


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (4): 1104-1114.DOI: 10.11772/j.issn.1001-9081.2025050548
彭海洋1, 刘天阳1, 计卫星2( ), 刘法旺3
), 刘法旺3
收稿日期:2025-05-19
修回日期:2025-07-18
接受日期:2025-07-25
发布日期:2025-08-01
出版日期:2026-04-10
通讯作者:
计卫星
作者简介:彭海洋(2000—),男,重庆人,硕士研究生,主要研究方向:自动驾驶仿真测试基金资助:
Haiyang PENG1, Tianyang LIU1, Weixing JI2(), Fawang LIU3
Received:2025-05-19
Revised:2025-07-18
Accepted:2025-07-25
Online:2025-08-01
Published:2026-04-10
Contact:
Weixing JI
About author:PENG Haiyang, born in 2000, M. S. candidate. His research interests include autonomous driving simulation testing.Supported by:摘要:
仿真测试是验证自动驾驶系统安全性和可靠性的重要技术之一。针对该过程中由场景数据明文共享使用导致的数据泄漏问题,提出一种针对场景数据的混淆保护方法。该方法包括数据重编码、命名替换、顺序扰乱、标签重构、触发条件混淆及事件混淆等混淆方法,并按混淆强度划分3个混淆等级,从而在不影响仿真测试结果的情况下提高场景数据的安全性。实验结果表明,混淆后的场景数据在仿真结果上与原始数据基本一致,误差在合理范围内,且随着混淆等级的提高,数据保护程度逐渐增强。一级和二级混淆方法对仿真效率无显著影响,三级混淆方法虽引入了一定的额外计算开销,但仍保持在合理范围内。整体上,三级混淆方法体系能够在保持合理的仿真性能的基础上,有效防止数据泄漏,为自动驾驶仿真测试场景数据保护提供可行的解决方案。
中图分类号:
彭海洋, 刘天阳, 计卫星, 刘法旺. 基于混淆的自动驾驶仿真测试场景数据保护方法[J]. 计算机应用, 2026, 46(4): 1104-1114.
Haiyang PENG, Tianyang LIU, Weixing JI, Fawang LIU. Obfuscation-based protection method for scenario data in autonomous driving simulation testing[J]. Journal of Computer Applications, 2026, 46(4): 1104-1114.
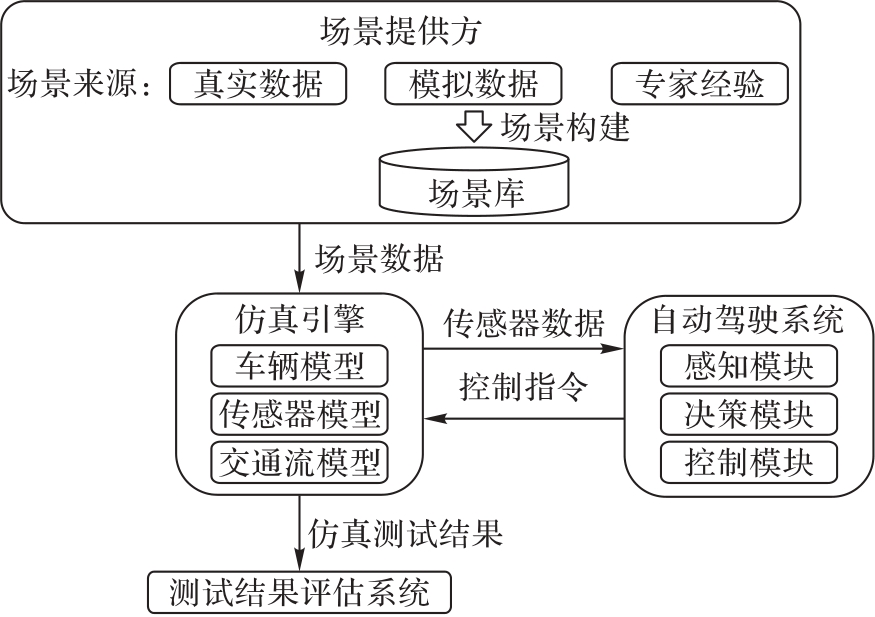
图1 基于场景的自动驾驶仿真测试框架
Fig. 1 Framework of scenario-based autonomous driving simulation testing
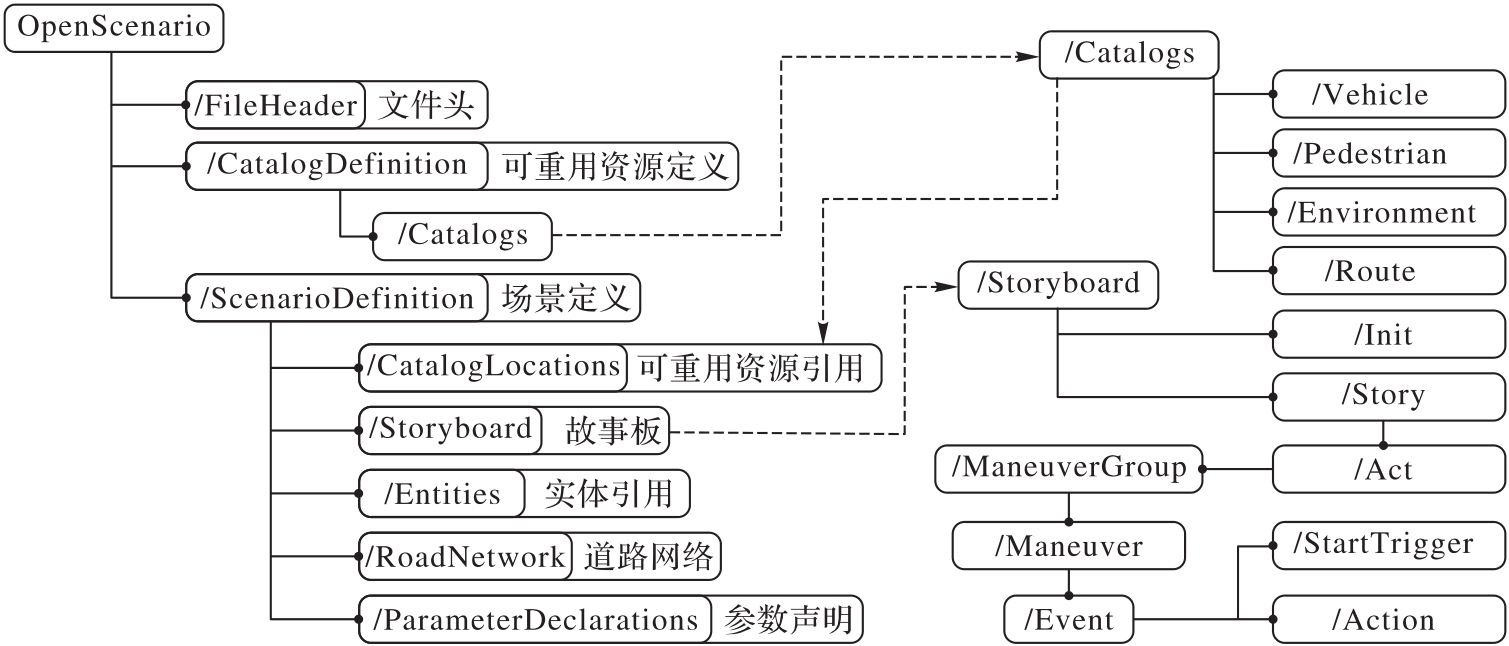
图2 OpenScenario数据模型
Fig. 2 Data model of OpenScenario
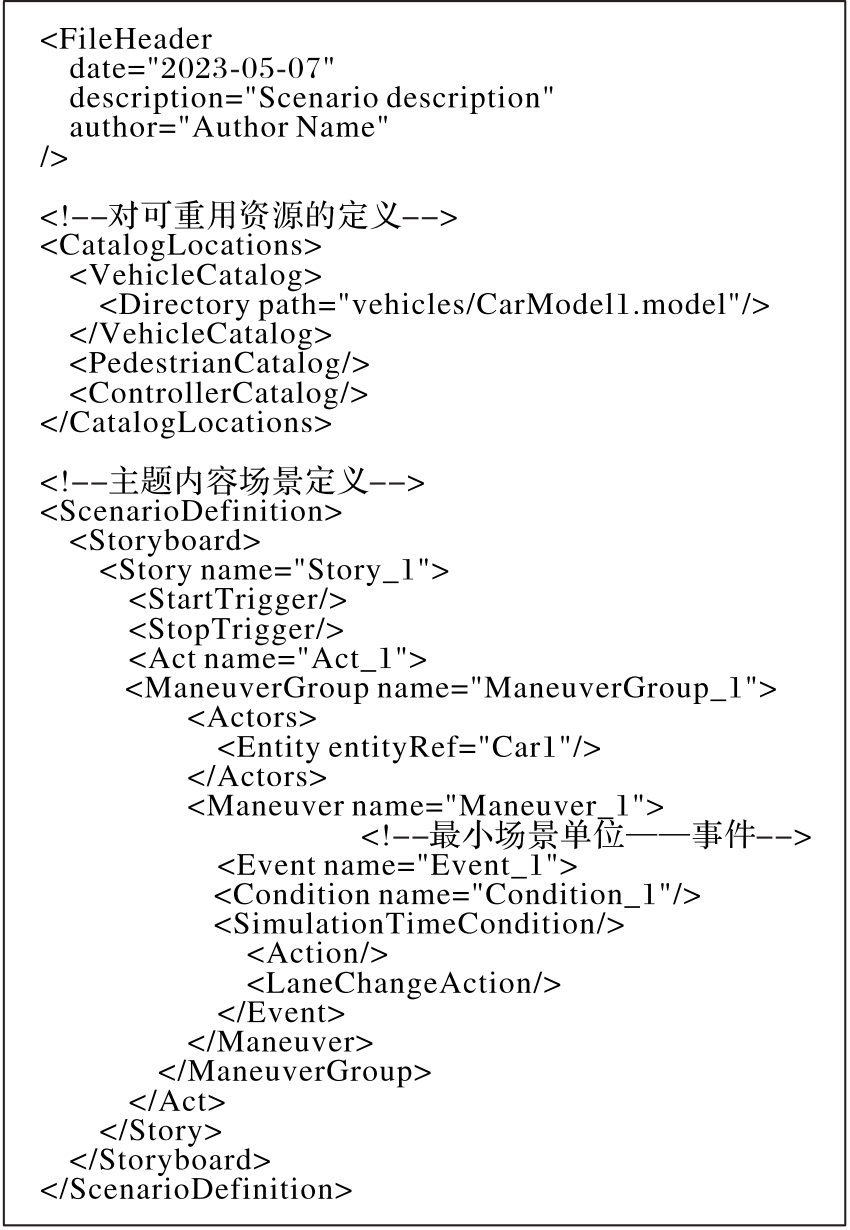
图3 OpenScenario场景数据示例
Fig. 3 Example of OpenScenario scenario data
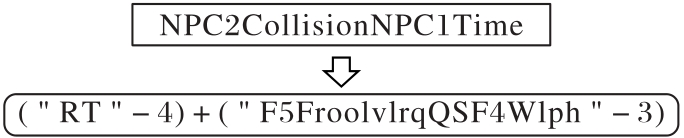
图4 数据重编码案例
Fig. 4 Example of data re-encoding
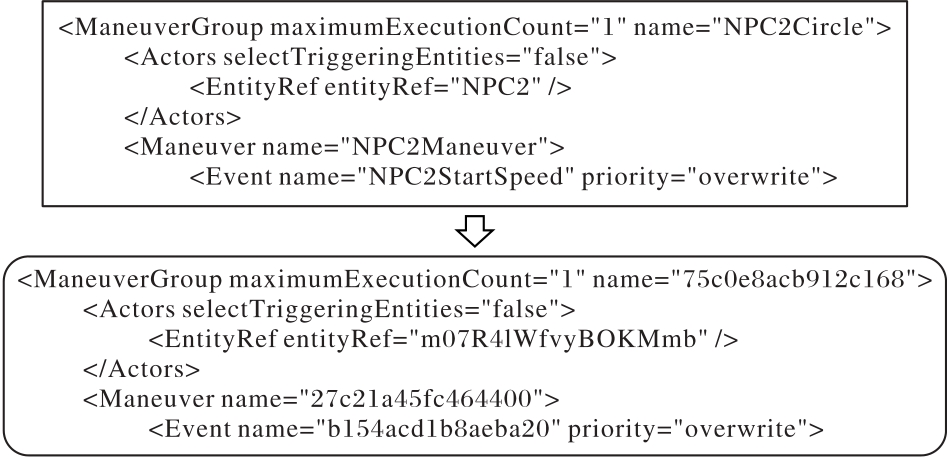
图5 命名替换案例
Fig. 5 Example of name replacement
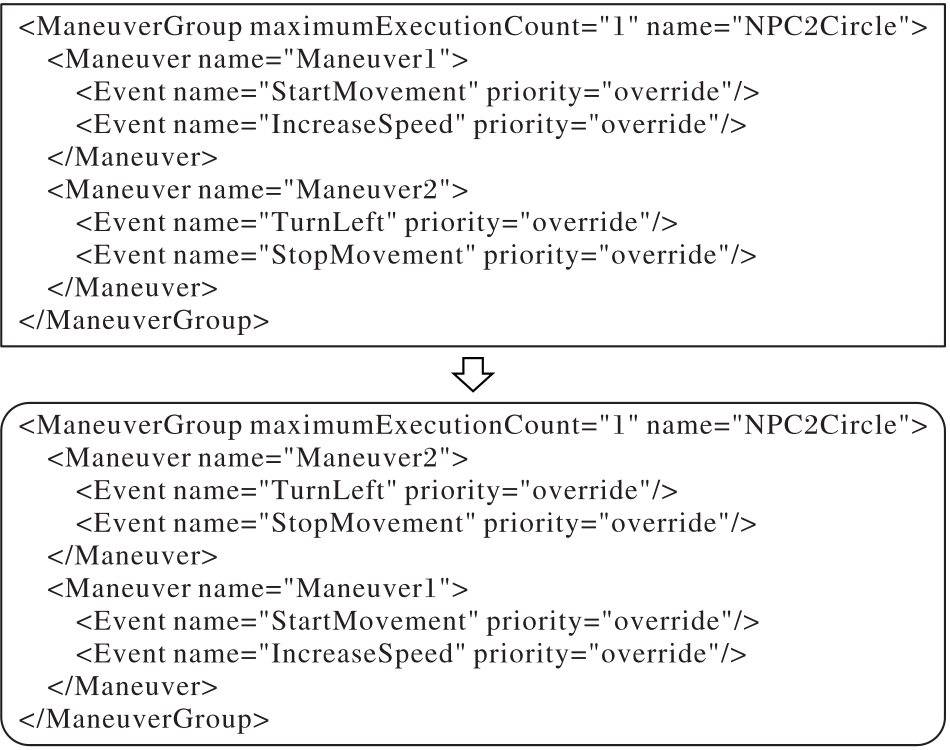
图6 顺序扰乱案例
Fig. 6 Example of sequence scrambling
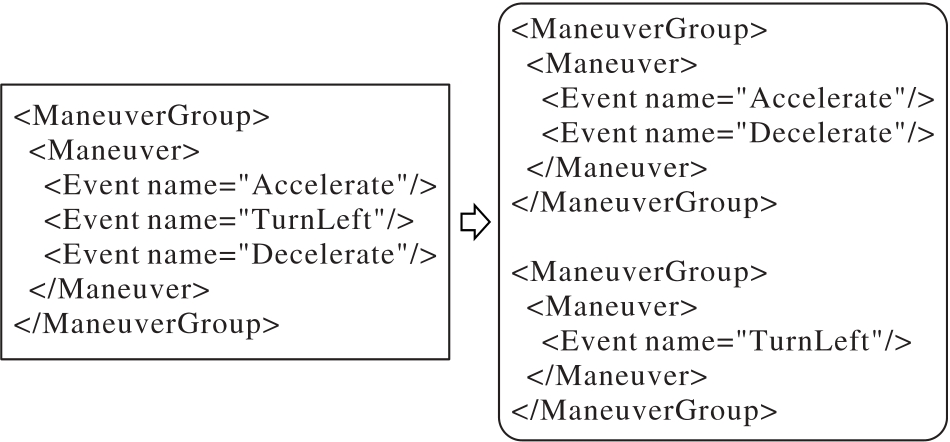
图7 标签重构案例
Fig. 7 Example of label reconstruction
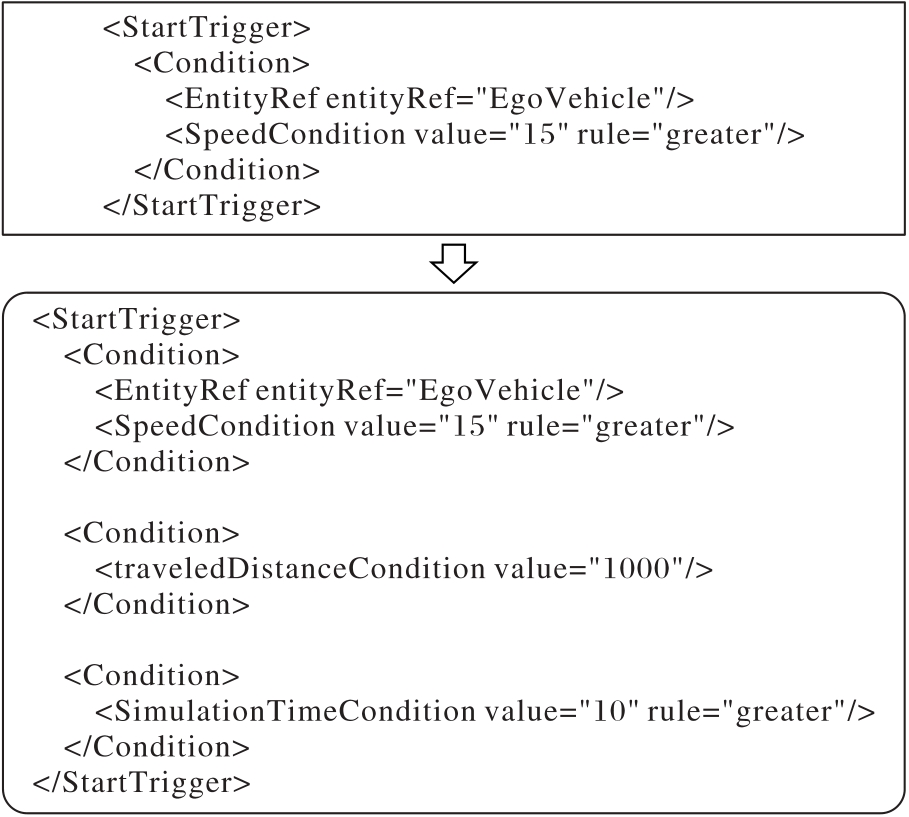
图8 触发条件混淆案例
Fig. 8 Example of trigger condition obfuscation
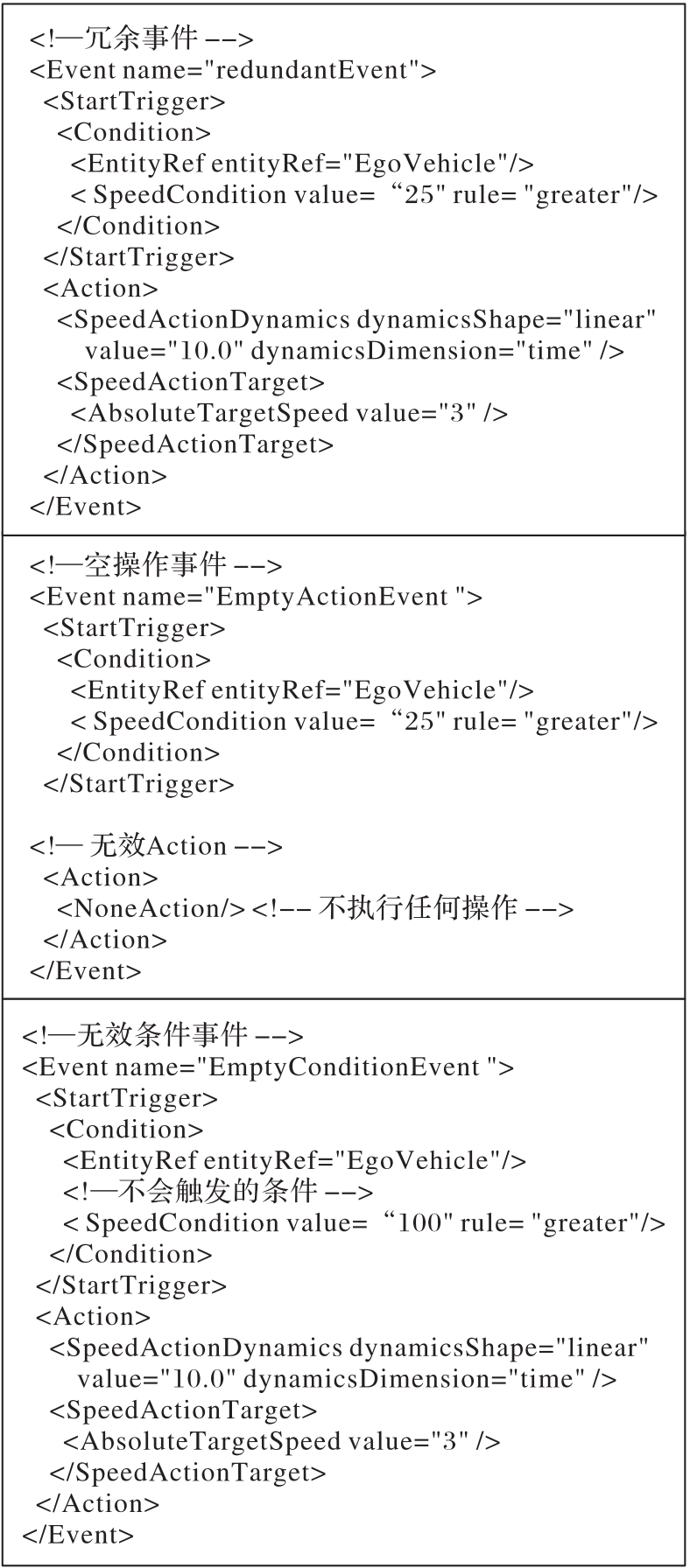
图9 事件混淆案例
Fig. 9 Examples of event obfuscation
| 混淆强度 | 适用敏感性 | 适用复杂度 | 适用执行效率要求 |
|---|---|---|---|
| 低(一级/二级) | 一般或中等敏感度场景 | 高复杂度但安全要求不高的场景 | 实时性要求高的仿真任务 |
| 高(三级) | 高敏感度、关键功能相关场景 | 简单结构但需高安全保障的场景 | 可容忍一定延迟的仿真测试任务 |
表1 根据场景数据特征推荐的混淆等级选择策略
Tab. 1 Obfuscation level selection strategy recommended based on scenario data characteristics
| 混淆强度 | 适用敏感性 | 适用复杂度 | 适用执行效率要求 |
|---|---|---|---|
| 低(一级/二级) | 一般或中等敏感度场景 | 高复杂度但安全要求不高的场景 | 实时性要求高的仿真任务 |
| 高(三级) | 高敏感度、关键功能相关场景 | 简单结构但需高安全保障的场景 | 可容忍一定延迟的仿真测试任务 |
| 场景类型 | 推荐混淆组合 | 适用目标 |
|---|---|---|
| 普通测试场景 | 命名替换+数据重编码 | 基础保护,轻量混淆 |
| 城市道路交互场景 | 命名替换+顺序扰乱+标签重构 | 弱化结构语义,增强解析困难 |
| 极端场景 | 命名替换+标签重构+条件混淆+事件混淆 | 全流程混淆,难以逆向还原 |
表2 典型仿真场景中推荐的混淆等级选择策略
Tab. 2 Obfuscation level selection strategy recommended for typical simulation scenarios
| 场景类型 | 推荐混淆组合 | 适用目标 |
|---|---|---|
| 普通测试场景 | 命名替换+数据重编码 | 基础保护,轻量混淆 |
| 城市道路交互场景 | 命名替换+顺序扰乱+标签重构 | 弱化结构语义,增强解析困难 |
| 极端场景 | 命名替换+标签重构+条件混淆+事件混淆 | 全流程混淆,难以逆向还原 |
| 混淆方法 | 文本差异度 | 关键词相似度 | 结构相似度 |
|---|---|---|---|
| 数据重编码 | 28.51 | 91.18 | 100.00 |
| 命名替换 | 10.47 | 93.06 | 100.00 |
| 顺序扰乱 | 31.15 | 100.00 | 76.73 |
| 标签重构 | 69.02 | 99.35 | 71.01 |
表3 混淆方法影响的评估结果 (%)
Tab. 3 Evaluation results influenced by obfuscation methods
| 混淆方法 | 文本差异度 | 关键词相似度 | 结构相似度 |
|---|---|---|---|
| 数据重编码 | 28.51 | 91.18 | 100.00 |
| 命名替换 | 10.47 | 93.06 | 100.00 |
| 顺序扰乱 | 31.15 | 100.00 | 76.73 |
| 标签重构 | 69.02 | 99.35 | 71.01 |
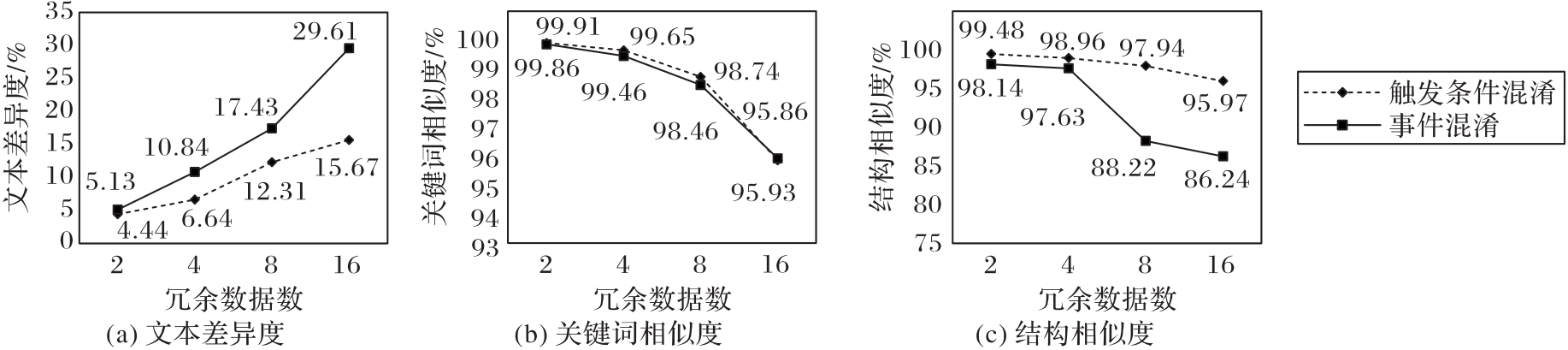
图10 三级混淆方法影响的评估结果
Fig. 10 Evaluation results influenced by three-level obfuscation methods
| 车辆实体 | 平均位置 | 平均速度/(m·s-1) | 最大位置差/m | 最大速度差/(m·s-1) | 平均帧数 |
|---|---|---|---|---|---|
| NPC1 | [-27.69, 201.57, 1.02] | 7.74 | 2.02 | 0.04 | 15 076.04 |
| NPC2 | [-118.13, 208.62, 8.31] | 7.91 | 0.37 | 0.00 | |
| NPC3 | [-166.77, 201.90, 8.82] | 5.93 | 0.59 | 0.01 | |
| NPC4 | [-118.02, 202.10, 8.31] | 5.93 | 0.36 | 0.01 |
表4 原始场景数据的仿真结果
Tab. 4 Simulation results of original scenario data
| 车辆实体 | 平均位置 | 平均速度/(m·s-1) | 最大位置差/m | 最大速度差/(m·s-1) | 平均帧数 |
|---|---|---|---|---|---|
| NPC1 | [-27.69, 201.57, 1.02] | 7.74 | 2.02 | 0.04 | 15 076.04 |
| NPC2 | [-118.13, 208.62, 8.31] | 7.91 | 0.37 | 0.00 | |
| NPC3 | [-166.77, 201.90, 8.82] | 5.93 | 0.59 | 0.01 | |
| NPC4 | [-118.02, 202.10, 8.31] | 5.93 | 0.36 | 0.01 |
| 混淆方法 | 最大实体位置差/m | 最大实体速度差/(m·s-1) |
|---|---|---|
| 数据重编码 | 0.97 | 0.02 |
| 命名替换 | 0.64 | 0.01 |
| 顺序扰乱 | 0.43 | 0.01 |
| 标签重构 | 1.10 | 0.02 |
| 触发条件混淆 | 0.49 | 0.01 |
| 顺序混淆 | 0.53 | 0.01 |
表5 混淆场景数据的仿真结果误差
Tab. 5 Errors in simulation results of obfuscated scenario data
| 混淆方法 | 最大实体位置差/m | 最大实体速度差/(m·s-1) |
|---|---|---|
| 数据重编码 | 0.97 | 0.02 |
| 命名替换 | 0.64 | 0.01 |
| 顺序扰乱 | 0.43 | 0.01 |
| 标签重构 | 1.10 | 0.02 |
| 触发条件混淆 | 0.49 | 0.01 |
| 顺序混淆 | 0.53 | 0.01 |
| 测试用例 | 最大位置误差 | |||||
|---|---|---|---|---|---|---|
| 数据重编码 | 命名替换 | 顺序扰乱 | 标签重构 | 触发条件混淆 | 事件混淆 | |
| alks_scenario_4_1_1_free_driving_template | 0.11 | 0.09 | 0.14 | 0.22 | 0.17 | 0.19 |
| alks_scenario_4_2_1_swerve_lead_vehicle_template | 0.08 | 0.06 | 0.12 | 0.20 | 0.21 | 0.23 |
| alks_scenario_4_2_2_swerve_side_vehicle_template | 0.13 | 0.11 | 0.09 | 0.16 | 0.24 | 0.27 |
| alks_scenario_4_2_4_swerve_partial_occlusion_template | 0.07 | 0.05 | 0.10 | 0.18 | 0.15 | 0.16 |
| alks_scenario_4_3_1_follow_lead_vehicle_template | 0.09 | 0.08 | 0.11 | 0.15 | 0.12 | 0.14 |
| alks_scenario_4_3_2_follow_braking_lead_vehicle_template | 0.10 | 0.09 | 0.07 | 0.14 | 0.19 | 0.21 |
| alks_scenario_4_4_1_cut_in_no_collision_template | 0.06 | 0.04 | 0.13 | 0.17 | 0.18 | 0.20 |
| alks_scenario_4_4_2_cut_in_collision_template | 0.12 | 0.07 | 0.09 | 0.19 | 0.22 | 0.25 |
| alks_scenario_4_5_1_cut_out_no_collision_template | 0.14 | 0.13 | 0.16 | 0.23 | 0.26 | 0.29 |
| alks_scenario_4_5_2_cut_out_collision_template | 0.05 | 0.03 | 0.08 | 0.12 | 0.14 | 0.15 |
| alks_scenario_4_6_1_sensor_visibility_template | 0.11 | 0.09 | 0.14 | 0.22 | 0.17 | 0.19 |
| alks_scenario_4_6_2_sensor_visibility_lane_change_template | 0.08 | 0.06 | 0.12 | 0.20 | 0.21 | 0.23 |
| alks_scenario_4_6_3_sensor_visibility_adverse_weather_template | 0.13 | 0.11 | 0.09 | 0.16 | 0.24 | 0.27 |
| alks_scenario_4_6_4_sensor_visibility_low_light_template | 0.07 | 0.05 | 0.10 | 0.18 | 0.15 | 0.16 |
| alks_scenario_4_6_5_sensor_visibility_high_speed_template | 0.09 | 0.08 | 0.11 | 0.15 | 0.12 | 0.14 |
表6 公开场景仿真测试结果的实体位置最大误差 (m)
Tab. 6 Entity position maximum errors in simulation testing results of open-source scenarios
| 测试用例 | 最大位置误差 | |||||
|---|---|---|---|---|---|---|
| 数据重编码 | 命名替换 | 顺序扰乱 | 标签重构 | 触发条件混淆 | 事件混淆 | |
| alks_scenario_4_1_1_free_driving_template | 0.11 | 0.09 | 0.14 | 0.22 | 0.17 | 0.19 |
| alks_scenario_4_2_1_swerve_lead_vehicle_template | 0.08 | 0.06 | 0.12 | 0.20 | 0.21 | 0.23 |
| alks_scenario_4_2_2_swerve_side_vehicle_template | 0.13 | 0.11 | 0.09 | 0.16 | 0.24 | 0.27 |
| alks_scenario_4_2_4_swerve_partial_occlusion_template | 0.07 | 0.05 | 0.10 | 0.18 | 0.15 | 0.16 |
| alks_scenario_4_3_1_follow_lead_vehicle_template | 0.09 | 0.08 | 0.11 | 0.15 | 0.12 | 0.14 |
| alks_scenario_4_3_2_follow_braking_lead_vehicle_template | 0.10 | 0.09 | 0.07 | 0.14 | 0.19 | 0.21 |
| alks_scenario_4_4_1_cut_in_no_collision_template | 0.06 | 0.04 | 0.13 | 0.17 | 0.18 | 0.20 |
| alks_scenario_4_4_2_cut_in_collision_template | 0.12 | 0.07 | 0.09 | 0.19 | 0.22 | 0.25 |
| alks_scenario_4_5_1_cut_out_no_collision_template | 0.14 | 0.13 | 0.16 | 0.23 | 0.26 | 0.29 |
| alks_scenario_4_5_2_cut_out_collision_template | 0.05 | 0.03 | 0.08 | 0.12 | 0.14 | 0.15 |
| alks_scenario_4_6_1_sensor_visibility_template | 0.11 | 0.09 | 0.14 | 0.22 | 0.17 | 0.19 |
| alks_scenario_4_6_2_sensor_visibility_lane_change_template | 0.08 | 0.06 | 0.12 | 0.20 | 0.21 | 0.23 |
| alks_scenario_4_6_3_sensor_visibility_adverse_weather_template | 0.13 | 0.11 | 0.09 | 0.16 | 0.24 | 0.27 |
| alks_scenario_4_6_4_sensor_visibility_low_light_template | 0.07 | 0.05 | 0.10 | 0.18 | 0.15 | 0.16 |
| alks_scenario_4_6_5_sensor_visibility_high_speed_template | 0.09 | 0.08 | 0.11 | 0.15 | 0.12 | 0.14 |
| 混淆方法 | 平均仿真时间 | 混淆方法 | 平均仿真时间 |
|---|---|---|---|
| 无混淆 | 88.46 | 标签重构 | 89.87 |
| 数据重编码 | 89.02 | 触发条件混淆 | 91.12 |
| 命名替换 | 90.52 | 事件混淆 | 92.56 |
| 顺序扰乱 | 90.11 |
表7 混淆场景仿真的执行时间 ( s)
Tab. 7 Simulation execution time of obfuscation scenarios
| 混淆方法 | 平均仿真时间 | 混淆方法 | 平均仿真时间 |
|---|---|---|---|
| 无混淆 | 88.46 | 标签重构 | 89.87 |
| 数据重编码 | 89.02 | 触发条件混淆 | 91.12 |
| 命名替换 | 90.52 | 事件混淆 | 92.56 |
| 顺序扰乱 | 90.11 |
| [1] | CHIB P S, SINGH P. Recent advancements in end-to-end autonomous driving using deep learning: a survey[J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 103-118. |
| [2] | KIRAN B R, SOBH I, TALPAERT V, et al. Deep reinforcement learning for autonomous driving: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 4909-4926. |
| [3] | 朱向雷,王海弛,尤翰墨,等. 自动驾驶智能系统测试研究综述[J]. 软件学报, 2021, 32(7): 2056-2077. |
| ZHU X L, WANG H C, YOU H M, et al. Survey on testing of intelligent systems in autonomous vehicles[J]. Journal of Software, 2021, 32(7): 2056-2077. | |
| [4] | 赵祥模国家重点研发计划( 2021 YFB2501200)团队. 自动驾驶测试与评价技术研究进展[J]. 交通运输工程学报, 2023, 23(6): 10-77. |
| ZHAO Xiang-mo’s team supported by the National Key Research and Development Program of China (2021 YFB2501200). Research progress in testing and evaluation technologies for autonomous driving[J]. Journal of Traffic and Transportation Engineering, 2023, 23(6): 10-77. | |
| [5] | 冯洋,夏志龙,郭安,等. 自动驾驶软件测试技术研究综述[J]. 中国图象图形学报, 2021, 26(1): 13-27. |
| FENG Y, XIA Z L, GUO A, et al. Survey of testing techniques of autonomous driving software[J]. Journal of Image and Graphics, 2021, 26(1): 13-27. | |
| [6] | SHAH S, DEY D, LOVETT C, et al. AirSim: high-fidelity visual and physical simulation for autonomous vehicles[C]// Field and Service Robotics: Results of the 11th International Conference, SPAR 5. Cham: Springer, 2018: 621-635. |
| [7] | RONG G, SHIN B H, TABATABAEE H, et al. LGSVL Simulator: a high fidelity simulator for autonomous driving[C]// Proceedings of the IEEE 23rd International Conference on Intelligent Transportation Systems. Piscataway: IEEE, 2020: 1-6. |
| [8] | Inc Baidu. Apollo autonomous driving platform[EB/OL]. [2025-03-20].. |
| [9] | NYAKUNDI N B N, REYNOLDS S M, REZA H. Scenario-based approach to systematically derive test cases for systems[C]// Proceedings of the 2023 IEEE International Conference on Electro-Information Technology. Piscataway: IEEE, 2023: 51-58. |
| [10] | 朱冰,张培兴,赵健,等. 基于场景的自动驾驶汽车虚拟测试研究进展[J]. 中国公路学报, 2019, 32(6): 1-19. |
| ZHU B, ZHANG P X, ZHAO J, et al. Review of scenario-based virtual validation methods for automated vehicles[J]. China Journal of Highway and Transport, 2019, 32(6): 1-19. | |
| [11] | 廖瑗,褚观耀,程前. 自动驾驶仿真测试场景库体系建设方法综述[J]. 机械制造与自动化, 2024, 53(4): 271-275. |
| LIAO Y, CHU G Y, CHENG Q. Summary of construction method of scene library system based on automatic driving simulation test[J]. Machine Building and Automation, 2024, 53(4): 271-275. | |
| [12] | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part Ⅰ: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(3): 1573-1582. |
| [13] | FENG S, FENG Y, SUN H, et al. Testing scenario library generation for connected and automated vehicles, part Ⅱ: case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 5635-5647. |
| [14] | 邓伟文,李江坤,任秉韬,等. 面向自动驾驶的仿真场景自动生成方法综述[J]. 中国公路学报, 2022, 35(1): 316-333. |
| DENG W W, LI J K, REN B T, et al. A survey on automatic simulation scenario generation methods for autonomous driving[J]. China Journal of Highway and Transport, 2022, 35(1): 316-333. | |
| [15] | ARIEF M, GLYNN P, ZHAO D. An accelerated approach to safely and efficiently test pre-production autonomous vehicles on public streets[C]// Proceedings of the 21st International Conference on Intelligent Transportation Systems. Piscataway: IEEE, 2018: 2006-2011. |
| [16] | TAN S, WONG K, WANG S, et al. SceneGen: learning to generate realistic traffic scenes[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 892-901. |
| [17] | 中汽数据研究中心有限公司. 中国交通事故危险工况场景[DB/OL].[2025-03-20].. |
| China Automotive Technology and Research Center. China Typical Scenario Library[DB/OL].[2025-03-20].. | |
| [18] | 中国汽车工程研究院股份有限公司. 中国典型场景库[DB/OL]. [2025-03-20].. |
| China Automotive Engineering Research Institute Co.Ltd. China typical scenario library[DB/OL]. [2025-03-20].. | |
| [19] | Waymo LLC. Waymo Open Dataset[DB/OL]. [2025-03-20].. |
| [20] | DOSOVITSKIY A, ROS G, CODEVILLA F, et al. CARLA: an open urban driving simulator[C]// Proceedings of the 1st Annual Conference on Robot Learning. New York: JMLR.org, 2017: 1-16. |
| [21] | CARLA. ROS bridge for CARLA simulator[EB/OL]. [2025-03-20].. |
| [22] | 张宇嘉,张啸川,庞建民. 代码混淆技术研究综述[J]. 信息工程大学学报, 2017, 18(5): 635-640. |
| ZHANG Y J, ZHANG X C, PANG J M. Survey on code obfuscation research[J]. Journal of Information Engineering University, 2017, 18(5): 635-640. | |
| [23] | 王建民,余志伟,王朝坤,等. Java程序混淆技术综述[J]. 计算机学报, 2011, 34(9): 1578-1588. |
| WANG J M, YU Z W, WANG C K, et al. A survey on Java program obfuscation techniques[J]. Chinese Journal of Computers, 2011, 34(9): 1578-1588. | |
| [24] | JULLIEN J M, MARTEL C, VIGNOLLET L, et al. OpenScenario: a flexible integrated environment to develop educational activities based on pedagogical scenarios[C]// Proceedings of the 9th IEEE International Conference on Advanced Learning Technologies. Piscataway: IEEE, 2009: 509-513. |
| [25] | FREMONT D J, DREOSSI T, GHOSH S, et al. Scenic: a language for scenario specification and scene generation[C]// Proceedings of the 40th ACM SIGPLAN Conference on Programming Language Design and Implementation. New York: ACM, 2019: 63-78. |
| [26] | QUEIROZ R, BERGER T, CZARNECKI K. GeoScenario: an open DSL for autonomous driving scenario representation[C]// Proceedings of the 2019 IEEE Intelligent Vehicles Symposium. Piscataway: IEEE, 2019: 287-294. |
| [27] | openMSL. sl-3-1-osc-alks-scenarios[DB/OL]. [2025-03-20]. . |
| [1] | 于银山, 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰. 基于YOLOv10的实时车辆检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 950-958. |
| [2] | 李明光, 陶重犇. 基于Mamba模型的分级跨模态融合三维目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 572-579. |
| [3] | 彭海洋, 计卫星, 刘法旺. 基于区块链的自动驾驶仿真测试数据存证模型[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2421-2427. |
| [4] | 苏锦涛, 葛丽娜, 肖礼广, 邹经, 王哲. 联邦学习中针对后门攻击的检测与防御方案[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2399-2408. |
| [5] | 魏境烽, 姚中原, 马硕森, 王超, 郭尚坤, 朱自强, 斯雪明. 区块链技术在碳排放交易系统中的应用综述[J]. 《计算机应用》唯一官方网站, 2025, 45(12): 3872-3880. |
| [6] | 邓亚平, 李迎江. YOLO算法及其在自动驾驶场景中目标检测综述[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1949-1958. |
| [7] | 葛超, 张嘉滨, 王蕾, 伦志新. 基于模型预测控制的自动驾驶车辆轨迹规划[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1959-1964. |
| [8] | 陈美宏, 袁凌云, 夏桐. 基于主从多链的数据分类分级访问控制模型[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1148-1157. |
| [9] | 廖存燚, 郑毅, 刘玮瑾, 于欢, 刘守印. 自动驾驶环境感知多任务去耦-融合算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 424-431. |
| [10] | 冯睿琪, 王雷蕾, 林翔, 熊金波. 基于软件防护扩展的车联网路况监测安全数据处理框架[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1870-1877. |
| [11] | 张京, 朱爱红. 基于遗传算法和粒子群优化的列车自动驾驶速度曲线优化方法[J]. 《计算机应用》唯一官方网站, 2022, 42(2): 599-605. |
| [12] | 申玉民, 王金龙, 胡殿凯, 刘星宇. 基于区块链的建筑信息模型图纸多人协同创作系统[J]. 计算机应用, 2021, 41(8): 2338-2345. |
| [13] | 李朝, 兰海, 魏宪. 基于注意力的毫米波-激光雷达融合目标检测[J]. 计算机应用, 2021, 41(7): 2137-2144. |
| [14] | 秦静, 安雯, 季长清, 汪祖民. 无线体域网隐私保护机制研究综述[J]. 计算机应用, 2021, 41(4): 970-975. |
| [15] | 高昊昱, 李雷孝, 林浩, 李杰, 邓丹, 李少旭. 区块链在数据完整性保护领域的研究与应用进展[J]. 计算机应用, 2021, 41(3): 745-755. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||