


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (2): 666-675.DOI: 10.11772/j.issn.1001-9081.2025030298
• Frontier and comprehensive applications • Previous Articles
Received:2025-03-25
Revised:2025-05-09
Accepted:2025-05-12
Online:2025-05-26
Published:2026-02-10
Contact:
Weimin XU
About author:HUA Weixiang, born in 1998, M. S. candidate. His research interests include real-time visual detection, image processing.Supported by:
花伟祥, 徐为民( )
)
通讯作者:
徐为民
作者简介:花伟祥(1998—),男,安徽宿州人,硕士研究生,主要研究方向:实时视觉检测、图像处理基金资助:CLC Number:
Weixiang HUA, Weimin XU. Adaptive tracking and gradient circle detection method for load swing angle of bridge crane[J]. Journal of Computer Applications, 2026, 46(2): 666-675.
花伟祥, 徐为民. 桥式起重机负载摆角自适应跟踪与梯度圆检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 666-675.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025030298
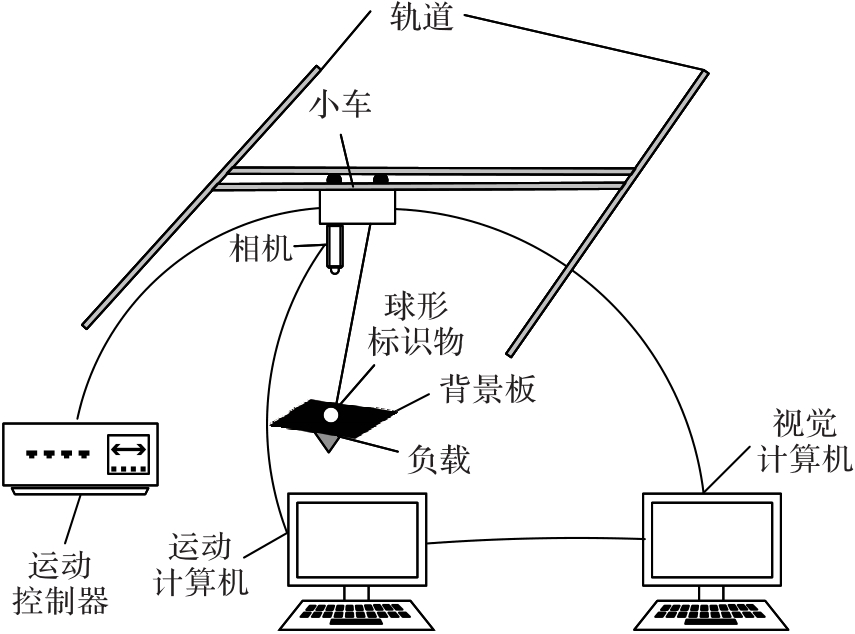
Fig. 1 Bridge crane load swing angle detection system
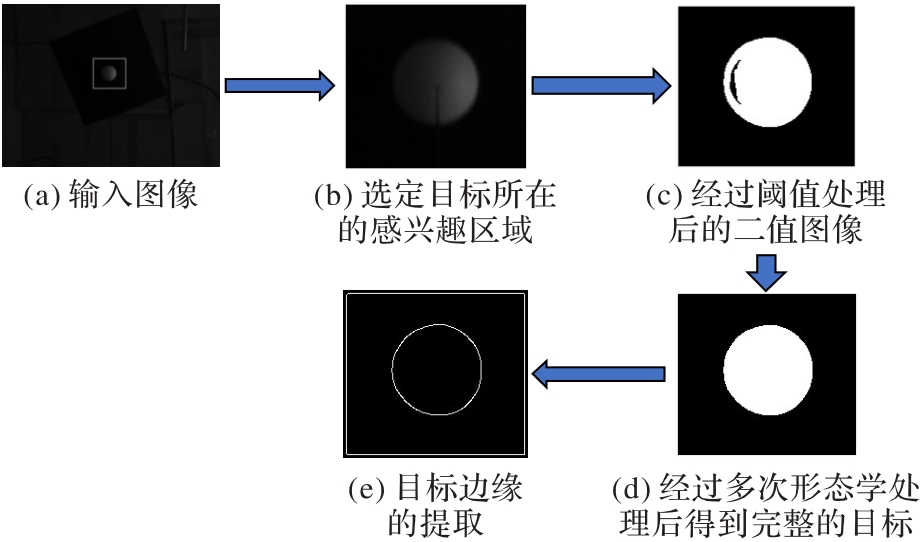
Fig. 2 Target preprocessing process
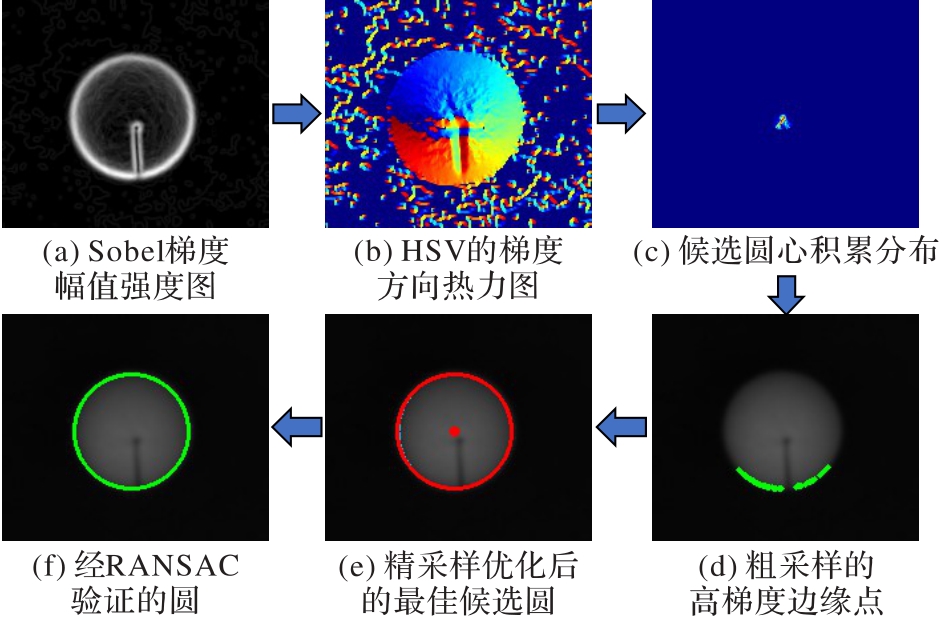
Fig. 3 Circle detection process
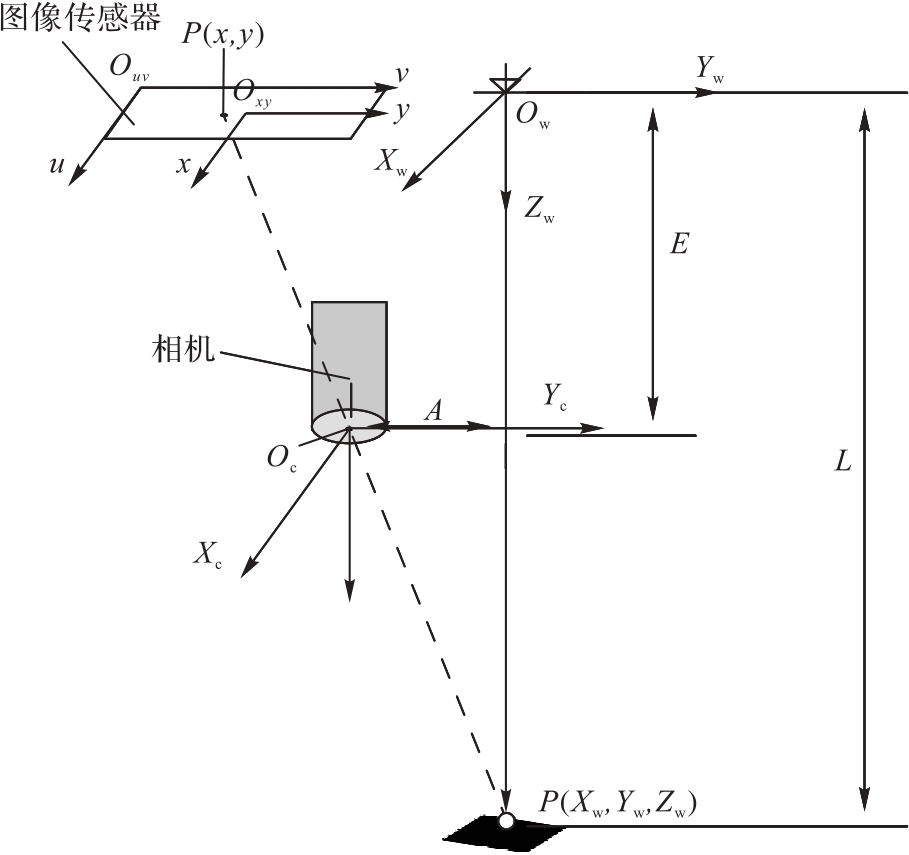
Fig. 4 Geometric relationship between camera and load

Fig. 5 Vision experimental platform of bridge crane
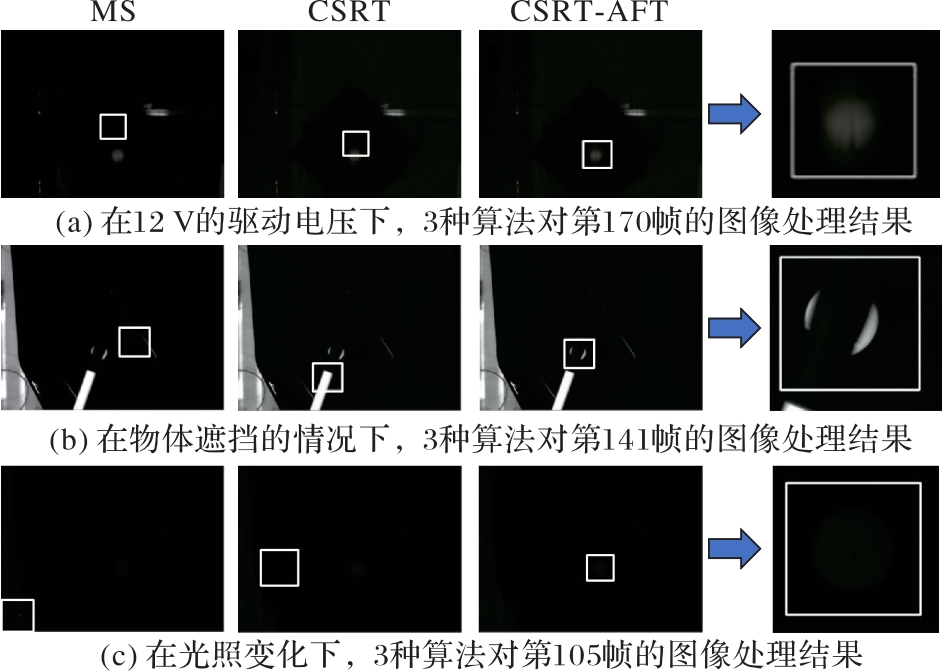
Fig. 6 Processing results of different algorithms under three conditions
| 测试条件 | 算法 | IoU | CE | PR/% |
|---|---|---|---|---|
| 动态模糊 | MeanShift | 0.64 | 3.23 | 64.5 |
| CSRT | 0.84 | 2.69 | 84.4 | |
| CSRT-AFT | 0.99 | 2.27 | 100.0 | |
| 光照变化 | MeanShift | 0.77 | 3.17 | 78.6 |
| CSRT | 0.86 | 2.94 | 87.9 | |
| CSRT-AFT | 0.98 | 2.58 | 100.0 | |
| 物体遮挡 | MeanShift | 0.55 | 5.39 | 55.9 |
| CSRT | 0.65 | 5.08 | 69.7 | |
| CSRT-AFT | 0.93 | 3.55 | 95.0 |
Tab. 1 Accuracy of algorithms
| 测试条件 | 算法 | IoU | CE | PR/% |
|---|---|---|---|---|
| 动态模糊 | MeanShift | 0.64 | 3.23 | 64.5 |
| CSRT | 0.84 | 2.69 | 84.4 | |
| CSRT-AFT | 0.99 | 2.27 | 100.0 | |
| 光照变化 | MeanShift | 0.77 | 3.17 | 78.6 |
| CSRT | 0.86 | 2.94 | 87.9 | |
| CSRT-AFT | 0.98 | 2.58 | 100.0 | |
| 物体遮挡 | MeanShift | 0.55 | 5.39 | 55.9 |
| CSRT | 0.65 | 5.08 | 69.7 | |
| CSRT-AFT | 0.93 | 3.55 | 95.0 |
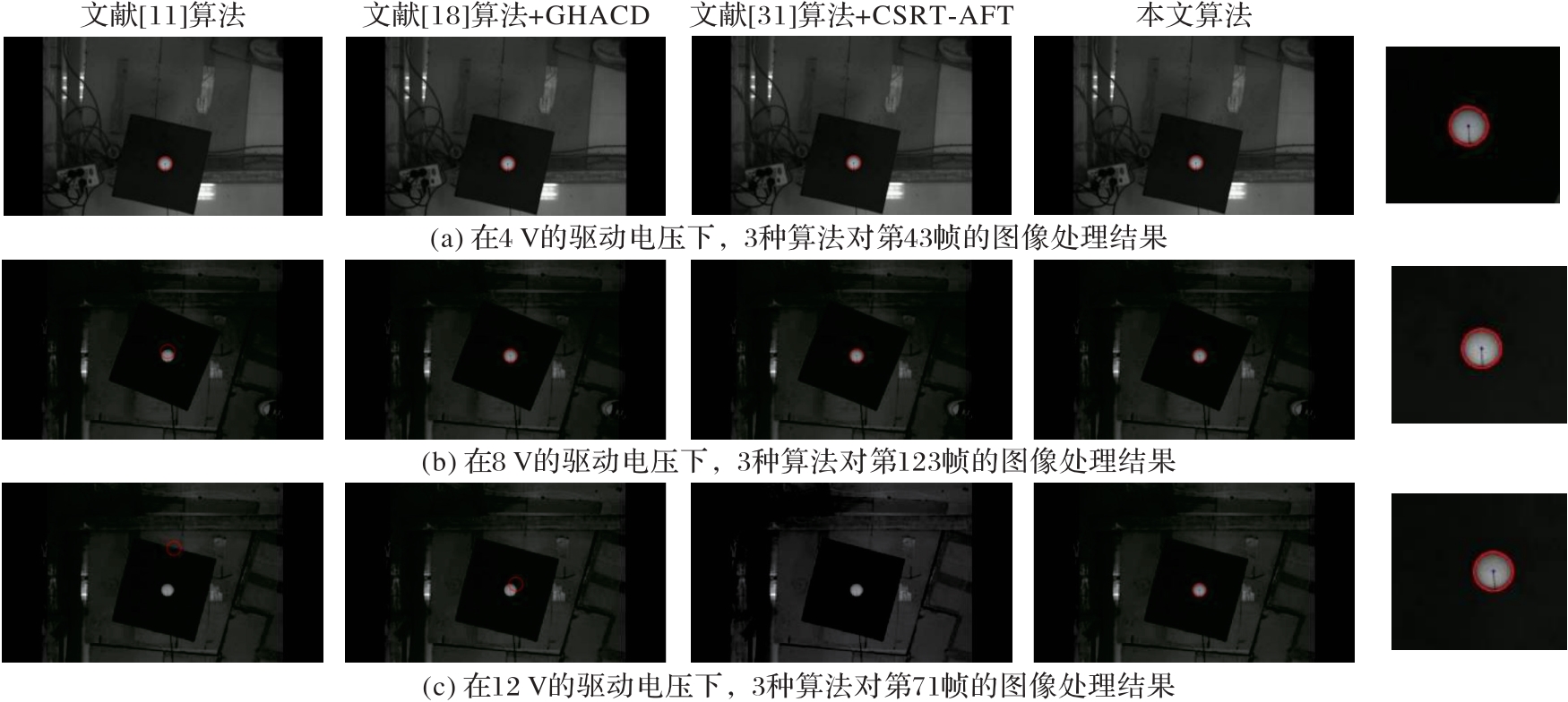
Fig. 7 Processing results at driving voltages of 4 V, 8 V, and 12 V
| 驱动电压/V | 算法 | |||
|---|---|---|---|---|
| 4 | 文献[ | 0.97 | 0.96 | 0.97 |
| 文献[ | 0.98 | 0.97 | 0.98 | |
| 文献[ | 0.95 | 0.94 | 0.95 | |
| 本文算法 | 0.98 | 0.97 | 0.98 | |
| 8 | 文献[ | 0.56 | 0.41 | 0.46 |
| 文献[ | 0.80 | 0.74 | 0.77 | |
| 文献[ | 0.85 | 0.78 | 0.81 | |
| 本文算法 | 0.96 | 0.95 | 0.96 | |
| 12 | 文献[ | 0.22 | 0.18 | 0.18 |
| 文献[ | 0.75 | 0.67 | 0.71 | |
| 文献[ | 0.70 | 0.65 | 0.67 | |
| 本文算法 | 0.94 | 0.95 | 0.94 |
Tab. 2 Average performance of detection algorithms
| 驱动电压/V | 算法 | |||
|---|---|---|---|---|
| 4 | 文献[ | 0.97 | 0.96 | 0.97 |
| 文献[ | 0.98 | 0.97 | 0.98 | |
| 文献[ | 0.95 | 0.94 | 0.95 | |
| 本文算法 | 0.98 | 0.97 | 0.98 | |
| 8 | 文献[ | 0.56 | 0.41 | 0.46 |
| 文献[ | 0.80 | 0.74 | 0.77 | |
| 文献[ | 0.85 | 0.78 | 0.81 | |
| 本文算法 | 0.96 | 0.95 | 0.96 | |
| 12 | 文献[ | 0.22 | 0.18 | 0.18 |
| 文献[ | 0.75 | 0.67 | 0.71 | |
| 文献[ | 0.70 | 0.65 | 0.67 | |
| 本文算法 | 0.94 | 0.95 | 0.94 |
| 算法 | 平均时间 |
|---|---|
| 文献[ | 31.239 |
| 文献[ | 27.234 |
| 文献[ | 52.345 |
| 本文算法 | 5.452 |
Tab. 3 Average processing time of detection algorithms
| 算法 | 平均时间 |
|---|---|
| 文献[ | 31.239 |
| 文献[ | 27.234 |
| 文献[ | 52.345 |
| 本文算法 | 5.452 |
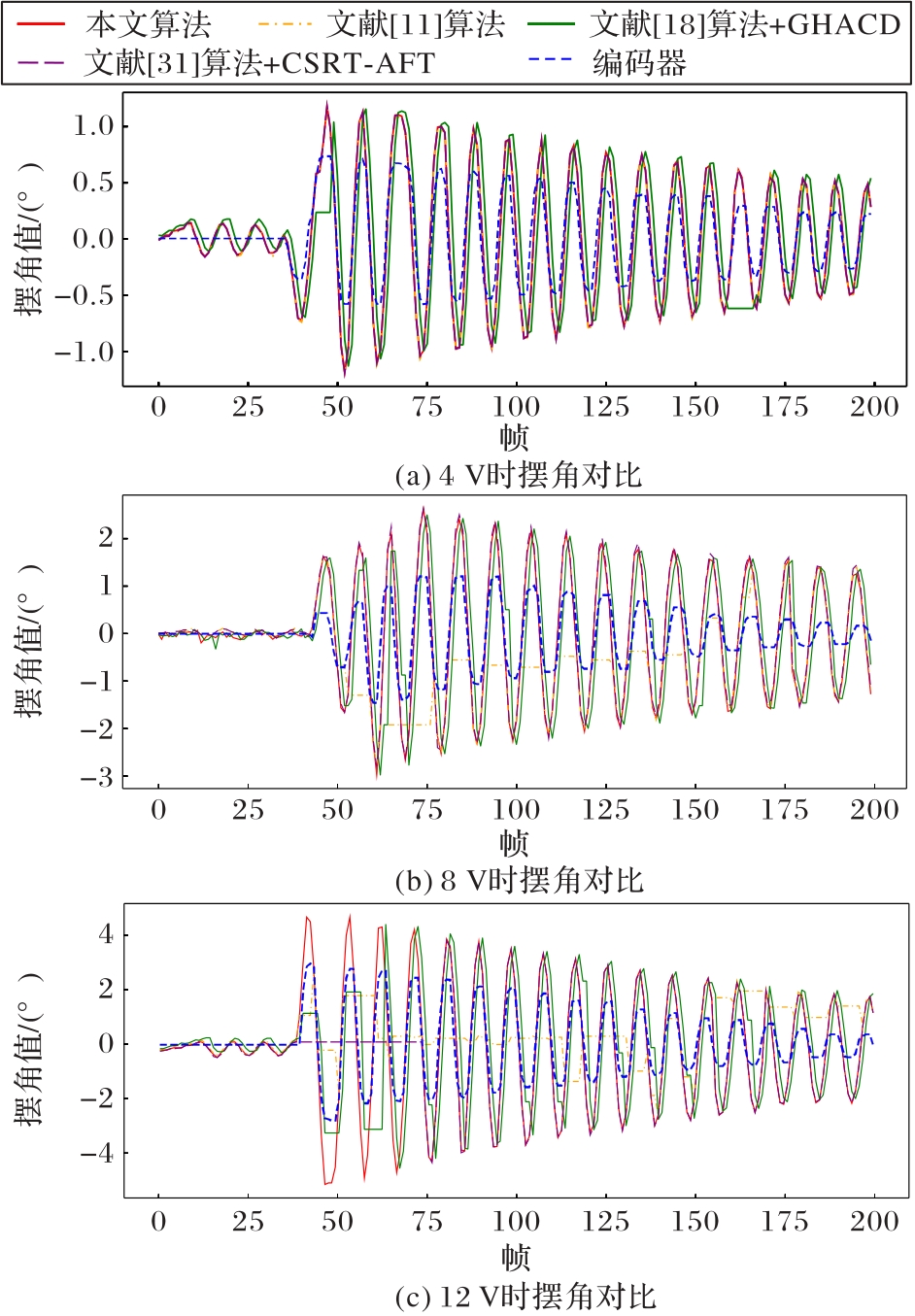
Fig. 8 Comparison of swing angle detection results using different algorithms
| [1] | PRICE L C, CHEN J, PARK J, et al. Multisensor-driven real-time crane monitoring system for blind lift operations: lessons learned from a case study[J]. Automation in Construction, 2021, 124: No.103552. |
| [2] | SATO K, OHISHI K, MIYAZAKI T. Anti‐sway crane control considering wind disturbance and container mass[J]. Electrical Engineering in Japan, 2015, 193(1): 21-32. |
| [3] | TUAN L A, KIM J J, LEE S G, et al. Second-order sliding mode control of a 3D overhead crane with uncertain system parameters[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(5): 811-819. |
| [4] | 韩瑞泽,冯伟,郭青,等. 视频单目标跟踪研究进展综述[J]. 计算机学报, 2022, 45(9): 1877-1907. |
| HAN R Z, FENG W, GUO Q, et al. Single object tracking research: a survey[J]. Chinese Journal of Computers, 2022, 45(9): 1877-1907. | |
| [5] | 许鹏,方勇纯,陈鹤. 基于背景建模的桥式吊车负载摆角测量算法[J]. 控制工程, 2019, 26(9): 1613-1619. |
| XU P, FANG Y C, CHEN H. Background modeling based payload swing angle measuring method of bridge crane system[J]. Control Engineering of China, 2019, 26(9): 1613-1619. | |
| [6] | GROSINGER P, RYBÁŘ J, DUNAJ Š, et al. A new payload swing angle sensing device and its accuracy[J]. Sensors, 2021, 21(19): No.6612. |
| [7] | REN H, WANG Q H, XING Y, et al. Super-multiview integral imaging scheme based on sparse camera array and CNN super-resolution[J]. Applied Optics, 2019, 58(5): A190-A196. |
| [8] | WANG J, ZHANG Q, YANG B, et al. Vision-based automated recognition and 3D localization framework for tower cranes using far-field cameras[J]. Sensors, 2023, 23(10): No.4851. |
| [9] | 黄鹤,吴琨,李昕芮,等. 自适应插值飞蛾扑火优化的多特征粒子滤波车辆跟踪算法[J]. 上海交通大学学报, 2022, 56(2): 143-155. |
| HUANG H, WU K, LI X R, et al. A multi-feature particle filter vehicle tracking algorithm based on adaptive interpolation moth-flame optimization[J]. Journal of Shanghai Jiao Tong University, 2022, 56(2): 143-155. | |
| [10] | 杨一帆,田雁,杨帆,等. 基于改进Mean-Shift算法的红外小目标跟踪[J]. 红外与激光工程, 2014, 43(7): 2164-2169. |
| YANG Y F, TIAN Y, YANG F, et al. Tracking of infrared small-target based on improved Mean-Shift algorithm[J]. Infrared and Laser Engineering, 2014, 43(7): 2164-2169. | |
| [11] | HUANG J, XU W, ZHAO W, et al. An improved method for swing measurement based on monocular vision to the payload of overhead crane[J]. Transactions of the Institute of Measurement and Control, 2020, 44(1): 50-59. |
| [12] | WEI J, LIU J, TANG J, et al. Synthetic velocity measurement algorithm of monocular vision based on square-root cubature Kalman filter[J]. Review of Scientific Instruments, 2022, 93(1): No.015004. |
| [13] | WANG S, XU S, MA Z, et al. A systematic solution for moving-target detection and tracking while only using a monocular camera[J]. Sensors, 2023, 23(10): No.4862. |
| [14] | MASOUMIAN A, MAREI D G F, ABDULWAHAB S, et al. Absolute distance prediction based on deep learning object detection and monocular depth estimation models[C]// Proceedings of the 23rd International Conference of the Catalan Association for Artificial Intelligence. Amsterdam: IOS Press, 2021: 325-334. |
| [15] | 李成美,白宏阳,郭宏伟,等. 一种改进光流法的运动目标检测及跟踪算法[J]. 仪器仪表学报, 2018, 39(5): 249-256. |
| LI C M, BAI H Y, GUO H W, et al. Moving object detection and tracking algorithm based on improved optical flow method[J]. Chinese Journal of Scientific Instrument, 2018, 39(5): 249-256. | |
| [16] | YANG H, GAO S, WU X, et al. Online multi-object tracking using KCF-based single-object tracker with occlusion analysis[J]. Multimedia Systems, 2020, 26(6): 655-669. |
| [17] | 杜静,徐为民. 基于改进核相关滤波的桥吊负载摆角实时检测方法[J]. 上海海事大学学报, 2024, 45(3): 109-118. |
| DU J, XU W M. Real-time detection method of bridge crane load swing angle based on improved kernel correlation filter[J]. Journal of Shanghai Maritime University, 2024, 45(3): 109-118. | |
| [18] | ZHANG Y, XING M, ZHANG J, et al. Robust multi-ship tracker in SAR imagery by fusing feature matching and modified KCF[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: No.4004105. |
| [19] | LUKEŽIČ A, VOJÍŘ T, ČEHOVIN ZAJC L, et al. Discriminative correlation filter with channel and spatial reliability[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4847-4856. |
| [20] | LUNEŽIČ A, VOJÍŘ T, ČEHOVIN ZAJC L, et al. Discriminative correlation filter tracker with channel and spatial reliability[J]. International Journal of Computer Vision, 2018, 126(7): 671-688. |
| [21] | FARKHODOV K, LEE S H, KWON K R. Object tracking using CSRT Tracker and RCNN[C]// Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies. Setúbal: SciTePress, 2020: 209-212. |
| [22] | 刘建国,徐为民. 基于单目视觉实时测量桥式起重机负载摆角[J]. 上海海事大学学报, 2024, 45(2): 111-118. |
| LIU J G, XU W M. Monocular vision-based real-time measurement on overhead crane payload swing angle[J]. Journal of Shanghai Maritime University, 2024, 45(2): 111-118. | |
| [23] | UKE N, FUTANE P, DESHPANDE N, et al. A review on deep learning-based object tracking methods[J]. Multiagent and Grid Systems, 2024, 20(1): 27-39. |
| [24] | KHODARAHMI M, MAIHAMI V. A review on Kalman filter models[J]. Archives of Computational Methods in Engineering, 2023, 30(1): 727-747. |
| [25] | SUN C, WU X, SUN J, et al. Multi-stage refinement feature matching using adaptive ORB features for robotic vision navigation[J]. IEEE Sensors Journal, 2022, 22(3): 2603-2617. |
| [26] | LI C, LI X, LI T, et al. LMedS-based power regression: an optimal and automatic method of radiometric intercalibration for DMSP-OLS NTL imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 2046-2057. |
| [27] | KARRAS C, KARRAS A, AVLONITIS M, et al. An overview of MCMC methods: from theory to applications[C]// Proceedings of International Workshops of the 2022 IFIP International Conference on Artificial Intelligence Applications and Innovations, IFIPAICT 652. Cham: Springer, 2022: 319-332. |
| [28] | LI Z, SHAN J. RANSAC-based multi primitive building reconstruction from 3D point clouds[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 185: 247-260. |
| [29] | BAKUROV I, BUZZELLI M, SCHETTINI R, et al. Structural Similarity Index (SSIM) revisited: a data-driven approach[J]. Expert Systems with Applications, 2022, 189: No.116087. |
| [30] | LEVIN A A, KLIMOV D D, NECHUNAEV A A, et al. Assessment of experimental OpenCV tracking algorithms for ultrasound videos[J]. Scientific Reports, 2023, 13: No.6765. |
| [31] | LAN X, DENG H, LI Y, et al. A fast circle detection algorithm based on circular arc feature screening[J]. Symmetry, 2023, 15(3): No.734. |
| [1] | Wei GUO, Manting WANG, Haicheng QU. Underwater image enhancement algorithm based on multi-scale perception and multi-dimensional space fusion [J]. Journal of Computer Applications, 2026, 46(1): 224-232. |
| [2] | Jin XIE, Surong CHU, Yan QIANG, Juanjuan ZHAO, Hua ZHANG, Yong GAO. Dual-branch distribution consistency contrastive learning model for hard negative sample identification in chest X-rays [J]. Journal of Computer Applications, 2025, 45(7): 2369-2377. |
| [3] | Jing HUANG, Xin PENG, Wenhao LI, Kai HU, Teng WANG, Yamin HUANG, Yuanqiao WEN. High-quality sonar image generation method based on multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(12): 3987-3994. |
| [4] | Wenbo CHE, Jianhua WANG, Xiang ZHENG, Gongxing WU, Shun ZHANG, Haozhu WANG. Cooperative visual positioning method of multiple unmanned surface vehicles in subterranean closed water body [J]. Journal of Computer Applications, 2025, 45(1): 325-336. |
| [5] | Hang XU, Zhi YANG, Xingyuan CHEN, Bing HAN, Xuehui DU. Coverage-guided fuzzing based on adaptive sensitive region mutation [J]. Journal of Computer Applications, 2024, 44(8): 2528-2535. |
| [6] | Yuanjiong LIU, Maozheng HE, Yibin HUANG, Cheng QIAN. Ship identification model based on ResNet50 and improved attention mechanism [J]. Journal of Computer Applications, 2024, 44(6): 1935-1941. |
| [7] | Li ZENG, Jingru YANG, Gang HUANG, Xiang JING, Chaoran LUO. Survey on hypergraph application methods: issues, advances, and challenges [J]. Journal of Computer Applications, 2024, 44(11): 3315-3326. |
| [8] | Junyu YANG, Yan DONG, Zhennan LONG, Xin YANG, Bin HAN. Rain detection algorithm based on event camera [J]. Journal of Computer Applications, 2023, 43(9): 2904-2909. |
| [9] | Kunting LU, Rongrong FEI, Xuande ZHANG. Remote sensing image pansharpening by convolutional neural network [J]. Journal of Computer Applications, 2023, 43(9): 2963-2969. |
| [10] | Yuanlong ZHAO, Yugang SHAN, Jie YUAN, Kangdi ZHAO. Object tracking based on instance segmentation and Pythagorean fuzzy decision-making [J]. Journal of Computer Applications, 2023, 43(6): 1930-1937. |
| [11] | Yue CHI, Zhengping LI, Chao XU, Bo FENG. Highlight removal algorithm for medical endoscopic images [J]. Journal of Computer Applications, 2023, 43(4): 1278-1283. |
| [12] | GUO Keyou, LI Xue, YANG Min. Real‑time detection method of traffic information based on lightweight YOLOv4 [J]. Journal of Computer Applications, 2023, 43(1): 74-80. |
| [13] | Gaofeng PAN, Yuan FAN, Yu RU, Yuchao GUO. Low-texture monocular visual simultaneous localization and mapping algorithm based on point-line feature fusion [J]. Journal of Computer Applications, 2022, 42(7): 2170-2176. |
| [14] | Jianmin ZHAO, Cheng ZHAO, Haiguang XIA. Cattle body size measurement method based on Kinect v4 [J]. Journal of Computer Applications, 2022, 42(5): 1598-1606. |
| [15] | Haifeng LI, Bifan ZHAO, Jinyi HOU, Huaichao WANG, Zhongcheng GUI. Automatic detection algorithm for underground target based on adaptive double threshold [J]. Journal of Computer Applications, 2022, 42(4): 1275-1283. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||