42 | 47.56 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 91.88 | 80.10 | 77.41 | 50.57 | 43.89 | 39.97 | 70.35 | 51.67 | 48.22 |
| 仿真数据 | 92.90 | 81.98 | 78.26 | 54.06 | 45.63 | 40.88 | 70.95 | 52.51 | 49.97 | |
| PointRCNN | 原始数据 | 88.52 | 74.60 | 70.56 | 49.62 | 43.24 | 38.18 | 69.28 | 49.47 | 46.26 |
| 仿真数据 | 89.68 | 75.27 | 71.72 | 50.89 | 44.39 | 39.59 | 68.36 | 50.89 | 47.33 | |
| PointPillars | 原始数据 | 87.25 | 72.86 | 68.32 | 35.00 | 29.81 | 27.44 | 63.28 | 43.24 | 40.22 |
| 仿真数据 | 87.98 | 73.90 | 69.16 | 35.88 | 31.20 | 29.49 | 59.70 | 43.83 | 39.75 | |
| Voxel_RCNN_Car | 原始数据 | 98.56 | 92.85 | 91.12 | ||||||
| 仿真数据 | 98.38 | 93.57 | 91.68 | |||||||
表2 煤尘环境三维目标检测模型的检测精度 (%)
Tab. 2 Detection precisions of 3D object detection models in coal dust environment
| 模型 | 数据 | 汽车 AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 95.89 | 85.88 | 86.23 | 63.04 | 45.90 | 42.60 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.01 | 86.35 | 86.41 | 64.31 | 51.42 | 47.56 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 91.88 | 80.10 | 77.41 | 50.57 | 43.89 | 39.97 | 70.35 | 51.67 | 48.22 |
| 仿真数据 | 92.90 | 81.98 | 78.26 | 54.06 | 45.63 | 40.88 | 70.95 | 52.51 | 49.97 | |
| PointRCNN | 原始数据 | 88.52 | 74.60 | 70.56 | 49.62 | 43.24 | 38.18 | 69.28 | 49.47 | 46.26 |
| 仿真数据 | 89.68 | 75.27 | 71.72 | 50.89 | 44.39 | 39.59 | 68.36 | 50.89 | 47.33 | |
| PointPillars | 原始数据 | 87.25 | 72.86 | 68.32 | 35.00 | 29.81 | 27.44 | 63.28 | 43.24 | 40.22 |
| 仿真数据 | 87.98 | 73.90 | 69.16 | 35.88 | 31.20 | 29.49 | 59.70 | 43.83 | 39.75 | |
| Voxel_RCNN_Car | 原始数据 | 98.56 | 92.85 | 91.12 | ||||||
| 仿真数据 | 98.38 | 93.57 | 91.68 | |||||||
| 模型 | 数据 | 汽车AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 96.03 | 86.29 | 86.80 | 63.06 | 45.95 | 42.66 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.04 | 86.99 | 86.97 | 64.31 | 51.60 | 47.67 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 95.12 | 87.24 | 84.93 | 58.04 | 51.14 | 47.22 | 70.56 | 52.89 | 50.10 |
| 仿真数据 | 96.41 | 88.38 | 86.14 | 58.60 | 51.71 | 46.04 | 71.50 | 53.97 | 51.77 | |
| PointRCNN | 原始数据 | 92.48 | 83.19 | 79.23 | 52.66 | 47.52 | 41.27 | 71.38 | 52.09 | 48.67 |
| 仿真数据 | 93.58 | 84.21 | 79.88 | 54.50 | 48.63 | 42.63 | 74.00 | 55.90 | 52.89 | |
| PointPillars | 原始数据 | 92.09 | 85.05 | 82.00 | 44.63 | 38.75 | 35.73 | 66.85 | 48.11 | 44.94 |
| 仿真数据 | 93.55 | 85.94 | 83.16 | 45.77 | 39.76 | 36.13 | 61.28 | 48.90 | 44.23 | |
| Voxel_RCNN_Car | 原始数据 | 98.60 | 93.09 | 91.28 | ||||||
| 仿真数据 | 98.41 | 93.76 | 91.81 | |||||||
表3 煤尘环境鸟瞰图视角的检测精度 (%)
Tab. 3 Detection precisions from bird's-eye view in coal dust environment
| 模型 | 数据 | 汽车AP@0.7IoU | 行人AP@0.25IoU | 骑行者AP@0.25IoU | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Easy | Moderate | Hard | Easy | Moderate | Hard | Easy | Moderate | Hard | ||
| PV-RCNN++ | 原始数据 | 96.03 | 86.29 | 86.80 | 63.06 | 45.95 | 42.66 | 72.51 | 48.16 | 45.02 |
| 仿真数据 | 96.04 | 86.99 | 86.97 | 64.31 | 51.60 | 47.67 | 74.96 | 49.68 | 46.54 | |
| PV-RCNN | 原始数据 | 95.12 | 87.24 | 84.93 | 58.04 | 51.14 | 47.22 | 70.56 | 52.89 | 50.10 |
| 仿真数据 | 96.41 | 88.38 | 86.14 | 58.60 | 51.71 | 46.04 | 71.50 | 53.97 | 51.77 | |
| PointRCNN | 原始数据 | 92.48 | 83.19 | 79.23 | 52.66 | 47.52 | 41.27 | 71.38 | 52.09 | 48.67 |
| 仿真数据 | 93.58 | 84.21 | 79.88 | 54.50 | 48.63 | 42.63 | 74.00 | 55.90 | 52.89 | |
| PointPillars | 原始数据 | 92.09 | 85.05 | 82.00 | 44.63 | 38.75 | 35.73 | 66.85 | 48.11 | 44.94 |
| 仿真数据 | 93.55 | 85.94 | 83.16 | 45.77 | 39.76 | 36.13 | 61.28 | 48.90 | 44.23 | |
| Voxel_RCNN_Car | 原始数据 | 98.60 | 93.09 | 91.28 | ||||||
| 仿真数据 | 98.41 | 93.76 | 91.81 | |||||||
| [1] | 孙继平,程继杰.煤矿冲击地压和煤与瓦斯突出事故自动发现与报警方法研究[J].工矿自动化, 2024, 50(5): 1-5. |
| SUN J P, CHENG J J. Research on automatic detection and alarm methods for coal mine rock burst and coal and gas outburst accidents [J]. Journal of Mine Automation, 2024, 50(5): 1-5. | |
| [2] | BAO H, ZHANG R. Study on optimization of coal truck flow in open-pit mine [J]. Advances in Civil Engineering, 2020, 2020: 1-13. |
| [3] | ZHANG Z, CHEN X, HUANG J. Research on innovation posture of automated driving technology based on patentometrics [J]. Technology and Investment, 2018, 9(3): No.137. |
| [4] | 于明凯,陈留金,林泽阳,等.基于城市轨道交通无人驾驶技术的矿车无人驾驶系统[J].科技创新与应用, 2022, 12(1): 132-134. |
| YU M K, CHEN L J, LIN Z Y, et al. Autonomous mine car system based on urban rail transit unmanned technology [J]. Technology Innovation and Application, 2022, 12(1): 132-134. | |
| [5] | GAO Y, AI Y, TIAN B, et al. Parallel end-to-end autonomous mining: an IoT-oriented approach [J]. IEEE Internet of Things Journal, 2019, 7(2): 1011-1023. |
| [6] | ZHANG Y, CARBALLO A, YANG H, et al. Perception and sensing for autonomous vehicles under adverse weather conditions: a survey [J]. ISPRS Journal of Photogrammetry Remote Sensing, 2023, 196: 146-177. |
| [7] | URMSON C, ANHALT J, BAGNELL D, et al. Autonomous driving in urban environments: boss and the urban challenge [J]. Journal of Field Robotics, 2008, 25(8): 425-466. |
| [8] | ZAMANAKOS G, TSOCHATZIDIS L, AMANATIADIS A, et al. A comprehensive survey of LIDAR-based 3D object detection methods with deep learning for autonomous driving [J]. Computers Graphics, 2021, 99: 153-181. |
| [9] | DO A T, YOO M. LossDistillNet: 3D object detection in point cloud under harsh weather conditions [J]. IEEE Access, 2022, 10: 84882-84893. |
| [10] | HU X, DUAN Z, HUANG X, et al. Context-aware data augmentation for lidar 3D object detection [C]// Proceedings of the 2023 IEEE International Conference on Image Processing. Piscataway: IEEE, 2023: 11-15. |
| [11] | AN P, LIANG J, MA J, et al. RS-Aug: improve 3D object detection on LiDAR with realistic simulator based data augmentation [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 10165-10176. |
| [12] | ZHANG Y, DING M, YANG H, et al. LiDAR point cloud augmentation for adverse conditions using conditional generative model [J]. Remote Sensing, 2024, 16(12): No.2247. |
| [13] | HAHNER M, SAKARIDIS C, DAI D, et al. Fog simulation on real LiDAR point clouds for 3D object detection in adverse weather [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 15283-15292. |
| [14] | HAHNER M, SAKARIDIS C, BIJELIC M, et al. Lidar snowfall simulation for robust 3D object detection [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 16364-16374. |
| [15] | VARGAS RIVERO J R, GERBICH T, BUSCHARDT B, et al. Data augmentation of automotive lidar point clouds under adverse weather situations [J]. Sensors, 2021, 21(13): No.4503. |
| [16] | 张康,刘澈,王帅钦.激光雷达点云数据增强方法、装置、设备、介质及产品: CN202411081199.5 [P]. 2024-12-24. |
| ZHANG K, LIU C, WANG S Q. LiDAR point cloud data augmentation method, device, equipment, medium, and product: CN202411081199.5 [P]. 2024-12-24. | |
| [17] | 刘磊,郭二民,李忠华,等.加强“十四五”露天煤矿开采环境管理的建议[J].中国煤炭, 2021, 47(10): 61-66. |
| LIU L, GUO E M, LI Z H, et al. Suggestions on strengthening environmental management of open-pit coal mining during the 14th Five-Year Plan [J]. China Coal, 2021, 47(10): 61-66. | |
| [18] | 唐珏,王俊. “双碳”目标下煤炭发展及对策建议[J].中国矿业, 2023, 32(9): 22-31. |
| TANG Y, WANG J. Coal development and countermeasures under the goal of "double carbon" [J]. China Mining Magazine, 2023, 32(9): 22-31. | |
| [19] | WANG Z, ZHOU W, JISKANI I M, et al. Dust pollution in cold region Surface Mines and its prevention and control [J]. Environmental Pollution, 2022, 292(Part A): No.118293. |
| [20] | SWINEHART D F. The Beer-Lambert Law [J]. Journal of Chemical Education, 1962, 39(7): No.333. |
| [21] | LI B, MAO S, ZHANG H. Laser attenuation and ranging correction in the coal dust environment based on MIE theory and phase ranging principle [J]. Atmosphere, 2023, 14(5): No.845. |
| [22] | AZAM S, MISHRA D P. Effects of particle size, dust concentration and dust-dispersion-air pressure on rock dust inertant requirement for coal dust explosion suppression in underground coal mines [J]. Process Safety Environmental Protection, 2019, 126: 35-43. |
| [23] | RASSHOFER R H, SPIES M, SPIES H. Influences of weather phenomena on automotive laser radar systems [J]. Advances in Radio Science, 2011, 9: 49-60. |
| [24] | SASSEN K, DODD G C. Lidar crossover function and misalignment effects [J]. Applied Optics, 1982, 21(17): 3162-3165. |
| [25] | LI Y, LI Z, TENG S, et al. AutoMine: an unmanned mine dataset [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 21308-21317. |
| [26] | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| [27] | CHEN X, KUNDU K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 2147-2156. |
| [28] | SIMONELLI A, BULO S R, PORZI L, et al. Disentangling monocular 3d object detection [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1991-1999. |
| [29] | TEAM O. OpenPCDet: an open-source toolbox for 3D object detection from point clouds [EB/OL]. [2024-12-14]. . |
| [30] | SHI S, JIANG L, DENG J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection [J]. International Journal of Computer Vision, 2023, 131(2): 531-551. |
| [31] | SHI S, GUO C, JIANG L, et al. Pv-RCNN: point-voxel feature set abstraction for 3D object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10529-10538. |
| [32] | SHI S, WANG X, LI H. PointRCNN: 3D object proposal generation and detection from point cloud [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 770-779. |
| [33] | LANG A H, VORA S, CAESAR H, et al. PointPillars: fast encoders for object detection from point clouds [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 12697-12705. |
| [34] | DENG J, SHI S, LI P, et al. Voxel R-CNN: towards high performance voxel-based 3D object detection [J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021,32(2): 1201-1209. |
| [1] | 菅银龙, 陈学斌, 景忠瑞, 钟琪, 张镇博. 联邦学习中基于条件生成对抗网络的数据增强方案[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 21-32. |
| [2] | 谢斌红, 王瑞, 张睿, 张英俊. 代理原型蒸馏的小样本目标检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 233-241. |
| [3] | 李玟, 李开荣, 杨凯. 基于数据增强的子图感知对比学习[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 1-9. |
| [4] | 边小勇, 袁培洋, 胡其仁. 双编码空频混合的红外小目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 252-259. |
| [5] | 黄舒雯, 郭柯宇, 宋翔宇, 韩锋, 孙士杰, 宋焕生. 基于单目图像的多目标三维视觉定位方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 207-215. |
| [6] | 桑雨, 贡同, 赵琛, 于博文, 李思漫. 具有光度对齐的域适应夜间目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 242-251. |
| [7] | 昝志辉, 王雅静, 李珂, 杨智翔, 杨光宇. 基于SAA-CNN-BiLSTM网络的多特征融合语音情感识别方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 69-76. |
| [8] | 魏利利, 闫丽蓉, 唐晓芬. 上下文语义表征和像素关系纠正的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2993-3002. |
| [9] | 王闯, 俞璐, 陈健威, 潘成, 杜文博. 开集域适应综述[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2727-2736. |
| [10] | 张嘉祥, 李晓明, 张佳慧. 结合新类特征增强与度量机制的小样本目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2984-2992. |
| [11] | 李莉, 宋涵, 刘培鹤, 陈汉林. 基于数据增强和残差网络的敏感信息命名实体识别[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2790-2797. |
| [12] | 梁一鸣, 范菁, 柴汶泽. 基于双向交叉注意力的多尺度特征融合情感分类[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2773-2782. |
| [13] | 颜承志, 陈颖, 钟凯, 高寒. 基于多尺度网络与轴向注意力的3D目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2537-2545. |
| [14] | 廖炎华, 鄢元霞, 潘文林. 基于YOLOv9的交通路口图像的多目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2555-2565. |
| [15] | 谢斌红, 剌颖坤, 张英俊, 张睿. 自步学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2546-2554. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||