


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (2): 666-675.DOI: 10.11772/j.issn.1001-9081.2025030298
• 前沿与综合应用 • 上一篇
花伟祥, 徐为民( )
)
收稿日期:2025-03-25
修回日期:2025-05-09
接受日期:2025-05-12
发布日期:2025-05-26
出版日期:2026-02-10
通讯作者:
徐为民
作者简介:花伟祥(1998—),男,安徽宿州人,硕士研究生,主要研究方向:实时视觉检测、图像处理基金资助:Received:2025-03-25
Revised:2025-05-09
Accepted:2025-05-12
Online:2025-05-26
Published:2026-02-10
Contact:
Weimin XU
About author:HUA Weixiang, born in 1998, M. S. candidate. His research interests include real-time visual detection, image processing.Supported by:摘要:
针对桥式起重机负载摆角检测中的非匀速运动模糊、光照变化及背景干扰问题,提出一种基于单目视觉负载摆角的实时检测方法。该方法以球形标记为特征目标,并构建通道与空间可靠性自适应特征跟踪器(CSRT-AFT)与梯度分层自适应圆检测(GHACD)算法的协同框架。首先,CSRT-AFT通过动态轨迹滤波与特征自适应机制实现鲁棒跟踪:设计自适应多模态轨迹滤波,并基于曲率变化率与加速度突变指数智能切换滤波策略,抑制剧烈运动的轨迹抖动;结合动态定向快速和旋转BRIEF(ORB)特征提取、加权K维(K-D)特征筛选和最小中值平方法(LMedS)进行特征匹配及弹性模板更新,从而增强运动模糊和复杂光照下的特征匹配稳定性;其次,为了实现目标的快速精确定位,在通过图像预处理增强鲁棒性的基础上,GHACD利用梯度场引导候选圆心生成,采用多阶段概率采样及几何约束验证,实现亚像素级的快速圆检测;最后,结合桥式起重机的工作空间建立负载摆角测量模型。实验结果表明,所提方法在不同小车运动速度和复杂条件如光照变化及遮挡下均能稳定检测负载目标的摆角,并大幅提升了检测的精度与实时性。
中图分类号:
花伟祥, 徐为民. 桥式起重机负载摆角自适应跟踪与梯度圆检测方法[J]. 计算机应用, 2026, 46(2): 666-675.
Weixiang HUA, Weimin XU. Adaptive tracking and gradient circle detection method for load swing angle of bridge crane[J]. Journal of Computer Applications, 2026, 46(2): 666-675.
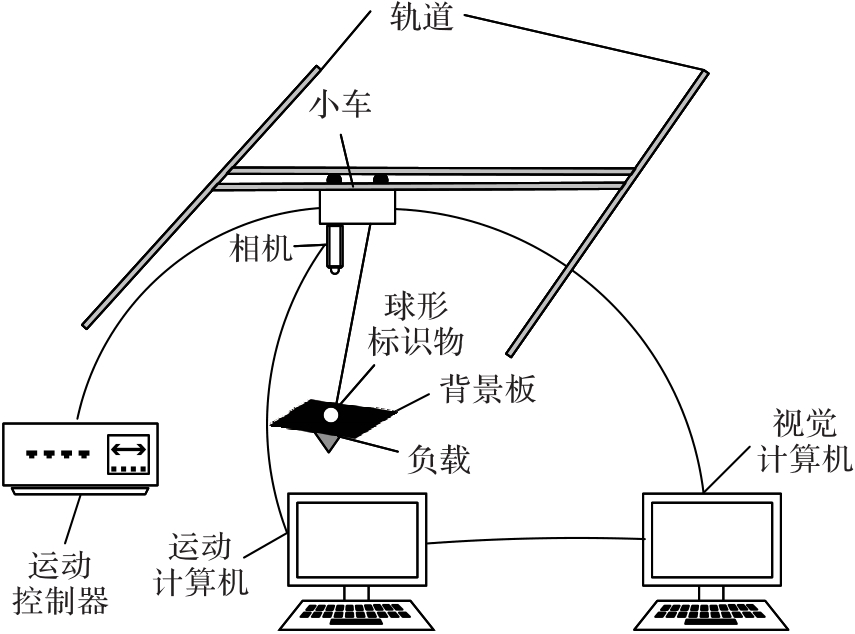
图1 桥式起重机负载摆角检测系统
Fig. 1 Bridge crane load swing angle detection system
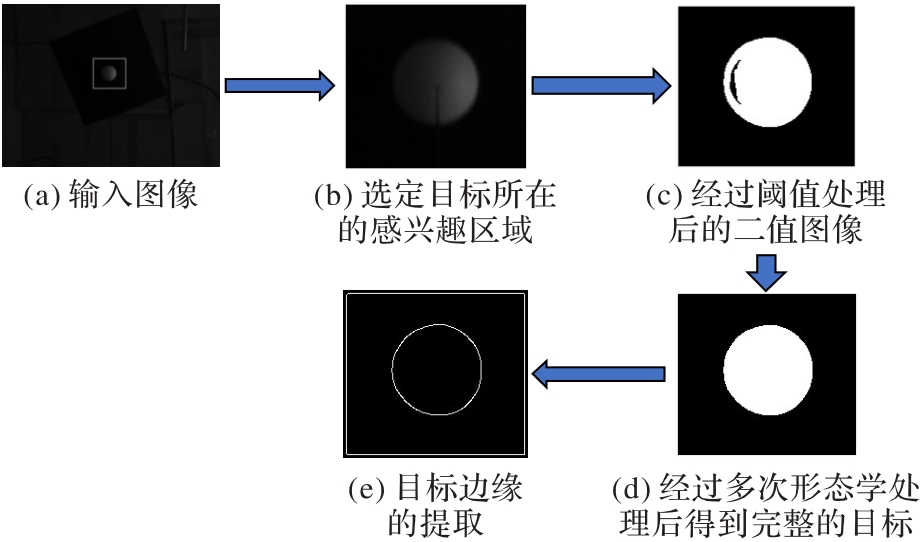
图2 目标预处理过程
Fig. 2 Target preprocessing process
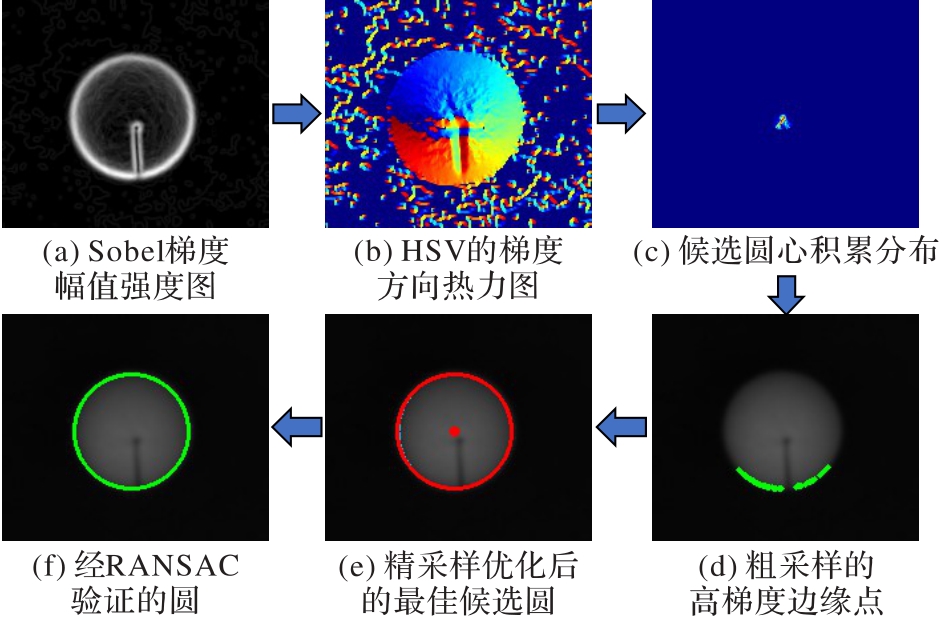
图3 圆检测过程
Fig. 3 Circle detection process
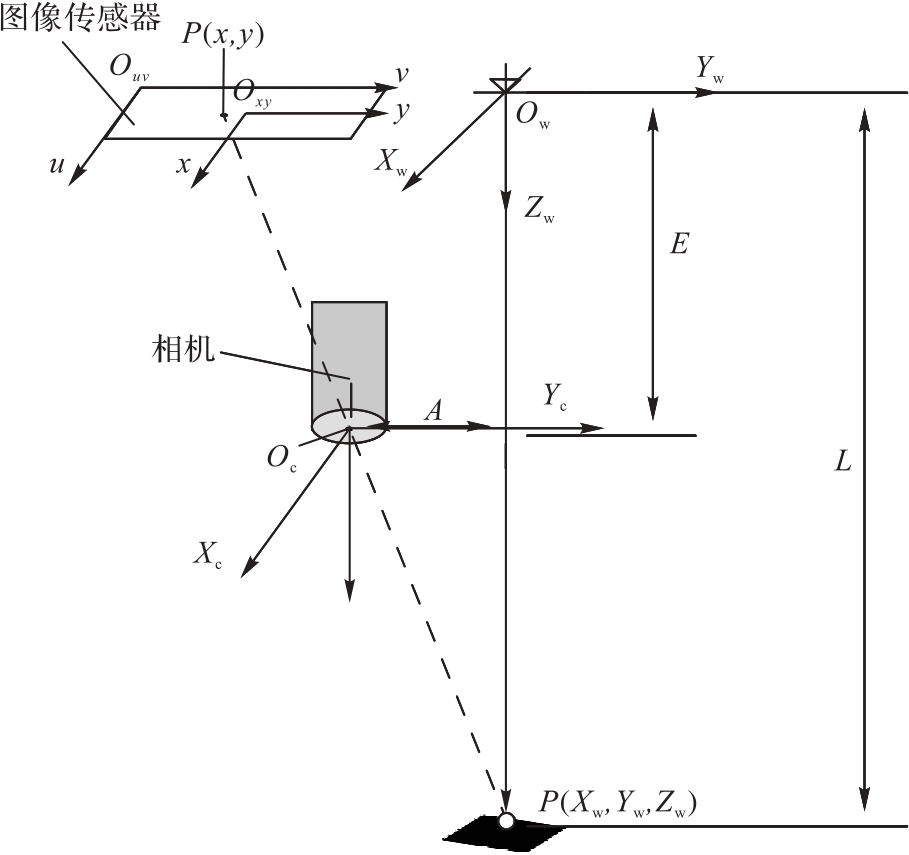
图4 相机与负载间的几何关系
Fig. 4 Geometric relationship between camera and load

图5 桥式起重机的视觉实验平台
Fig. 5 Vision experimental platform of bridge crane
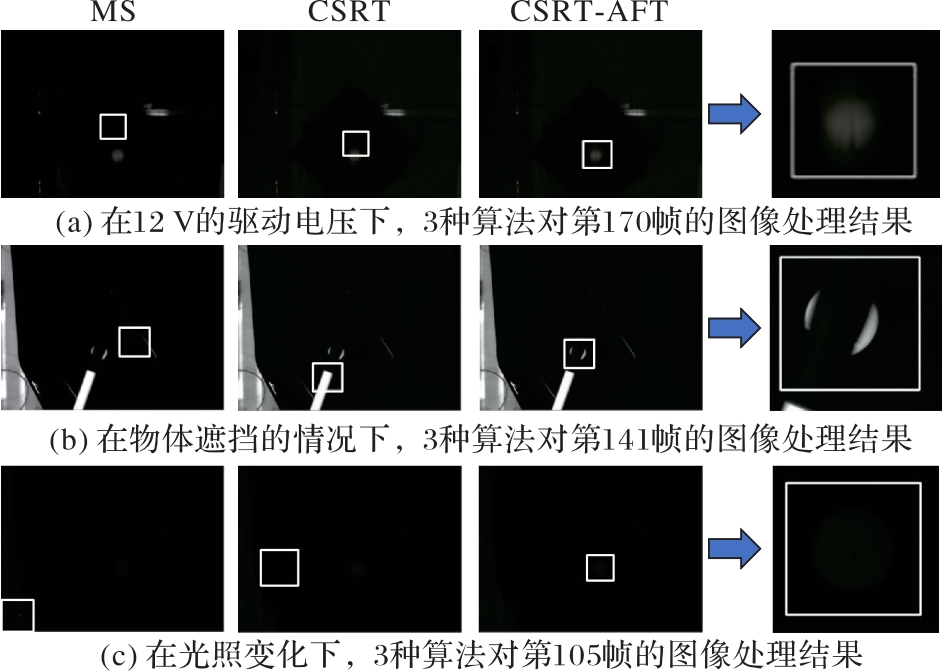
图6 3种条件下不同算法的处理结果
Fig. 6 Processing results of different algorithms under three conditions
| 测试条件 | 算法 | IoU | CE | PR/% |
|---|---|---|---|---|
| 动态模糊 | MeanShift | 0.64 | 3.23 | 64.5 |
| CSRT | 0.84 | 2.69 | 84.4 | |
| CSRT-AFT | 0.99 | 2.27 | 100.0 | |
| 光照变化 | MeanShift | 0.77 | 3.17 | 78.6 |
| CSRT | 0.86 | 2.94 | 87.9 | |
| CSRT-AFT | 0.98 | 2.58 | 100.0 | |
| 物体遮挡 | MeanShift | 0.55 | 5.39 | 55.9 |
| CSRT | 0.65 | 5.08 | 69.7 | |
| CSRT-AFT | 0.93 | 3.55 | 95.0 |
表1 算法的精度
Tab. 1 Accuracy of algorithms
| 测试条件 | 算法 | IoU | CE | PR/% |
|---|---|---|---|---|
| 动态模糊 | MeanShift | 0.64 | 3.23 | 64.5 |
| CSRT | 0.84 | 2.69 | 84.4 | |
| CSRT-AFT | 0.99 | 2.27 | 100.0 | |
| 光照变化 | MeanShift | 0.77 | 3.17 | 78.6 |
| CSRT | 0.86 | 2.94 | 87.9 | |
| CSRT-AFT | 0.98 | 2.58 | 100.0 | |
| 物体遮挡 | MeanShift | 0.55 | 5.39 | 55.9 |
| CSRT | 0.65 | 5.08 | 69.7 | |
| CSRT-AFT | 0.93 | 3.55 | 95.0 |
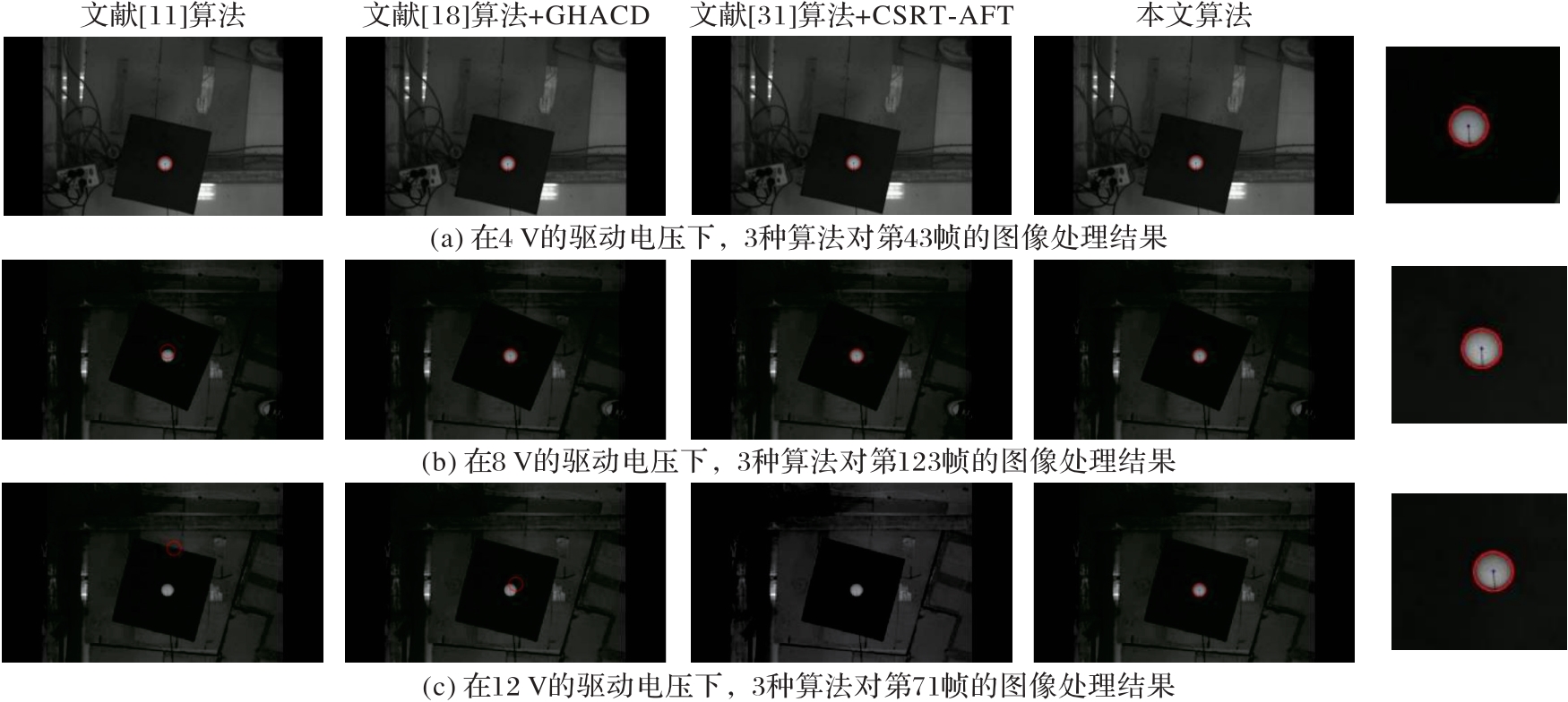
图7 在4 V、8 V和12 V,3种驱动电压下的处理结果
Fig. 7 Processing results at driving voltages of 4 V, 8 V, and 12 V
| 驱动电压/V | 算法 | |||
|---|---|---|---|---|
| 4 | 文献[ | 0.97 | 0.96 | 0.97 |
| 文献[ | 0.98 | 0.97 | 0.98 | |
| 文献[ | 0.95 | 0.94 | 0.95 | |
| 本文算法 | 0.98 | 0.97 | 0.98 | |
| 8 | 文献[ | 0.56 | 0.41 | 0.46 |
| 文献[ | 0.80 | 0.74 | 0.77 | |
| 文献[ | 0.85 | 0.78 | 0.81 | |
| 本文算法 | 0.96 | 0.95 | 0.96 | |
| 12 | 文献[ | 0.22 | 0.18 | 0.18 |
| 文献[ | 0.75 | 0.67 | 0.71 | |
| 文献[ | 0.70 | 0.65 | 0.67 | |
| 本文算法 | 0.94 | 0.95 | 0.94 |
表2 检测算法的平均性能
Tab. 2 Average performance of detection algorithms
| 驱动电压/V | 算法 | |||
|---|---|---|---|---|
| 4 | 文献[ | 0.97 | 0.96 | 0.97 |
| 文献[ | 0.98 | 0.97 | 0.98 | |
| 文献[ | 0.95 | 0.94 | 0.95 | |
| 本文算法 | 0.98 | 0.97 | 0.98 | |
| 8 | 文献[ | 0.56 | 0.41 | 0.46 |
| 文献[ | 0.80 | 0.74 | 0.77 | |
| 文献[ | 0.85 | 0.78 | 0.81 | |
| 本文算法 | 0.96 | 0.95 | 0.96 | |
| 12 | 文献[ | 0.22 | 0.18 | 0.18 |
| 文献[ | 0.75 | 0.67 | 0.71 | |
| 文献[ | 0.70 | 0.65 | 0.67 | |
| 本文算法 | 0.94 | 0.95 | 0.94 |
| 算法 | 平均时间 |
|---|---|
| 文献[ | 31.239 |
| 文献[ | 27.234 |
| 文献[ | 52.345 |
| 本文算法 | 5.452 |
表3 检测算法的平均处理时间 (ms)
Tab. 3 Average processing time of detection algorithms
| 算法 | 平均时间 |
|---|---|
| 文献[ | 31.239 |
| 文献[ | 27.234 |
| 文献[ | 52.345 |
| 本文算法 | 5.452 |
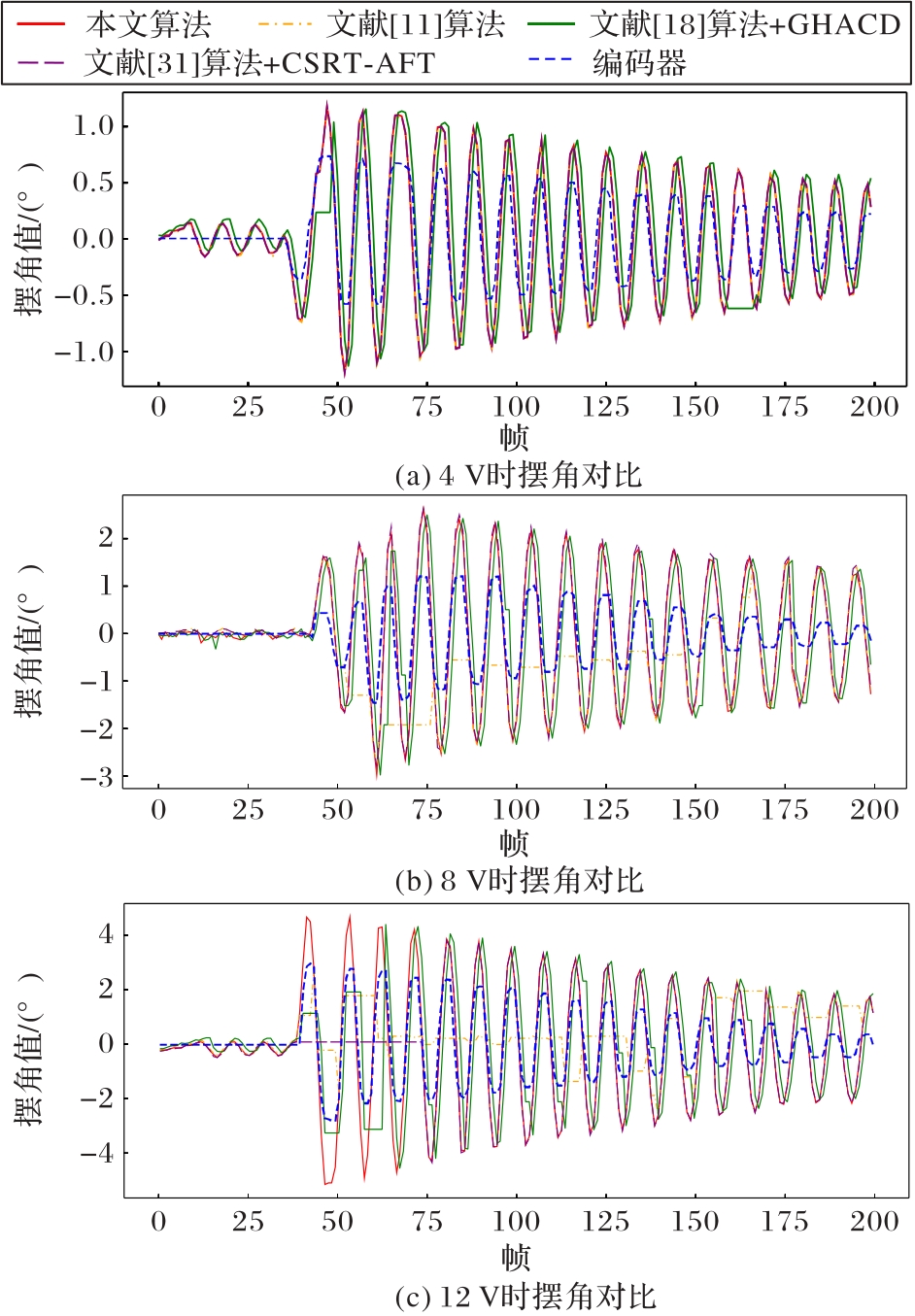
图8 不同算法摆角检测结果的对比
Fig. 8 Comparison of swing angle detection results using different algorithms
| [1] | PRICE L C, CHEN J, PARK J, et al. Multisensor-driven real-time crane monitoring system for blind lift operations: lessons learned from a case study[J]. Automation in Construction, 2021, 124: No.103552. |
| [2] | SATO K, OHISHI K, MIYAZAKI T. Anti‐sway crane control considering wind disturbance and container mass[J]. Electrical Engineering in Japan, 2015, 193(1): 21-32. |
| [3] | TUAN L A, KIM J J, LEE S G, et al. Second-order sliding mode control of a 3D overhead crane with uncertain system parameters[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(5): 811-819. |
| [4] | 韩瑞泽,冯伟,郭青,等. 视频单目标跟踪研究进展综述[J]. 计算机学报, 2022, 45(9): 1877-1907. |
| HAN R Z, FENG W, GUO Q, et al. Single object tracking research: a survey[J]. Chinese Journal of Computers, 2022, 45(9): 1877-1907. | |
| [5] | 许鹏,方勇纯,陈鹤. 基于背景建模的桥式吊车负载摆角测量算法[J]. 控制工程, 2019, 26(9): 1613-1619. |
| XU P, FANG Y C, CHEN H. Background modeling based payload swing angle measuring method of bridge crane system[J]. Control Engineering of China, 2019, 26(9): 1613-1619. | |
| [6] | GROSINGER P, RYBÁŘ J, DUNAJ Š, et al. A new payload swing angle sensing device and its accuracy[J]. Sensors, 2021, 21(19): No.6612. |
| [7] | REN H, WANG Q H, XING Y, et al. Super-multiview integral imaging scheme based on sparse camera array and CNN super-resolution[J]. Applied Optics, 2019, 58(5): A190-A196. |
| [8] | WANG J, ZHANG Q, YANG B, et al. Vision-based automated recognition and 3D localization framework for tower cranes using far-field cameras[J]. Sensors, 2023, 23(10): No.4851. |
| [9] | 黄鹤,吴琨,李昕芮,等. 自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法[J]. 上海交通大学学报, 2022, 56(2): 143-155. |
| HUANG H, WU K, LI X R, et al. A multi-feature particle filter vehicle tracking algorithm based on adaptive interpolation moth-flame optimization[J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 143-155. | |
| [10] | 杨一帆,田雁,杨帆,等. 基于改进Mean-Shift算法的红外小目标跟踪[J]. 红外与激光工程, 2014, 43(7): 2164-2169. |
| YANG Y F, TIAN Y, YANG F, et al. Tracking of infrared small-target based on improved Mean-Shift algorithm[J]. Infrared and Laser Engineering, 2014, 43(7): 2164-2169. | |
| [11] | HUANG J, XU W, ZHAO W, et al. An improved method for swing measurement based on monocular vision to the payload of overhead crane[J]. Transactions of the Institute of Measurement and Control, 2020, 44(1): 50-59. |
| [12] | WEI J, LIU J, TANG J, et al. Synthetic velocity measurement algorithm of monocular vision based on square-root cubature Kalman filter[J]. Review of Scientific Instruments, 2022, 93(1): No.015004. |
| [13] | WANG S, XU S, MA Z, et al. A systematic solution for moving-target detection and tracking while only using a monocular camera[J]. Sensors, 2023, 23(10): No.4862. |
| [14] | MASOUMIAN A, MAREI D G F, ABDULWAHAB S, et al. Absolute distance prediction based on deep learning object detection and monocular depth estimation models[C]// Proceedings of the 23rd International Conference of the Catalan Association for Artificial Intelligence. Amsterdam: IOS Press, 2021: 325-334. |
| [15] | 李成美,白宏阳,郭宏伟,等. 一种改进光流法的运动目标检测及跟踪算法[J]. 仪器仪表学报, 2018, 39(5): 249-256. |
| LI C M, BAI H Y, GUO H W, et al. Moving object detection and tracking algorithm based on improved optical flow method[J]. Chinese Journal of Scientific Instrument, 2018, 39(5): 249-256. | |
| [16] | YANG H, GAO S, WU X, et al. Online multi-object tracking using KCF-based single-object tracker with occlusion analysis[J]. Multimedia Systems, 2020, 26(6): 655-669. |
| [17] | 杜静,徐为民. 基于改进核相关滤波的桥吊负载摆角实时检测方法[J]. 上海海事大学学报, 2024, 45(3): 109-118. |
| DU J, XU W M. Real-time detection method of bridge crane load swing angle based on improved kernel correlation filter[J]. Journal of Shanghai Maritime University, 2024, 45(3): 109-118. | |
| [18] | ZHANG Y, XING M, ZHANG J, et al. Robust multi-ship tracker in SAR imagery by fusing feature matching and modified KCF[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: No.4004105. |
| [19] | LUKEŽIČ A, VOJÍŘ T, ČEHOVIN ZAJC L, et al. Discriminative correlation filter with channel and spatial reliability[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4847-4856. |
| [20] | LUNEŽIČ A, VOJÍŘ T, ČEHOVIN ZAJC L, et al. Discriminative correlation filter tracker with channel and spatial reliability[J]. International Journal of Computer Vision, 2018, 126(7): 671-688. |
| [21] | FARKHODOV K, LEE S H, KWON K R. Object tracking using CSRT Tracker and RCNN[C]// Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies. Setúbal: SciTePress, 2020: 209-212. |
| [22] | 刘建国,徐为民. 基于单目视觉实时测量桥式起重机负载摆角[J]. 上海海事大学学报, 2024, 45(2): 111-118. |
| LIU J G, XU W M. Monocular vision-based real-time measurement on overhead crane payload swing angle[J]. Journal of Shanghai Maritime University, 2024, 45(2): 111-118. | |
| [23] | UKE N, FUTANE P, DESHPANDE N, et al. A review on deep learning-based object tracking methods[J]. Multiagent and Grid Systems, 2024, 20(1): 27-39. |
| [24] | KHODARAHMI M, MAIHAMI V. A review on Kalman filter models[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 727-747. |
| [25] | SUN C, WU X, SUN J, et al. Multi-stage refinement feature matching using adaptive ORB features for robotic vision navigation[J]. IEEE Sensors Journal, 2022, 22(3): 2603-2617. |
| [26] | LI C, LI X, LI T, et al. LMedS-based power regression: an optimal and automatic method of radiometric intercalibration for DMSP-OLS NTL imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 2046-2057. |
| [27] | KARRAS C, KARRAS A, AVLONITIS M, et al. An overview of MCMC methods: from theory to applications[C]// Proceedings of International Workshops of the 2022 IFIP International Conference on Artificial Intelligence Applications and Innovations, IFIPAICT 652. Cham: Springer, 2022: 319-332. |
| [28] | LI Z, SHAN J. RANSAC-based multi primitive building reconstruction from 3D point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 185: 247-260. |
| [29] | BAKUROV I, BUZZELLI M, SCHETTINI R, et al. Structural Similarity Index (SSIM) revisited: a data-driven approach[J]. Expert Systems with Applications, 2022, 189: No.116087. |
| [30] | LEVIN A A, KLIMOV D D, NECHUNAEV A A, et al. Assessment of experimental OpenCV tracking algorithms for ultrasound videos[J]. Scientific Reports, 2023, 13: No.6765. |
| [31] | LAN X, DENG H, LI Y, et al. A fast circle detection algorithm based on circular arc feature screening[J]. Symmetry, 2023, 15(3): No.734. |
| [1] | 郭伟, 王曼婷, 曲海成. 基于多尺度感知的多维空间融合水下图像增强算法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 224-232. |
| [2] | 谢劲, 褚苏荣, 强彦, 赵涓涓, 张华, 高勇. 用于胸片中硬负样本识别的双支分布一致性对比学习模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2369-2377. |
| [3] | 黄靖, 彭鑫, 李文豪, 胡凯, 王腾, 黄亚敏, 文元桥. 多尺度特征融合的高质量声呐图像生成方法[J]. 《计算机应用》唯一官方网站, 2025, 45(12): 3987-3994. |
| [4] | 车文博, 王建华, 郑翔, 吴恭兴, 张舜, 王浩铸. 地下封闭水体内多无人艇协同的视觉定位方法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 325-336. |
| [5] | 徐航, 杨智, 陈性元, 韩冰, 杜学绘. 基于自适应敏感区域变异的覆盖引导模糊测试[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2528-2535. |
| [6] | 刘源泂, 何茂征, 黄益斌, 钱程. 基于ResNet50和改进注意力机制的船舶识别模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1935-1941. |
| [7] | 曾蠡, 杨婧如, 黄罡, 景翔, 罗超然. 超图应用方法综述:问题、进展与挑战[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3315-3326. |
| [8] | 路琨婷, 费蓉蓉, 张选德. 融合卷积神经网络的遥感图像全色锐化[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2963-2969. |
| [9] | 杨君宇, 董岩, 龙镇南, 杨新, 韩斌. 基于事件相机的雨滴检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2904-2909. |
| [10] | 赵元龙, 单玉刚, 袁杰, 赵康迪. 基于实例分割与毕达哥拉斯模糊决策的目标跟踪[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1930-1937. |
| [11] | 池月, 李正平, 徐超, 冯博. 医用内窥镜图像的高光移除算法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1278-1283. |
| [12] | 郭克友, 李雪, 杨民. 基于轻量化YOLOv4的交通信息实时检测方法[J]. 《计算机应用》唯一官方网站, 2023, 43(1): 74-80. |
| [13] | 潘高峰, 樊渊, 汝玉, 郭予超. 基于点线特征融合的低纹理单目视觉同时定位与地图构建算法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2170-2176. |
| [14] | 赵建敏, 赵成, 夏海光. 基于Kinect v4的牛体尺测量方法[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1598-1606. |
| [15] | 李海丰, 赵碧帆, 侯谨毅, 王怀超, 桂仲成. 基于自适应双阈值的地下目标自动检测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(4): 1275-1283. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||