


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (10): 3302-3310.DOI: 10.11772/j.issn.1001-9081.2024091347
• 多媒体计算与计算机仿真 • 上一篇
杨建锋1,2, 陈斌2,3,4( ), 李雨轩1,2
), 李雨轩1,2
收稿日期:2024-09-23
修回日期:2024-12-21
接受日期:2024-12-23
发布日期:2025-01-14
出版日期:2025-10-10
通讯作者:
陈斌
作者简介:杨建锋(1998—),男,江西南昌人,硕士研究生,主要研究方向:机器视觉、异常检测
Jianfeng YANG1,2, Bin CHEN2,3,4(), Yuxuan LI1,2
Received:2024-09-23
Revised:2024-12-21
Accepted:2024-12-23
Online:2025-01-14
Published:2025-10-10
Contact:
Bin CHEN
About author:YANG Jianfeng, born in 1998, M. S. candidate. His research interests include machine vision, anomaly detection.摘要:
面对日趋复杂的工业生产环境,三维点云工业异常检测需求与日俱增。尽管基于预训练网络的二维异常检测方法效果显著,但三维点云预训练网络的泛化能力有限,导致这类点云异常检测方法的效果不佳。为提高三维点云异常检测的性能,提出一种基于点云重构的异常检测方法Point-ReAD(Point cloud Reconstruction for Anomaly Detection),它由异常模拟模块、点云重构网络和异常判别模块这3个核心模块构成。在训练阶段,正常点云图经异常模拟模块产生异常点云送入点云重构网络,正常点云作为自监督信号指导重构网络的学习;点云重构网络使用分组注意力模块(GAM),用于融合点云的复杂结构信息,从而有效地捕捉点云中的几何和语义特征。在推理阶段,测试点云进入重构网络后生成重构点云,使用异常判别模块比较重构前后的点云,从而精确定位异常。实验结果表明,Point-ReAD在MVTec 3D-AD数据集上的点云级AUROC(PC-AUROC)和点级AUPRO(Area Under the Per-Region Overlap)分别达到了95.49%和94.66%,相较于次优方法3DR?M(3D Discriminatively trained Reconstruction Anomaly Embedding Model)分别提升了0.89和1.27个百分点。
中图分类号:
杨建锋, 陈斌, 李雨轩. 基于点云重构的自监督点云异常检测方法[J]. 计算机应用, 2025, 45(10): 3302-3310.
Jianfeng YANG, Bin CHEN, Yuxuan LI. Self-supervised point cloud anomaly detection method based on point cloud reconstruction[J]. Journal of Computer Applications, 2025, 45(10): 3302-3310.
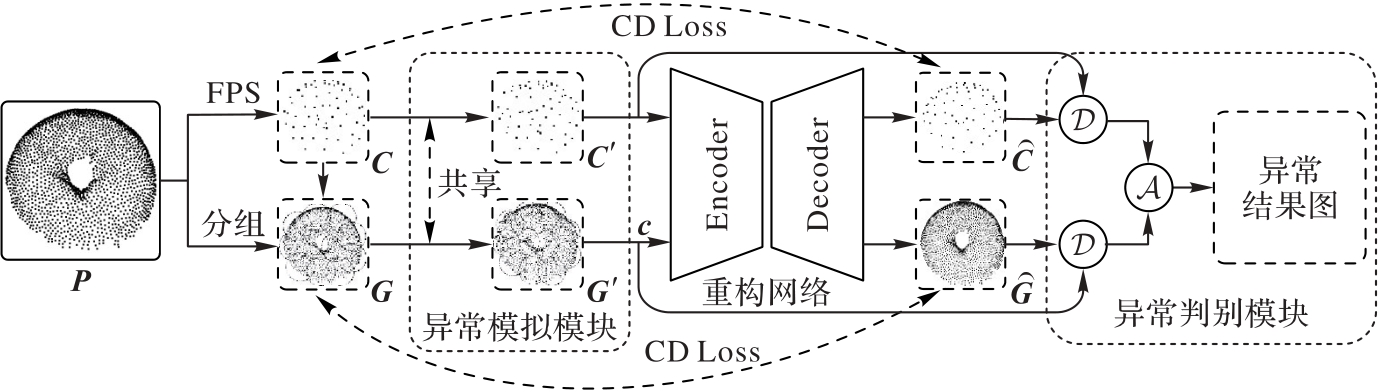
图1 Point-ReAD的整体架构
Fig. 1 Overall architecture of Point-ReAD
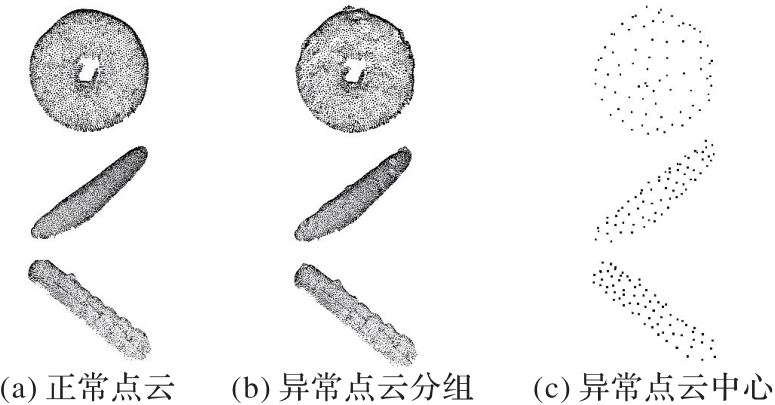
图2 点云异常模拟的可视化
Fig. 2 Visualization of point cloud anomaly simulation
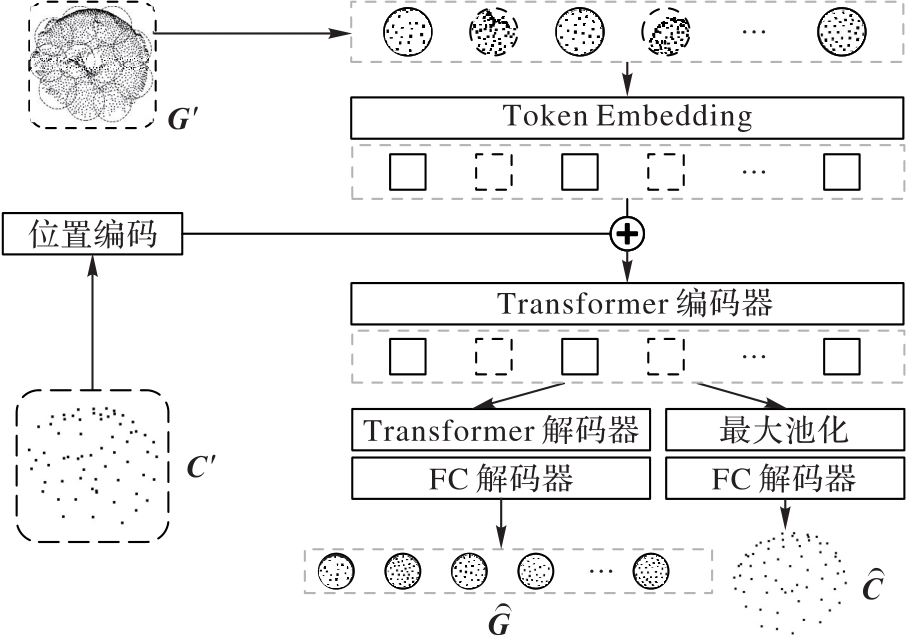
图3 点云重构网络的结构
Fig. 3 Structure of point cloud reconstruction network
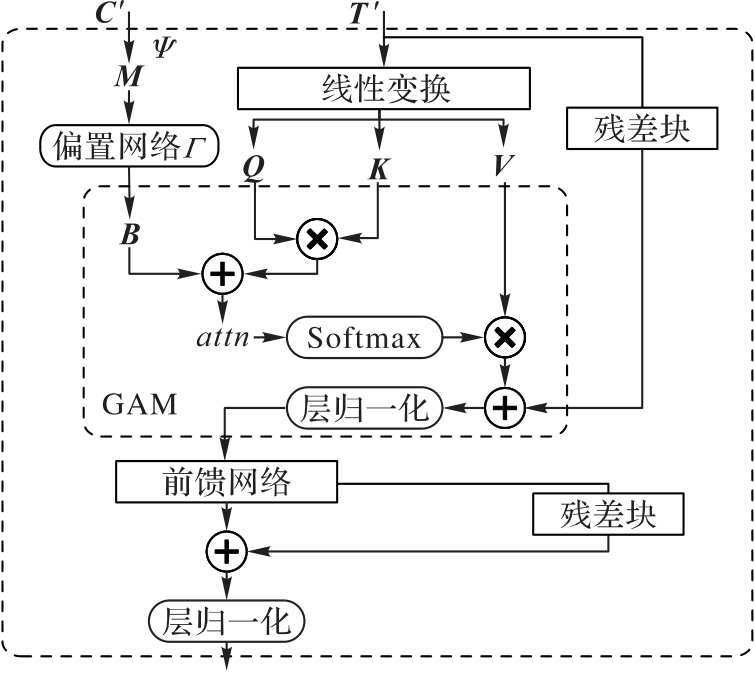
图4 GAM的结构
Fig. 4 Structure of GAM
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Voxel AE[ | 69.30 | 42.50 | 51.50 | 79.00 | 49.40 | 55.80 | 53.70 | 48.40 | 63.90 | 58.30 | 57.18 |
| PatchCore[ | 62.40 | 68.30 | 67.60 | 83.80 | 60.80 | 55.80 | 56.70 | 49.60 | 69.90 | 61.90 | 57.18 |
| PC-FPFH[ | 82.00 | 53.30 | 87.70 | 76.90 | 71.80 | 57.40 | 77.40 | 89.50 | 99.00 | 58.20 | 75.32 |
| 3D-ST[ | 86.20 | 48.40 | 83.20 | 89.40 | 84.80 | 66.30 | 76.30 | 68.70 | 95.80 | 48.60 | 74.77 |
| M3DM[ | 94.10 | 65.10 | 96.50 | 96.90 | 90.50 | 76.00 | 88.00 | 97.40 | 92.60 | 76.50 | 87.36 |
| AST[ | 88.10 | 57.60 | 96.50 | 95.70 | 67.90 | 79.70 | 99.00 | 91.50 | 95.60 | 61.10 | 83.27 |
| 3DRÆM[ | 98.90 | 99.60 | 98.60 | 98.80 | 96.90 | 97.70 | 99.10 | ||||
| Point-ReAD | 87.07 | 87.81 | 96.27 | 95.49 |
表1 不同方法在MVTec 3D-AD数据集上的PC-AUROC (%)
Tab. 1 PC-AUROC of different methods on MVTec 3D-AD dataset
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Voxel AE[ | 69.30 | 42.50 | 51.50 | 79.00 | 49.40 | 55.80 | 53.70 | 48.40 | 63.90 | 58.30 | 57.18 |
| PatchCore[ | 62.40 | 68.30 | 67.60 | 83.80 | 60.80 | 55.80 | 56.70 | 49.60 | 69.90 | 61.90 | 57.18 |
| PC-FPFH[ | 82.00 | 53.30 | 87.70 | 76.90 | 71.80 | 57.40 | 77.40 | 89.50 | 99.00 | 58.20 | 75.32 |
| 3D-ST[ | 86.20 | 48.40 | 83.20 | 89.40 | 84.80 | 66.30 | 76.30 | 68.70 | 95.80 | 48.60 | 74.77 |
| M3DM[ | 94.10 | 65.10 | 96.50 | 96.90 | 90.50 | 76.00 | 88.00 | 97.40 | 92.60 | 76.50 | 87.36 |
| AST[ | 88.10 | 57.60 | 96.50 | 95.70 | 67.90 | 79.70 | 99.00 | 91.50 | 95.60 | 61.10 | 83.27 |
| 3DRÆM[ | 98.90 | 99.60 | 98.60 | 98.80 | 96.90 | 97.70 | 99.10 | ||||
| Point-ReAD | 87.07 | 87.81 | 96.27 | 95.49 |
| 类别 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Voxel AE[ | 26.00 | 34.10 | 58.10 | 35.10 | 50.20 | 23.40 | 35.10 | 65.80 | 1.50 | 18.50 | 34.78 |
| PatchCore[ | 70.10 | 54.40 | 79.10 | 83.50 | 53.10 | 10.00 | 80.00 | 54.90 | 82.70 | 18.50 | 58.63 |
| PC-FPFH[ | 97.20 | 84.90 | 98.10 | 93.60 | 96.30 | 69.30 | 98.10 | 94.90 | 92.79 | ||
| 3D-ST[ | 95.00 | 48.30 | 98.60 | 92.10 | 90.50 | 63.20 | 94.50 | 98.80 | 97.60 | 54.20 | 83.28 |
| M3DM[ | 94.30 | 81.80 | 97.70 | 88.20 | 88.10 | 74.30 | 95.80 | 97.40 | 95.00 | 92.90 | 90.55 |
| 3DRÆM[ | 94.80 | 81.20 | 97.90 | 98.40 | 85.30 | 97.90 | |||||
| Point-ReAD | 97.75 | 92.02 | 97.77 | 94.89 | 96.88 | 98.80 | 94.66 |
表2 不同方法在MVTec 3D-AD数据集上的点级AUPRO (%)
Tab. 2 Point-level AUPRO of different methods on MVTec 3D-AD dataset
| 类别 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Voxel AE[ | 26.00 | 34.10 | 58.10 | 35.10 | 50.20 | 23.40 | 35.10 | 65.80 | 1.50 | 18.50 | 34.78 |
| PatchCore[ | 70.10 | 54.40 | 79.10 | 83.50 | 53.10 | 10.00 | 80.00 | 54.90 | 82.70 | 18.50 | 58.63 |
| PC-FPFH[ | 97.20 | 84.90 | 98.10 | 93.60 | 96.30 | 69.30 | 98.10 | 94.90 | 92.79 | ||
| 3D-ST[ | 95.00 | 48.30 | 98.60 | 92.10 | 90.50 | 63.20 | 94.50 | 98.80 | 97.60 | 54.20 | 83.28 |
| M3DM[ | 94.30 | 81.80 | 97.70 | 88.20 | 88.10 | 74.30 | 95.80 | 97.40 | 95.00 | 92.90 | 90.55 |
| 3DRÆM[ | 94.80 | 81.20 | 97.90 | 98.40 | 85.30 | 97.90 | |||||
| Point-ReAD | 97.75 | 92.02 | 97.77 | 94.89 | 96.88 | 98.80 | 94.66 |
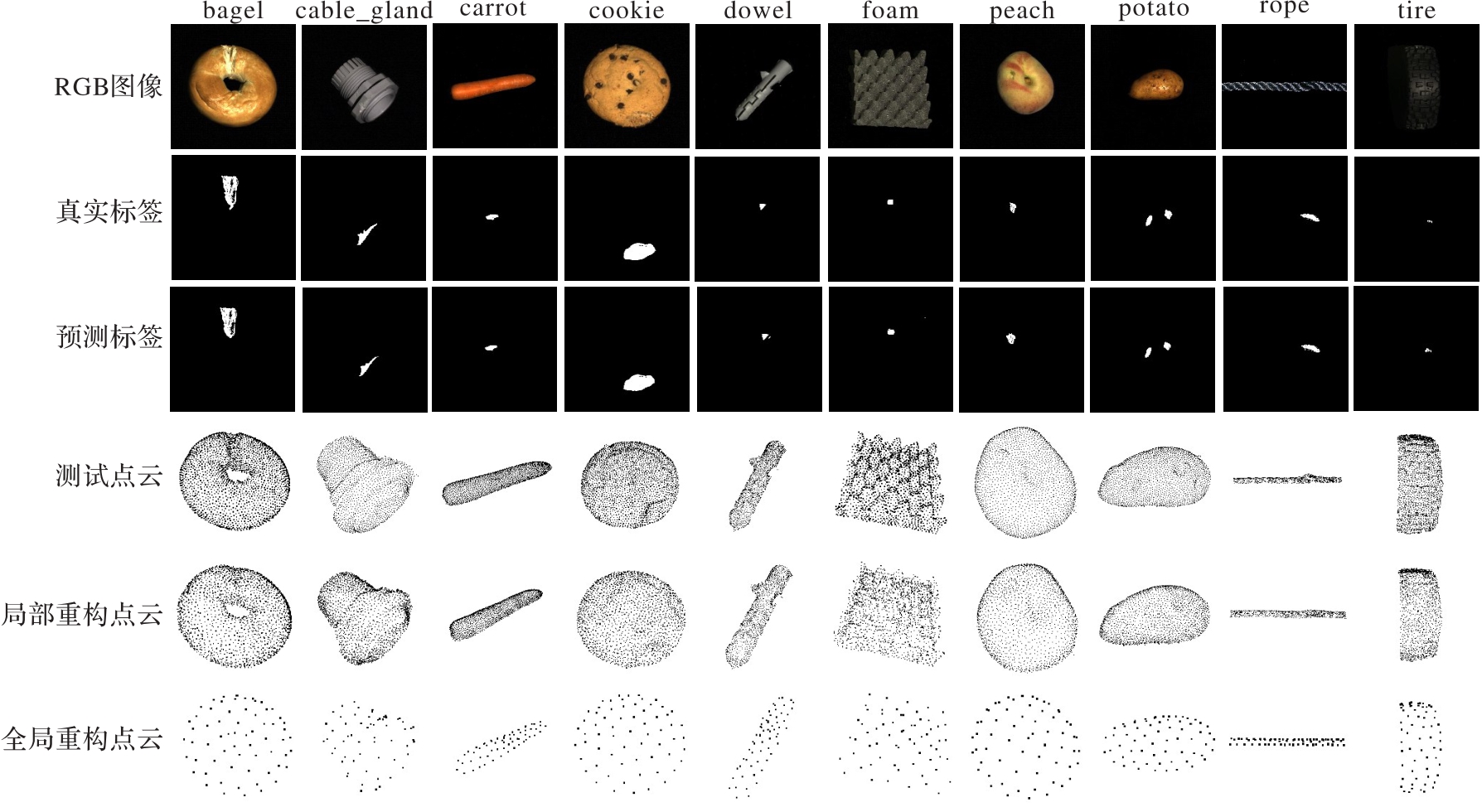
图5 Point-ReAD的异常检测结果及其点云重构的可视化
Fig. 5 Point-ReAD anomaly detection results and visualization of its point cloud reconstruction
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | |
| Mask | 94.67 | 97.67 | 79.50 | 90.33 | 89.02 | 97.32 | 96.67 | 93.52 | 92.26 | 91.56 | 84.96 | 75.40 |
| Point-ReAD | 98.44 | 97.75 | 87.07 | 92.02 | 98.11 | 97.77 | 97.74 | 94.89 | 96.90 | 95.11 | 87.82 | 78.89 |
| 方法 | peach | potato | rope | tire | mean | |||||||
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | |||
| Mask | 93.85 | 95.69 | 97.23 | 95.67 | 94.75 | 97.55 | 92.37 | 94.78 | 91.53 | 92.95 | ||
| Point-ReAD | 96.27 | 96.88 | 97.14 | 98.52 | 98.38 | 98.80 | 96.99 | 95.96 | 95.49 | 94.66 | ||
表3 自监督方式的消融实验结果 (%)
Tab. 3 Ablation experimental results of self-supervised method
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | |
| Mask | 94.67 | 97.67 | 79.50 | 90.33 | 89.02 | 97.32 | 96.67 | 93.52 | 92.26 | 91.56 | 84.96 | 75.40 |
| Point-ReAD | 98.44 | 97.75 | 87.07 | 92.02 | 98.11 | 97.77 | 97.74 | 94.89 | 96.90 | 95.11 | 87.82 | 78.89 |
| 方法 | peach | potato | rope | tire | mean | |||||||
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | PC-AUROC | AUPRO | |||
| Mask | 93.85 | 95.69 | 97.23 | 95.67 | 94.75 | 97.55 | 92.37 | 94.78 | 91.53 | 92.95 | ||
| Point-ReAD | 96.27 | 96.88 | 97.14 | 98.52 | 98.38 | 98.80 | 96.99 | 95.96 | 95.49 | 94.66 | ||
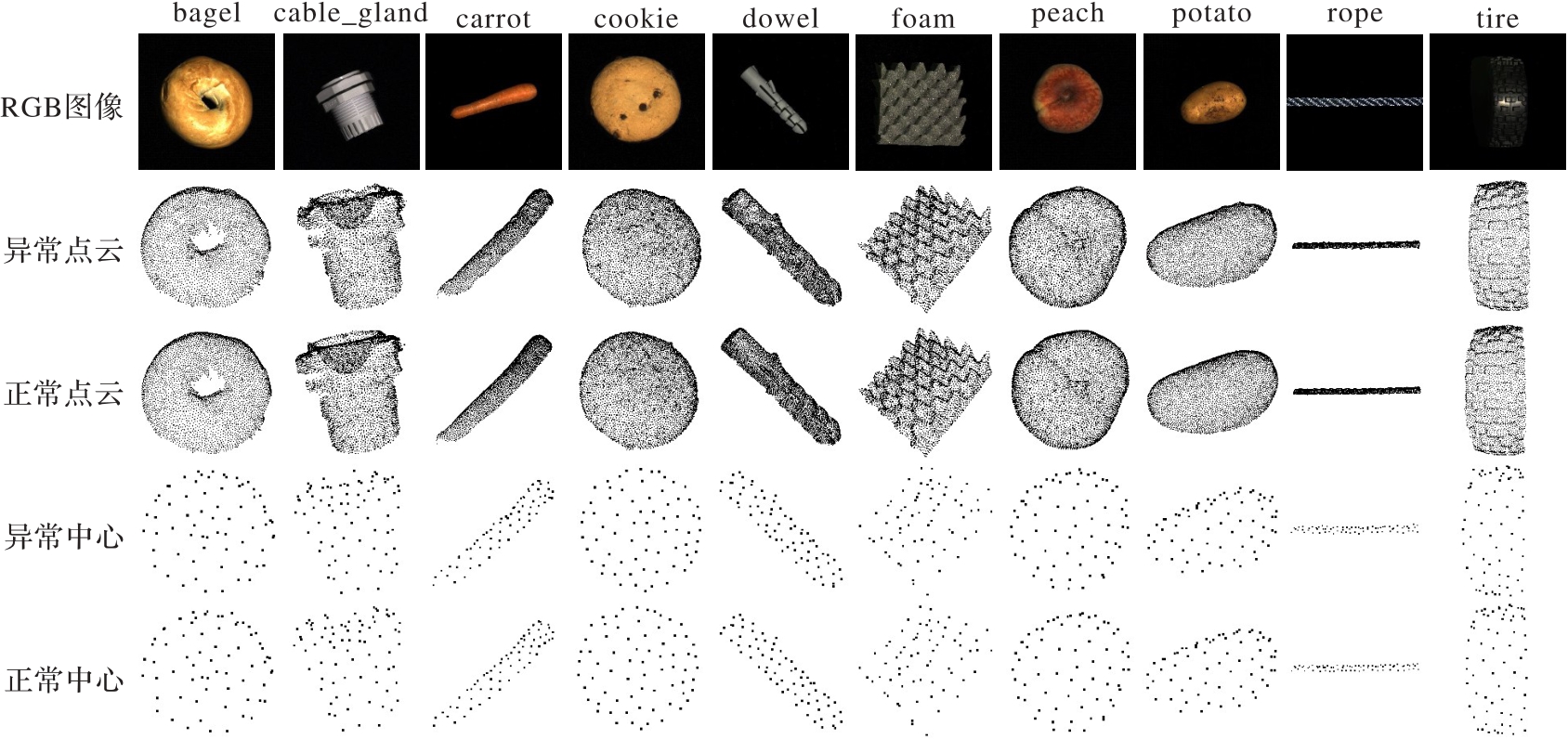
图 6 点云异常模拟结果的可视化
Fig. 6 Visualization of point cloud anomaly simulation results
| 注意力模块 | 无仿射变换 | 有仿射变换 | ||
|---|---|---|---|---|
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | |
| 标准 | 89.23 | 93.84 | 92.39 | 94.08 |
| GAM | 93.30 | 94.39 | 95.49 | 94.66 |
表4 GAM的消融实验结果 (%)
Tab. 4 Ablation experimental results of GAM
| 注意力模块 | 无仿射变换 | 有仿射变换 | ||
|---|---|---|---|---|
| PC-AUROC | AUPRO | PC-AUROC | AUPRO | |
| 标准 | 89.23 | 93.84 | 92.39 | 94.08 |
| GAM | 93.30 | 94.39 | 95.49 | 94.66 |
| 策略 | 重构局部 | 重构全局 | 重构整体 | PC-AUROC | AUPRO |
|---|---|---|---|---|---|
| I | √ | √ | 95.49 | 94.66 | |
| Ⅱ | √ | 89.31 | 92.29 | ||
| Ⅲ | √ | 79.62 | 84.12 | ||
| Ⅳ | √ | 92.04 | 93.03 |
表5 不同重构策略的结果对比 (%)
Tab. 5 Results comparison of different reconstruction strategies
| 策略 | 重构局部 | 重构全局 | 重构整体 | PC-AUROC | AUPRO |
|---|---|---|---|---|---|
| I | √ | √ | 95.49 | 94.66 | |
| Ⅱ | √ | 89.31 | 92.29 | ||
| Ⅲ | √ | 79.62 | 84.12 | ||
| Ⅳ | √ | 92.04 | 93.03 |
| F | PC-AUROC/% | ||||
|---|---|---|---|---|---|
| I=0.2 | I=0.3 | I=0.4 | I=0.5 | I=0.6 | |
| 0.2 | 93.05 | 94.31 | 91.52 | 86.30 | 77.95 |
| 0.4 | 94.88 | 95.49 | 94.30 | 88.07 | 76.55 |
| 0.6 | 90.43 | 91.14 | 86.01 | 81.33 | / |
| 0.8 | 73.23 | 75.28 | 74.50 | / | / |
表6 异常模拟超参数对性能的影响
Tab. 6 Influence of anomaly simulation hyperparameters on performance
| F | PC-AUROC/% | ||||
|---|---|---|---|---|---|
| I=0.2 | I=0.3 | I=0.4 | I=0.5 | I=0.6 | |
| 0.2 | 93.05 | 94.31 | 91.52 | 86.30 | 77.95 |
| 0.4 | 94.88 | 95.49 | 94.30 | 88.07 | 76.55 |
| 0.6 | 90.43 | 91.14 | 86.01 | 81.33 | / |
| 0.8 | 73.23 | 75.28 | 74.50 | / | / |
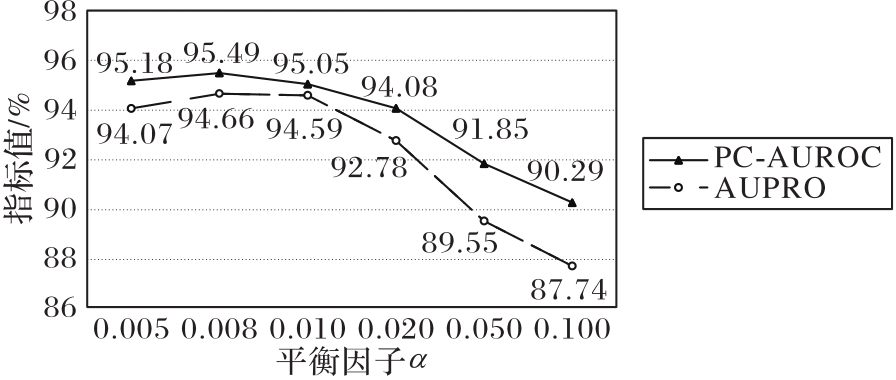
图7 平衡因子α对性能影响
Fig. 7 Influence of balance factor α on performance
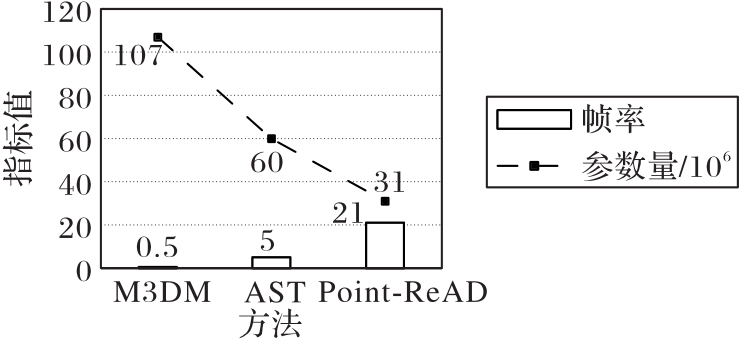
图 8 算法参数量与推理速度的分析
Fig. 8 Algorithm parameter number and inference speed analysis
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ASTRGB | 94.70 | 92.80 | 85.10 | 82.50 | 98.10 | 95.10 | 89.50 | 61.30 | 99.20 | 82.10 | 88.00 |
| M3DMRGB | 94.40 | 91.80 | 89.60 | 74.90 | 95.90 | 76.70 | 91.90 | 64.80 | 93.80 | 76.70 | 85.05 |
| 3DRÆMRGB | 94.20 | 90.60 | 81.60 | 66.60 | 78.30 | 91.90 | 65.60 | 78.40 | 98.60 | 92.50 | 83.83 |
| Point-ReAD | 98.44 | 87.07 | 98.11 | 97.74 | 96.90 | 87.81 | 96.27 | 97.14 | 98.38 | 96.99 | 95.49 |
表7 本文方法与部分二维方法的PC-AUROC对比 (%)
Tab. 7 Comparision of PC-AUROC of proposed method and some two-dimensional methods
| 方法 | bagel | cable_gland | carrot | cookie | dowel | foam | peach | potato | rope | tire | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|
| ASTRGB | 94.70 | 92.80 | 85.10 | 82.50 | 98.10 | 95.10 | 89.50 | 61.30 | 99.20 | 82.10 | 88.00 |
| M3DMRGB | 94.40 | 91.80 | 89.60 | 74.90 | 95.90 | 76.70 | 91.90 | 64.80 | 93.80 | 76.70 | 85.05 |
| 3DRÆMRGB | 94.20 | 90.60 | 81.60 | 66.60 | 78.30 | 91.90 | 65.60 | 78.40 | 98.60 | 92.50 | 83.83 |
| Point-ReAD | 98.44 | 87.07 | 98.11 | 97.74 | 96.90 | 87.81 | 96.27 | 97.14 | 98.38 | 96.99 | 95.49 |
| [1] | LIU J, XIE G, WANG J, et al. Deep industrial image anomaly detection: a survey[J]. Machine Intelligence Research, 2024, 21(1): 104-135. |
| [2] | BERGMANN P, JIN X, SATTLEGGER D, et al. The MVTec 3D-AD dataset for unsupervised 3D anomaly detection and localization[C]// Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications — Volume 5: VISAPP. Setúbal: SciTePress, 2022: 202-213. |
| [3] | PANG Y, WANG W, TAY F E H, et al. Masked autoencoders for point cloud self-supervised learning[C]// Proceedings of the 2022 European Conference on Computer Vision, LNCS 13662. Cham: Springer, 2022: 604-621. |
| [4] | FAN H, SU H, GUIBAS L. A point set generation network for 3D object reconstruction from a single image[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2463-2471. |
| [5] | ROTH K, PEMULA L, ZEPEDA J, et al. Towards total recall in industrial anomaly detection[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 14298-14308. |
| [6] | HORWITZ E, HOSHEN Y. Back to the feature: classical 3D features are (almost) all you need for 3D anomaly detection[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 2968-2977. |
| [7] | WANG Y, PENG J, ZHANG J, et al. Multimodal industrial anomaly detection via hybrid fusion[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 8032-8041. |
| [8] | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| [9] | BERGMANN P, SATTLEGGER D. Anomaly detection in 3D point clouds using deep geometric descriptors[C]// Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2023: 2612-2622. |
| [10] | HECKLER L, KÖNIG R, BERGMANN P. Exploring the importance of pretrained feature extractors for unsupervised anomaly detection and localization[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2023: 2917-2926. |
| [11] | DENG J, DONG W, SOCHER R, et al. ImageNet: a large-scale hierarchical image database[C]// Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2009: 248-255. |
| [12] | BENGS M, BEHRENDT F, KRÜGER J, et al. Three-dimensional deep learning with spatial erasing for unsupervised anomaly segmentation in brain MRI[J]. International Journal of Computer Assisted Radiology and Surgery, 2021, 16(9): 1413-1423. |
| [13] | SIMARRO VIANA J, DE LA ROSA E, VANDE VYVERE T, et al. Unsupervised 3D brain anomaly detection[C]// Proceedings of the 2020 International MICCAI Brainlesion Workshop, LNCS 12658. Cham: Springer, 2021: 133-142. |
| [14] | LI W, XU X, GU Y, et al. Towards scalable 3D anomaly detection and localization: a benchmark via 3D anomaly synthesis and a self-supervised learning network[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 22207-22216. |
| [15] | ZAVRTANIK V, KRISTAN M, SKOČAJ D. DRÆM — a discriminatively trained reconstruction embedding for surface anomaly detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 8310-8319. |
| [16] | 刘永江,陈斌. 基于多尺度记忆库的像素级无监督工业异常检测[J].计算机应用, 2024, 44(11): 3587-3594. |
| LIU Y J, CHEN B. Pixel-level unsupervised industrial anomaly detection based on multi-scale memory bank[J]. Journal of Computer Applications, 2024, 44(11): 3587-3594. | |
| [17] | YANG M, WU P, FENG H. MemSeg: a semi-supervised method for image surface defect detection using differences and commonalities[J]. Engineering Applications of Artificial Intelligence, 2023, 119: No.105835. |
| [18] | SONG J W, KONG K, PARK Y I, et al. AnoSeg: anomaly segmentation network using self-supervised learning[EB/OL]. [2023-07-02].. |
| [19] | ZHANG X, LI N, LI J, et al. Unsupervised surface anomaly detection with diffusion probabilistic model[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6759-6768. |
| [20] | ZAVRTANIK V, KRISTAN M, SKOČAJ D. Keep DRÆMing: discriminative 3D anomaly detection through anomaly simulation[J]. Pattern Recognition Letters, 2024, 181: 113-119. |
| [21] | ZAVRTANIK V, KRISTAN M, SKOČAJ D. Cheating depth: enhancing 3D surface anomaly detection via depth simulation[C]// Proceedings of the 2024 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2024: 2153-2161. |
| [22] | YANG Y, FENG C, SHEN Y, et al. FoldingNet: point cloud auto-encoder via deep grid deformation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 206-215. |
| [23] | YU X, TANG L, RAO Y, et al. Point-BERT: pre-training 3D point cloud Transformers with masked point modeling[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 19291-19300. |
| [24] | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| [25] | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| [26] | HONG C Y, CHOU Y Y, LIU T L. Attention discriminant sampling for point clouds[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 14383-14394. |
| [27] | ZHANG R, GUO Z, FANG R, et al. Point-M2AE: multi-scale masked autoencoders for hierarchical point cloud pre-training[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2022: 27061-27074. |
| [28] | RUDOLPH M, WEHRBEIN T, ROSENHAHN B, et al. Asymmetric student-teacher networks for industrial anomaly detection[C]// Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2023: 2591-2601. |
| [1] | 李维刚, 邵佳乐, 田志强. 基于双注意力机制和多尺度融合的点云分类与分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3003-3010. |
| [2] | 刘超, 余岩化. 融合降噪策略与多视图对比学习的知识感知推荐模型[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2827-2837. |
| [3] | 谢劲, 褚苏荣, 强彦, 赵涓涓, 张华, 高勇. 用于胸片中硬负样本识别的双支分布一致性对比学习模型[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2369-2377. |
| [4] | 闫龙博, 毛文涛, 仲志鸿, 范黎林. 面向城市排水管网缺陷诊断的鲁棒无监督多任务异常检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1833-1840. |
| [5] | 吴宗航, 张东, 李冠宇. 基于联合自监督学习的多模态融合推荐算法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1858-1868. |
| [6] | 李维刚, 李歆怡, 王永强, 赵云涛. 基于自适应动态图卷积和无参注意力的点云分类分割方法[J]. 《计算机应用》唯一官方网站, 2025, 45(6): 1980-1986. |
| [7] | 王文鹏, 秦寅畅, 师文轩. 工业缺陷检测无监督深度学习方法综述[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1658-1670. |
| [8] | 陈子和, 陈斌. 基于多表征融合的无监督点云异常检测[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1677-1685. |
| [9] | 陈凯, 叶海良, 曹飞龙. 基于局部-全局交互与结构Transformer的点云分类算法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1671-1676. |
| [10] | 杨光局, 罗天健, 王开军, 杨思琪. 多分支多视图的时间序列上下文对比表征学习方法[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1042-1052. |
| [11] | 朱俊屹, 常雷雷, 徐晓滨, 郝智勇, 于海跃, 姜江. 基于最小先验知识的自监督学习方法[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1035-1041. |
| [12] | 潘理虎, 彭守信, 张睿, 薛之洋, 毛旭珍. 面向运动前景区域的视频异常检测[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1300-1309. |
| [13] | 薛振华, 李强, 黄超. 视觉基础模型驱动的像素级图像异常检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 823-831. |
| [14] | 任志强, 陈学斌. 基于历史模型更新的自适应防御机制FedAud[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 490-496. |
| [15] | 文诗佳, 金世俊. 结合目标检测和特征点关联的动态视觉SLAM算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 610-615. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||