


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (3): 950-958.DOI: 10.11772/j.issn.1001-9081.2025040487
于银山( ), 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰
), 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰
收稿日期:2025-04-30
修回日期:2025-07-26
接受日期:2025-07-29
发布日期:2025-08-01
出版日期:2026-03-10
通讯作者:
于银山
作者简介:唐旭(2000—),女,江苏盐城人,硕士研究生,主要研究方向:目标检测、深度学习基金资助:
Yinshan YU(), Xu TANG, Mingjian DING, Wenkai HUANG, Jiawen BI, Guochen TAN
Received:2025-04-30
Revised:2025-07-26
Accepted:2025-07-29
Online:2025-08-01
Published:2026-03-10
Contact:
Yinshan YU
About author:TANG Xu, born in 2000, M. S. candidate. Her research interests include object detection, deep learning.Supported by:摘要:
随着自动驾驶技术的发展,实时车辆检测在确保系统安全性和可靠性方面至关重要。因此,设计一种基于YOLOv10的轻量化检测模型——YOLOv10-LITE。所提模型通过引入4个结构改进模块,在保持检测精度的同时,有效降低模型的复杂度和推理延迟,适用于资源受限环境下的实时检测任务。具体而言,使用动态上采样(DySample)模块在降低计算开销的同时提升特征图的分辨率;使用快速多尺度网络(FastMSNet)模块增强多尺度特征提取能力,提高对不同尺寸目标的检测效果;使用空间金字塔池化-局部选择性大核注意力(SPPF_LSKA)模块结合局部特征选择与全局上下文建模,从而有效捕获长程依赖;使用自适应细粒度通道注意力(AGFCA)模块通过通道与空间注意力的协同作用,提升关键特征信息的感知能力。在KITTI数据集上的实验结果表明,YOLOv10-LITE的平均精度均值(mAP)达到了77.1%,相较于YOLOv10提升了2.4个百分点;同时,参数量减少了8.7%。以上结果验证了所提模型在计算受限且需满足实时性的自动驾驶场景中的实用性。
中图分类号:
于银山, 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰. 基于YOLOv10的实时车辆检测算法[J]. 计算机应用, 2026, 46(3): 950-958.
Yinshan YU, Xu TANG, Mingjian DING, Wenkai HUANG, Jiawen BI, Guochen TAN. Real-time vehicle detection algorithm based on YOLOv10[J]. Journal of Computer Applications, 2026, 46(3): 950-958.
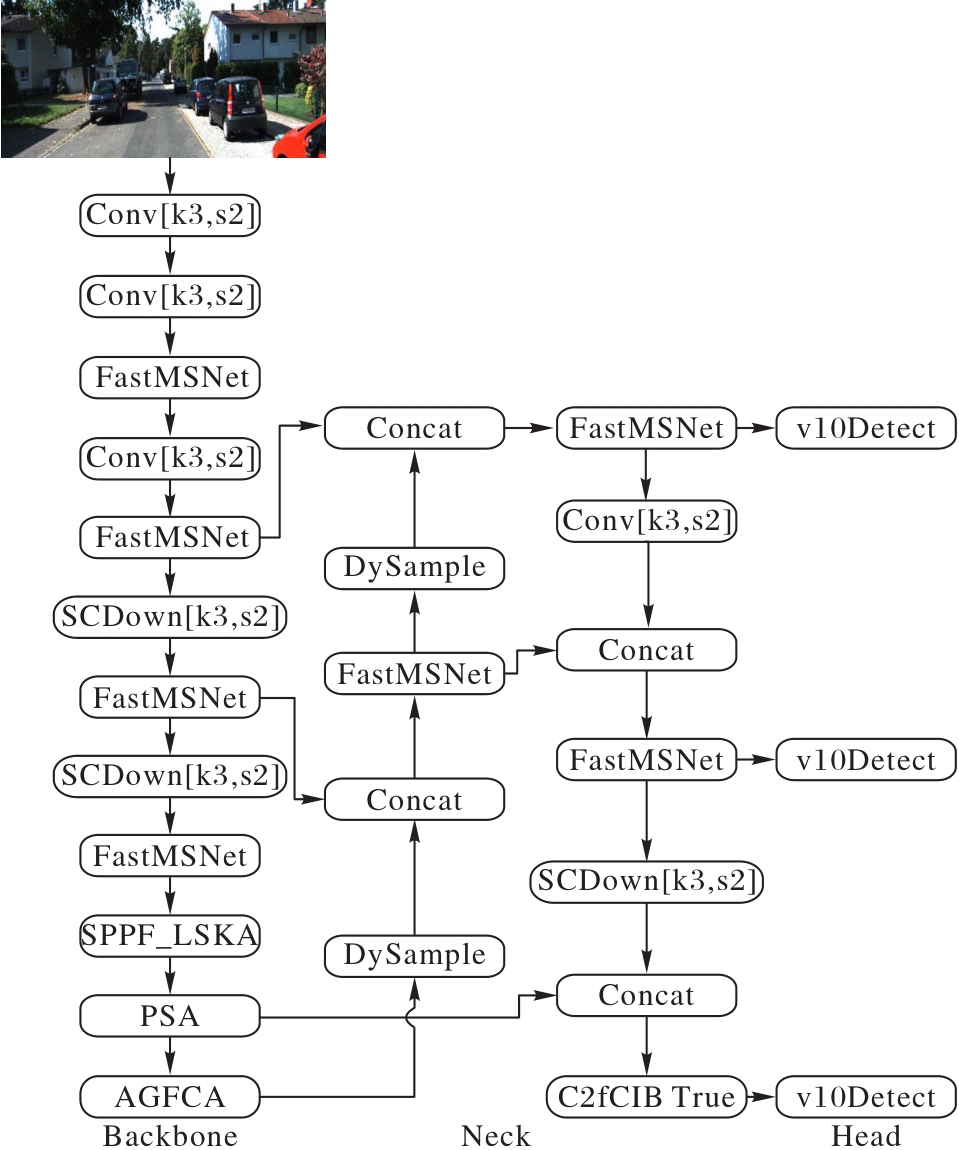
图1 YOLOv10-LITE的结构
Fig. 1 Structure of YOLOv10-LITE

图2 YOLOv10-LITE 的模块协同结构
Fig. 2 YOLOv10-LITE module collaboration structure
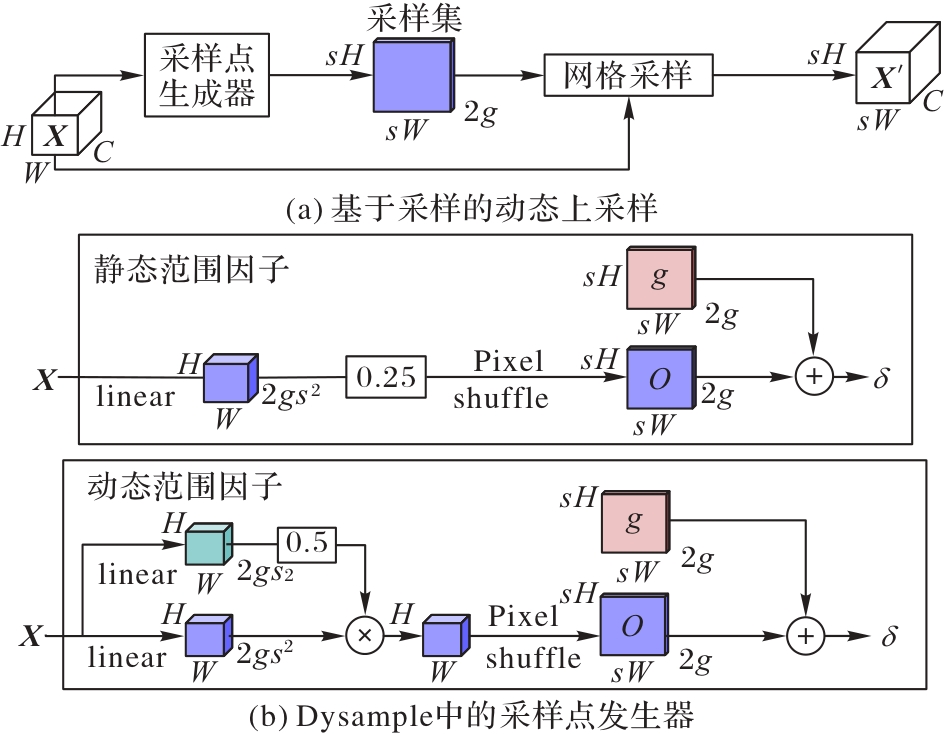
图3 DySample模块的结构
Fig. 3 Structure of DySample module
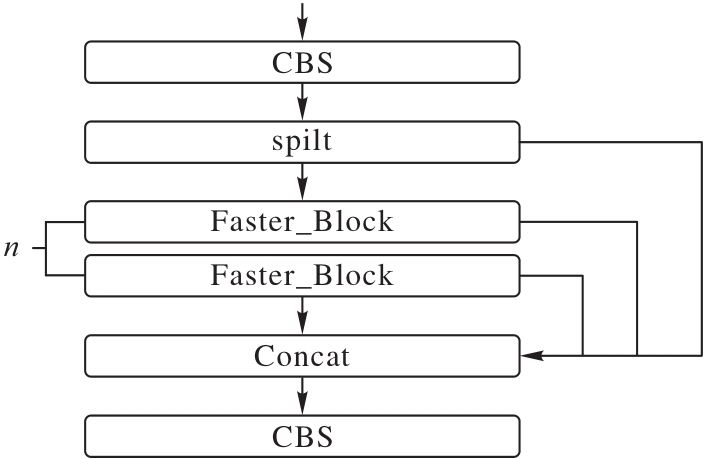
图4 C2f-Faster模块的结构
Fig. 4 Structure of C2f-Faster module

图5 FastMSNet模块的结构
Fig. 5 Structure of FastMSNet module
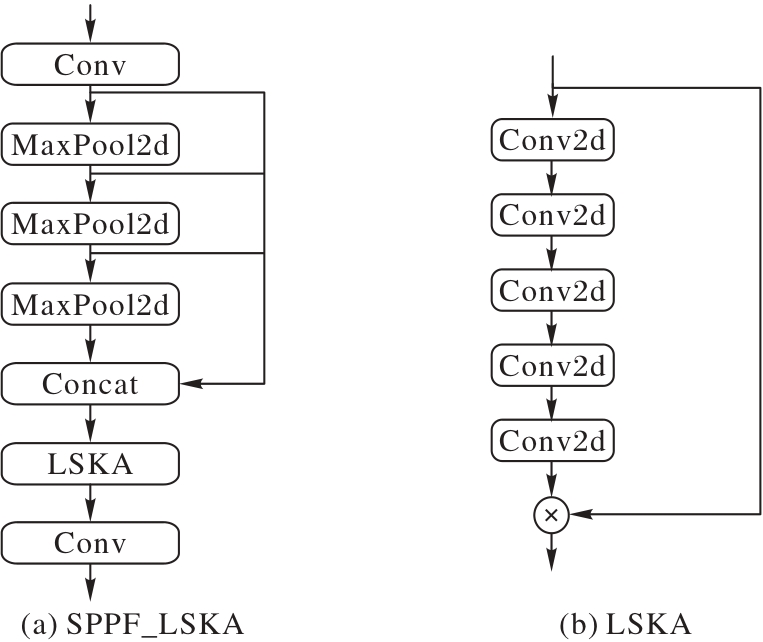
图6 SPPF_LSKA和LSKA模块的结构对比
Fig. 6 Structure comparison of SPPF_LSKA and LSKA modules
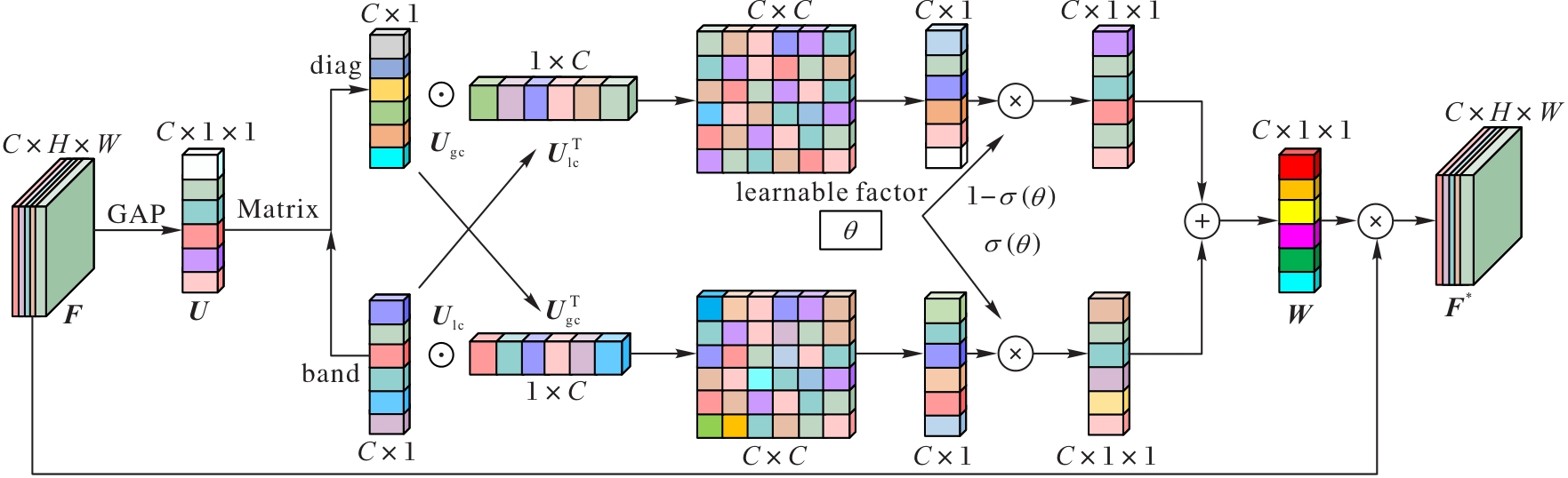
图7 AGFCA模块的结构
Fig. 7 Structure of AGFCA module
| 项目 | 参数 |
|---|---|
| 实验平台 | AutoDL 算力云 |
| 操作系统 | Ubuntu 18.04 |
| 显卡型号 | NVIDIA GeForce RTX 4090(24 GB) |
| CPU型号 | 16 vCPU Intel Xeon Gold 6430 |
| 内存 | 120 GB |
| Python版本 | Python 3.8 |
| 模型框架 | PyTorch2.0.0+cu118+torchvision 0.15.1 |
表1 实验环境配置
Tab. 1 Experimental environment configuration
| 项目 | 参数 |
|---|---|
| 实验平台 | AutoDL 算力云 |
| 操作系统 | Ubuntu 18.04 |
| 显卡型号 | NVIDIA GeForce RTX 4090(24 GB) |
| CPU型号 | 16 vCPU Intel Xeon Gold 6430 |
| 内存 | 120 GB |
| Python版本 | Python 3.8 |
| 模型框架 | PyTorch2.0.0+cu118+torchvision 0.15.1 |
| 名称 | 配置 | 名称 | 配置 |
|---|---|---|---|
| Epochs | 300 | Learn rate | 0.01 |
| Batch_size | 32 | workers | 8 |
| Momentum | 0.937 | Optimizer | SGD |
| Weight decay | 0.000 5 | imgsz | 640 |
表2 超参数配置
Tab. 2 Hyperparameter configuration
| 名称 | 配置 | 名称 | 配置 |
|---|---|---|---|
| Epochs | 300 | Learn rate | 0.01 |
| Batch_size | 32 | workers | 8 |
| Momentum | 0.937 | Optimizer | SGD |
| Weight decay | 0.000 5 | imgsz | 640 |
| 方法 | DySample | FastMSNet | SPPF_LSKA | AGFCA | mAP | 召回率 | 精度 | 浮点计算量/GFLOPs | 参数量/106 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.747 | 0.681 | 0.762 | 6.5 | 2.3 | ||||
| 2 | √ | 0.748 | 0.717 | 0.730 | 6.0 | 2.2 | |||
| 3 | √ | 0.721 | 0.664 | 0.729 | 5.0 | 1.7 | |||
| 4 | √ | 0.753 | 0.707 | 0.738 | 5.3 | 2.5 | |||
| 5 | √ | 0.747 | 0.682 | 0.753 | 6.5 | 2.3 | |||
| 6 | √ | √ | 0.742 | 0.687 | 0.745 | 5.1 | 1.8 | ||
| 7 | √ | √ | √ | 0.752 | 0.702 | 0.724 | 5.3 | 2.1 | |
| 8 | √ | √ | √ | √ | 0.771 | 0.706 | 0.779 | 5.4 | 2.1 |
表3 消融实验结果
Tab. 3 Ablation experimental results
| 方法 | DySample | FastMSNet | SPPF_LSKA | AGFCA | mAP | 召回率 | 精度 | 浮点计算量/GFLOPs | 参数量/106 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.747 | 0.681 | 0.762 | 6.5 | 2.3 | ||||
| 2 | √ | 0.748 | 0.717 | 0.730 | 6.0 | 2.2 | |||
| 3 | √ | 0.721 | 0.664 | 0.729 | 5.0 | 1.7 | |||
| 4 | √ | 0.753 | 0.707 | 0.738 | 5.3 | 2.5 | |||
| 5 | √ | 0.747 | 0.682 | 0.753 | 6.5 | 2.3 | |||
| 6 | √ | √ | 0.742 | 0.687 | 0.745 | 5.1 | 1.8 | ||
| 7 | √ | √ | √ | 0.752 | 0.702 | 0.724 | 5.3 | 2.1 | |
| 8 | √ | √ | √ | √ | 0.771 | 0.706 | 0.779 | 5.4 | 2.1 |
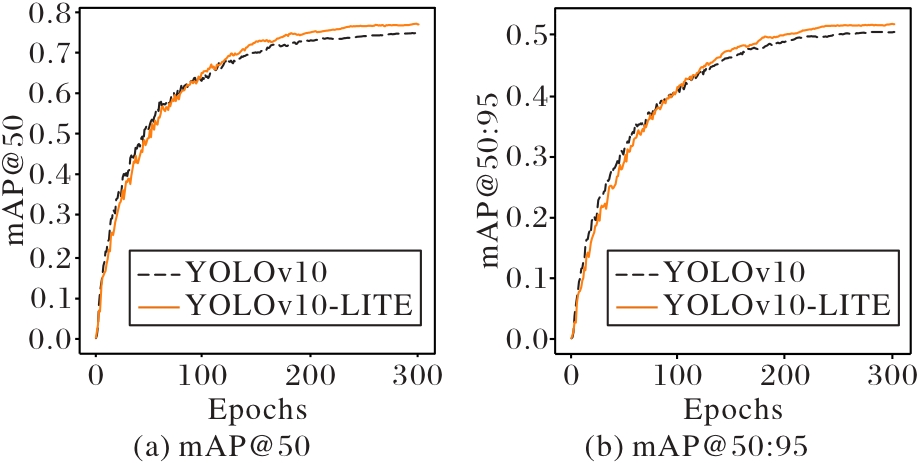
图8 模型改进前后的mAP曲线对比
Fig. 8 Comparison of mAP curves before and after model improvement

图9 消融实验的可视化对比
Fig. 9 Visualization comparison in ablation experiments
| 算法 | 输入尺寸 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| Faster-RCNN | 720×720 | 61.90 | 170.40 | 0.603 | 0.567 | 0.622 |
| SSD | 512×512 | 26.28 | 62.75 | 0.689 | 0.641 | 0.715 |
| RetinaNet[ | 112×112 | 31.20 | 63.20 | 0.595 | 0.554 | 0.612 |
| MobileNet[ | 256×256 | 4.30 | 12.60 | 0.706 | 0.663 | 0.728 |
| Tiny-YOLOv4[ | 768×384 | 5.60 | 20.40 | 0.697 | 0.647 | 0.738 |
| YOLOv5s | 640×640 | 4.50 | 16.20 | 0.729 | 0.684 | 0.745 |
| YOLOv6 | 640×640 | 4.20 | 11.80 | 0.712 | 0.665 | 0.745 |
| YOLOv9 | 640×640 | 2.60 | 10.70 | 0.738 | 0.681 | 0.770 |
| YOLOv8n | 640×640 | 3.20 | 8.40 | 0.741 | 0.678 | 0.765 |
| YOLOv10 | 640×640 | 2.30 | 6.50 | 0.747 | 0.681 | 0.762 |
| YOLOv10X | 640×640 | 3.20 | 10.40 | 0.698 | 0.643 | 0.712 |
| YOLOv10-masks | 640×640 | 2.40 | 6.80 | 0.752 | 0.715 | 0.766 |
| YOLOv10-WD | 640×640 | 4.10 | 11.60 | 0.714 | 0.673 | 0.756 |
| YOLOv10-LITE | 640×640 | 2.10 | 5.40 | 0.771 | 0.706 | 0.779 |
表4 不同算法的检测结果
Tab. 4 Detection results of different algorithms
| 算法 | 输入尺寸 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| Faster-RCNN | 720×720 | 61.90 | 170.40 | 0.603 | 0.567 | 0.622 |
| SSD | 512×512 | 26.28 | 62.75 | 0.689 | 0.641 | 0.715 |
| RetinaNet[ | 112×112 | 31.20 | 63.20 | 0.595 | 0.554 | 0.612 |
| MobileNet[ | 256×256 | 4.30 | 12.60 | 0.706 | 0.663 | 0.728 |
| Tiny-YOLOv4[ | 768×384 | 5.60 | 20.40 | 0.697 | 0.647 | 0.738 |
| YOLOv5s | 640×640 | 4.50 | 16.20 | 0.729 | 0.684 | 0.745 |
| YOLOv6 | 640×640 | 4.20 | 11.80 | 0.712 | 0.665 | 0.745 |
| YOLOv9 | 640×640 | 2.60 | 10.70 | 0.738 | 0.681 | 0.770 |
| YOLOv8n | 640×640 | 3.20 | 8.40 | 0.741 | 0.678 | 0.765 |
| YOLOv10 | 640×640 | 2.30 | 6.50 | 0.747 | 0.681 | 0.762 |
| YOLOv10X | 640×640 | 3.20 | 10.40 | 0.698 | 0.643 | 0.712 |
| YOLOv10-masks | 640×640 | 2.40 | 6.80 | 0.752 | 0.715 | 0.766 |
| YOLOv10-WD | 640×640 | 4.10 | 11.60 | 0.714 | 0.673 | 0.756 |
| YOLOv10-LITE | 640×640 | 2.10 | 5.40 | 0.771 | 0.706 | 0.779 |
| 数据集 | 模型 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| KITTI | YOLOv10 | 2.3 | 6.5 | 0.747 | 0.681 | 0.762 |
YOLOv10- LITE | 2.1 | 5.4 | 0.771 | 0.706 | 0.779 | |
BIT Vehicle | YOLOv10 | 2.2 | 6.5 | 0.961 | 0.918 | 0.918 |
YOLOv10- LITE | 2.2 | 5.7 | 0.980 | 0.939 | 0.956 |
表5 KITTI 与 BIT Vehicle 数据集上不同模型的性能对比
Tab. 5 Performance comparison of different models on KITTI and BIT Vehicle datasets
| 数据集 | 模型 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| KITTI | YOLOv10 | 2.3 | 6.5 | 0.747 | 0.681 | 0.762 |
YOLOv10- LITE | 2.1 | 5.4 | 0.771 | 0.706 | 0.779 | |
BIT Vehicle | YOLOv10 | 2.2 | 6.5 | 0.961 | 0.918 | 0.918 |
YOLOv10- LITE | 2.2 | 5.7 | 0.980 | 0.939 | 0.956 |
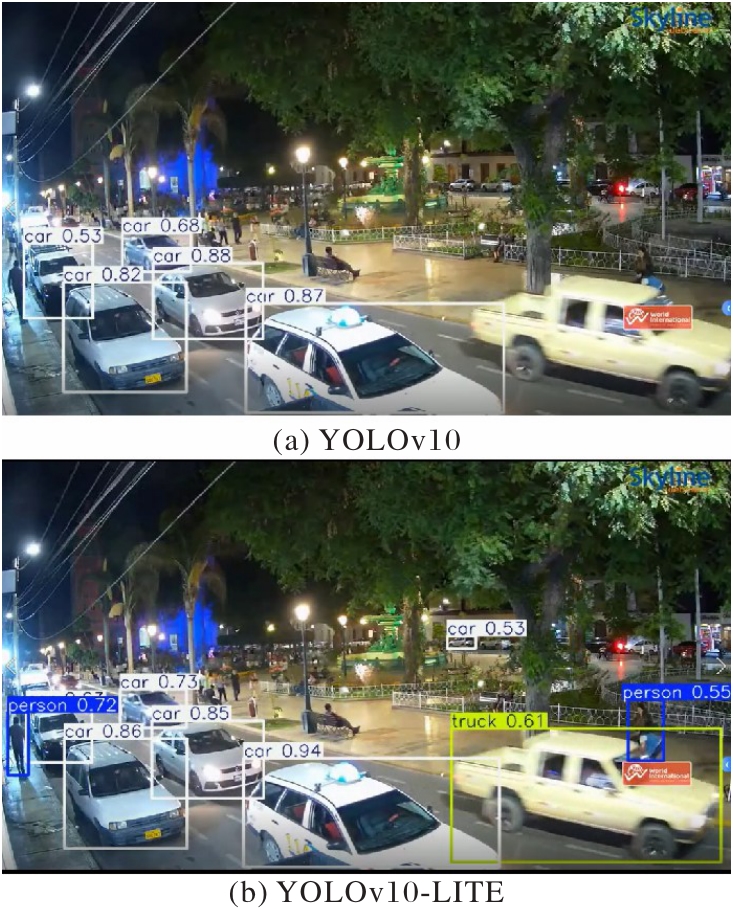
图10 视频检测效果的对比
Fig. 10 Comparison of video detection effects
| [1] | DAI X. HybridNet: a fast vehicle detection system for autonomous driving [J]. Signal Processing: Image Communication, 2019, 70: 79-88. |
| [2] | CHOUDHURY S, CHATTOPADHYAY S P, HAZRA T K. Vehicle detection and counting using Haar feature-based classifier [C]// Proceedings of the 8th Annual Industrial Automation and Electromechanical Engineering Conference. Piscataway: IEEE, 2017: 106-109. |
| [3] | WEI Y, TIAN Q, GUO J, et al. Multi-vehicle detection algorithm through combining Harr and HOG features [J]. Mathematics and Computers in Simulation, 2019, 155: 130-145. |
| [4] | 张依林,王学颖. 基于CNN-SVM的车辆检测与类型分类[J]. 电子技术与软件工程, 2022(7): 190-193. |
| ZHANG Y L, WANG X Y. Vehicle detection and type classification based on CNN-SVM[J]. Electronic Technology and Software Engineering, 2022(7): 190-193. | |
| [5] | LI Z, LIU F, YANG W, et al. A survey of convolutional neural networks: analysis, applications, and prospects [J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 33(12): 6999-7019. |
| [6] | LIANG F, ZHOU Y, CHEN X, et al. Review of target detection technology based on deep learning [C]// Proceedings of the 5th International Conference on Control Engineering and Artificial Intelligence. New York: ACM, 2021: 132-135. |
| [7] | KANG L, LU Z, MENG L, et al. YOLO-FA: type-1 fuzzy attention based YOLO detector for vehicle detection [J]. Expert Systems with Applications, 2024, 237(Pt B): No.121209. |
| [8] | LI Y, ZHANG M, ZHANG C, et al. YOLO-CCS: vehicle detection algorithm based on coordinate attention mechanism [J]. Digital Signal Processing, 2024, 153: No.104632. |
| [9] | CHENG X, QIU G, YU J, et al. An improved small object detection method based on Yolo V3 [J]. Pattern Analysis and Applications, 2021, 24(3): 1347-1355. |
| [10] | CAI Y, LUAN T, GAO H, et al. YOLOv4-5D: an effective and efficient object detector for autonomous driving [J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: No.4503613. |
| [11] | GUO L, ZHOU X, ZHAO Y, et al. Improved YOLOv7 algorithm incorporating InceptionNeXt and attention mechanism for vehicle detection under adverse lighting conditions [J]. Signal, Image and Video Processing, 2025, 19(4): No.299. |
| [12] | LIU L, LU S, ZHONG R, et al. Computing systems for autonomous driving: state of the art and challenges [J]. IEEE Internet of Things Journal, 2021, 8(8): 6469-6486. |
| [13] | LIU W, LU H, FU H, et al. Learning to upsample by learning to sample[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6004-6014. |
| [14] | DU D, XIE Y. Vehicle and pedestrian detection algorithm in an autonomous driving scene based on improved YOLOv8 [J]. Journal of Transportation Engineering, Part A: Systems, 2025, 151(1): No.8446. |
| [15] | LAU K W, PO L M, REHMAN Y A. Large separable kernel attention: rethinking the large kernel attention design in CNN [J]. Expert Systems with Applications, 2024, 236: No.121352. |
| [16] | GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset [J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| [17] | 赖勤波,马正华,朱蓉. 基于注意力机制和空洞卷积的无人机图像目标检测[J]. 计算机应用与软件, 2025, 42(2): 227-235. |
| LAI Q B, MA Z H, ZHU R. UAV image target detection based on attention mechanism and dilated convolution [J]. Computer Applications and Software, 2025, 42(2): 227-235. | |
| [18] | JEONG J, PARK H, KWAK N. Enhancement of SSD by concatenating feature maps for object detection [C]// Proceedings of the 2017 British Machine Vision Conference. Durham: BMVA Press, 2017: No.76. |
| [19] | LU X, SONG W. Improved YOLOv5s model for vehicle detection and recognition [C]// Proceedings of the 2022 International Conference on Intelligent Computing, LNCS 13395. Cham: Springer, 2022: 423-434. |
| [20] | LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications [EB/OL]. [2025-07-22].. |
| [21] | BAKIRCI M, BAYRAKTAR I. YOLOv9-enabled vehicle detection for urban security and forensics applications[C]// Proceedings of the 12th International Symposium on Digital Forensics and Security. Piscataway: IEEE, 2024: 1-6. |
| [22] | BAKIRCI M. Enhancing vehicle detection in intelligent transportation systems via autonomous UAV platform and YOLOv8 integration[J]. Applied Soft Computing, 2024, 164: No.112015. |
| [23] | ZHANG H. Real-time pedestrian detection algorithm of YOLOv10 under complex lighting and occlusion conditions [C]// Proceedings of the 2024 International Conference on Advances in Electrical Engineering and Computer Applications. Piscataway: IEEE, 2024: 645-650. |
| [24] | LI Y, YANG W, WANG L, et al. HawkEye Conv-driven YOLOv10 with advanced feature pyramid networks for small object detection in UAV imagery [J]. Drones, 2024, 8(12): No.713. |
| [25] | VELYCHKO D, SINGH S, MARKOPOULOS P P, et al. Image preprocessing and YOLO architectures for enhanced small and slow-moving object detection[C]// Proceedings of the 2024 IEEE Western New York Image and Signal Processing Workshop. Piscataway: IEEE, 2024: 1-4. |
| [26] | LI B, QIN Z, MU Y, et al. Small-target-driven YOLOV10-WD: Wasserstein distance optimization and adaptive scale fusion[EB/OL]. [2025-07-08]. . |
| [27] | 高旭,闫奥函,范文博,等. 基于ResNet网络的烟叶成熟度图像识别[J]. 农业灾害研究, 2025, 15(2): 52-54. |
| GAO X, YAN A H, FAN W B, et al. Image recognition of tobacco leaf maturity based on ResNet network [J]. Journal of Agricultural Catastrophology, 2025, 15(2): 52-54. | |
| [28] | RUBAN S, MOOSA JABEER M, SHENOY BASTI R. Improvising breast cancer detection using CNN, VGG and SSD algorithms [C]// Proceedings of the 3rd International Conference on Intelligent Computing Instrumentation and Control Technologies. Piscataway: IEEE, 2022: 1772-1776. |
| [29] | MIAO T, ZENG H, YANG W, et al. An improved lightweight RetinaNet for ship detection in SAR images [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 4667-4679. |
| [30] | HUANG S, HE Y, CHEN X. M-YOLO: a nighttime vehicle detection method combining MobileNet v2 and YOLO v3 [J]. Journal of Physics: Conference Series, 2021, 1883: No.012094. |
| [31] | MURTHY C B, HASHMI M F, KESKAR A G. EfficientLiteDet: a real-time pedestrian and vehicle detection algorithm [J]. Machine Vision and Applications, 2022, 33(3): No.47. |
| [32] | DONG Z, WU Y, PEI M, et al. Vehicle type classification using a semisupervised convolutional neural network [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2247-2256. |
| [1] | 樊跃波, 陈明轩, 汤显, 高永彬, 李文超. 基于多维频域特征融合的人物交互检测[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 580-586. |
| [2] | 李明光, 陶重犇. 基于Mamba模型的分级跨模态融合三维目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 572-579. |
| [3] | 刘权捷, 顾兆一, 王春源. 复杂光照条件下的不安全驾驶行为检测[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 613-619. |
| [4] | 李世伟, 周昱峰, 孙鹏飞, 刘伟松, 孟竹喧, 廉浩杰. 基于煤尘对激光雷达电磁波散射和吸收效应的点云数据增强方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 331-340. |
| [5] | 边小勇, 袁培洋, 胡其仁. 双编码空频混合的红外小目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 252-259. |
| [6] | 黄舒雯, 郭柯宇, 宋翔宇, 韩锋, 孙士杰, 宋焕生. 基于单目图像的多目标三维视觉定位方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 207-215. |
| [7] | 桑雨, 贡同, 赵琛, 于博文, 李思漫. 具有光度对齐的域适应夜间目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 242-251. |
| [8] | 谢斌红, 王瑞, 张睿, 张英俊. 代理原型蒸馏的小样本目标检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 233-241. |
| [9] | 张嘉祥, 李晓明, 张佳慧. 结合新类特征增强与度量机制的小样本目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2984-2992. |
| [10] | 魏利利, 闫丽蓉, 唐晓芬. 上下文语义表征和像素关系纠正的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2993-3002. |
| [11] | 谢斌红, 剌颖坤, 张英俊, 张睿. 自步学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2546-2554. |
| [12] | 彭海洋, 计卫星, 刘法旺. 基于区块链的自动驾驶仿真测试数据存证模型[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2421-2427. |
| [13] | 颜承志, 陈颖, 钟凯, 高寒. 基于多尺度网络与轴向注意力的3D目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2537-2545. |
| [14] | 廖炎华, 鄢元霞, 潘文林. 基于YOLOv9的交通路口图像的多目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2555-2565. |
| [15] | 陈亮, 王璇, 雷坤. 复杂场景下跨层多尺度特征融合的安全帽佩戴检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2333-2341. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||